




产品描述
体积小、重量轻,这是微型谐波减速器最显著的特点之一,其小巧的体积使其能够适应空间有限的应用场景,如小型机器人、精密仪器设备等。与传统减速器相比,微型谐波减速器在体积和重量上具有很大优势,可以有效降低设备整体重量,提高便携性.



产品参数
| 减速比 | 30 | 50 | 80 | 100 |
| 2000r/min时输入额定转矩 | 2.1Nm | 3.2Nm | 4.2Nm | 4.8Nm |
| 启动、停止时允许峰值转矩 | 4.1Nm | 7.8Nm | 9.5Nm | 10.5Nm |
| 平均负载最大允许转矩 | 3.1Nm | 5.1Nm | 7.2Nm | 8.7Nm |
| 瞬时最大允许转矩 | 8.2Nm | 15Nm | 20Nm | 23Nm |
| 齿隙 | ≤20Arcsec | ≤50Arcsec | ≤10Arcsec | ≤10Arcsec |
| 允许最大输入转速 | 8500rpm | |||
| 允许平均输入转速 | 3500rpm | |||
| 转动惯量(1/4GD) | 1.4x10² kgcm² 1.2x10-2 | |||
技术创新
超小直径轴承
麻雀虽小,五脏俱全,但微谐波齿模最小数量只有0.08模,常规齿加工刀具无法胜任。
交叉滚子轴承和柔性轴承最小直径只有5mm和12mm,这三大金属切削技术难点是限制微谐波发展的主要原因。
信拓技术团队联合各领域技术专家进行创新研究,逐步攻克相关难题。
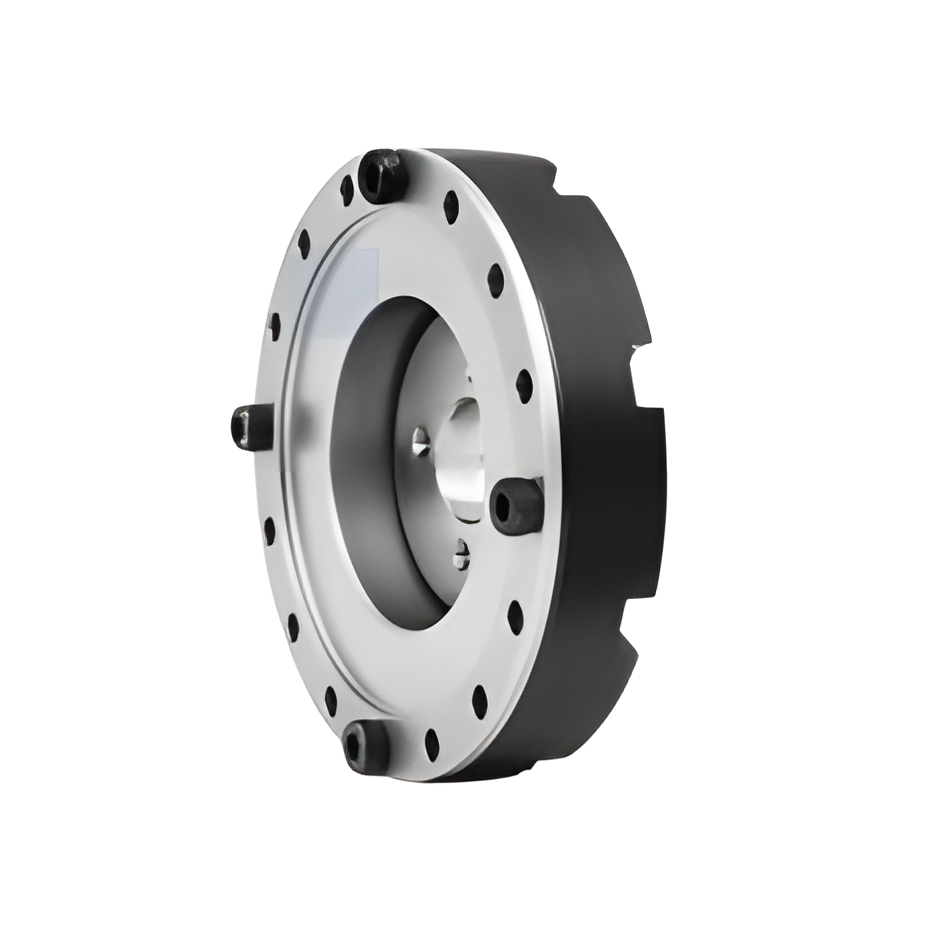
产品展示
于齿形设计上,我们运用先进的计算机辅助设计技术与理论力学分析手段,深入研究不同齿形参数对传动效率、精度及承载能力的影响规律,设计出多种创新齿形结构,并通过大量模拟实验与实际测试进行优化验证。

随着科技的持续迅猛发展,谐波传动技术也在不断地迭代演进。新型材料的研发与应用为柔轮等部件带来了更为卓越的力学性能与耐用性,使其能够在更为严苛的工况条件下稳定运行。同时,先进的制造工艺如精密数控加工、特种成型技术等的引入,使得谐波传动装置的制造精度与生产效率得到了质的飞跃,进一步降低了生产成本并提升了产品的市场竞争力
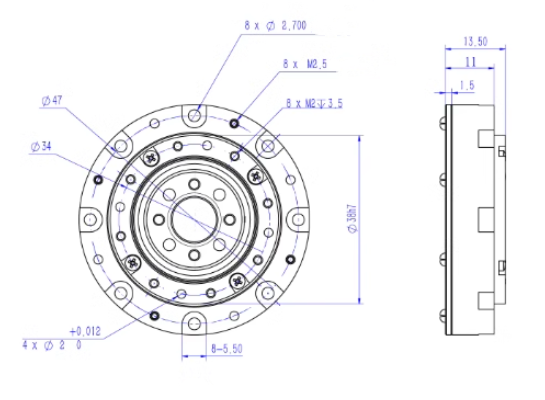
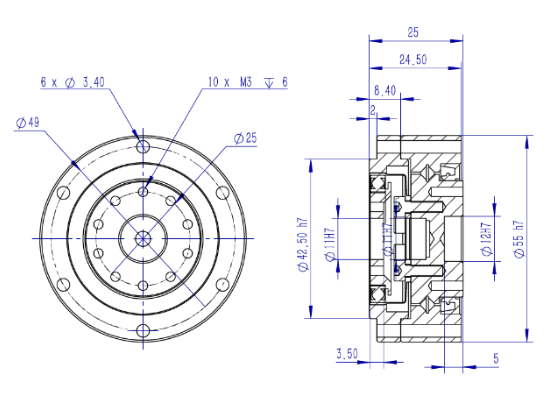
尺寸和接口
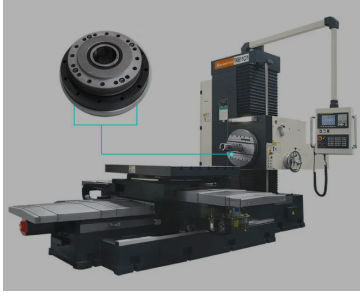
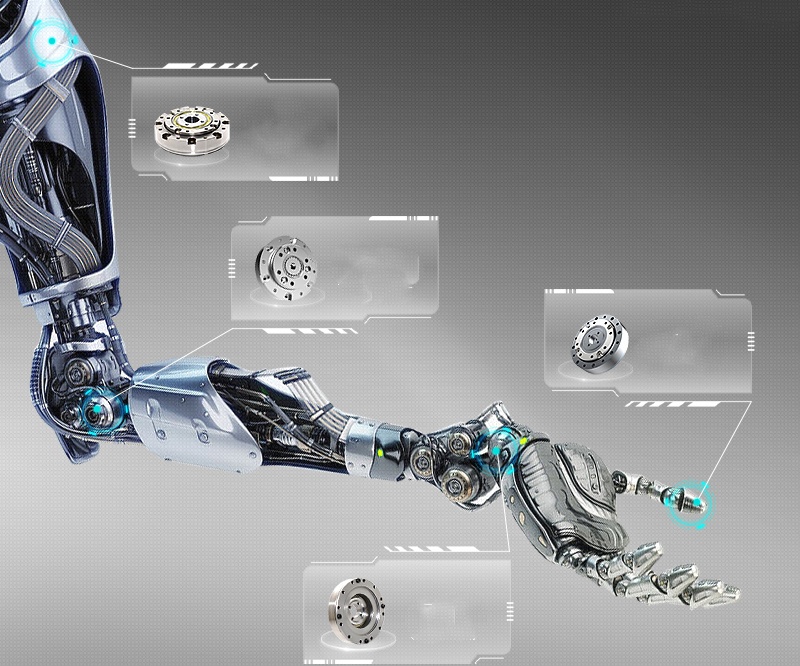
应用案例
谐波减速器体积小、重量轻,可安装在机械手狭小的空间内,为手部关节提供精确的动力传输和运动控制,让机械手实现灵活的运动。此外,谐波减速器的低振动、低噪音特性也有助于降低手部关节运动时的振动和噪音,提高机器人的运行稳定性和静音性。人形机器人的肢体需要完成各种复杂、细腻的动作,如抓取物体、行走、攀爬等,谐波减速器的传动精度高,可以保证机器人肢体关节准确到达预定位置,实现高精度的运动控制。