














产品描述
该机器人关节电机采用模块化设计,关节模块紧凑,其重量、尺寸、安装方式、外观灯与传统产品相比都做了相当大的优化,主要应用于协作机器人和轻型机器人,可以在很大程度上满足小型化、轻量化、模块化的需求。也可广泛应用于工业机器人、服务机器人、工业自动化设备、车床上设备等。



产品参数
| 型号 | 参数 | M5730(B)E17B50L | M5730(B)E17B80L | M5730(B)E17B100L |
| 总体参数 | 电机额定电压 | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| 电机额定电流 | 3.5 A | 3.5 A | 3.5 A | |
| 减速后输出扭矩 | 34NM | 35NM | 51NM | |
| 重量 | 1KG | 1KG | 1KG | |
| 减速后的速度范围 | 0~30RPM | 0~18RPM | 0~15RPM | |
| 减速机参数 | 减速比 | 50 | 80 | 100 |
| 额定转矩 | 21NM | 29NM | 31NM | |
| 峰值启停转矩 | 44NM | 56NM | 70NM | |
| 平均负载扭矩的允许最大值 | 34NM | 35NM | 51NM | |
| 瞬时允许最大转矩 | 91NM | 113NM | 143NM | |
| 背隙 | <20 arc seconds | <20 arc seconds | <20 arc seconds | |
| 设计寿命 | 8500H | 8500H | 8500H | |
| 电机参数 | 转矩 | 1NM | 1NM | 1NM |
| 额定转速 | 1500RPM | 1500RPM | 1500RPM | |
| 最大转速 | 2000RPM | 2000RPM | 2000RPM | |
| 权力 | 100W | 100W | 100W | |
| 电阻 | 0.86 | 0.86 | 0.86 | |
| 电感 | 0.8mh | 0.8mh | 0.8mh | |
| 转动惯量 | 0.69 x 10-4 KG/M2 | 0.69 x 10-4KG/M2 | 0.69 x 10-4KG/M2 | |
| 反馈信号 | 多圈绝对编码器(15位单圈和9位多圈) | |||
| 冷却方式 | 冷却方式 | |||
| 位置控制方式 | 最大输入脉冲频率 | 500KHz | ||
| 脉冲指令方式 | 脉冲+方向,A相+B相(需要控制器支持AB脉冲) | |||
| 电子传动比 | 设置“1~65535”为“1~65535” | |||
| 位置采样频率 | 2Khz | |||
| 保护功能 | 锁电机报警,过流报警 | |||
| 通信接口 | Canopen (CAN通信)/Modbus(485通信) | |||
| 环境 | 环境温度 | 0 ~ 40° | ||
| 电机允许最高温度 | 85° | |||
| 湿度 | 5 ~ 95% | |||
产品展示

- CANopen 通讯
- 内置隔离电源
- 低功耗多转绝对值内置电池
- 自动充电
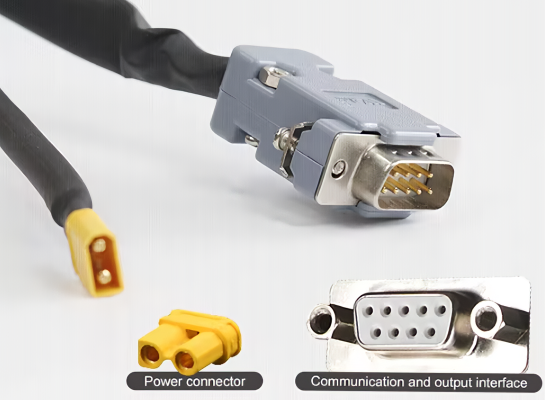
- 电机通电后,内部有一个充电电路给电池充电
- 电机不通电后,带动电机轴转动唤醒编码器,继续记忆位置,电池电流消耗仅为0.07mA
- 电池电量下降报警
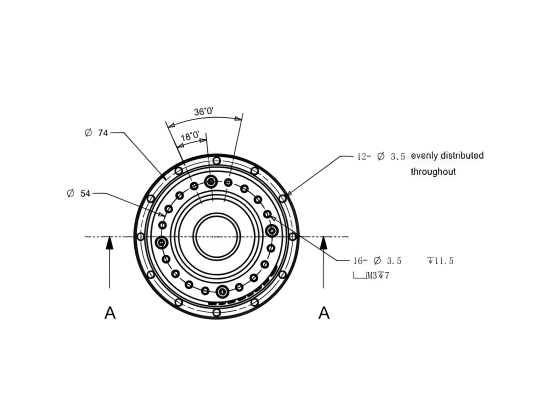
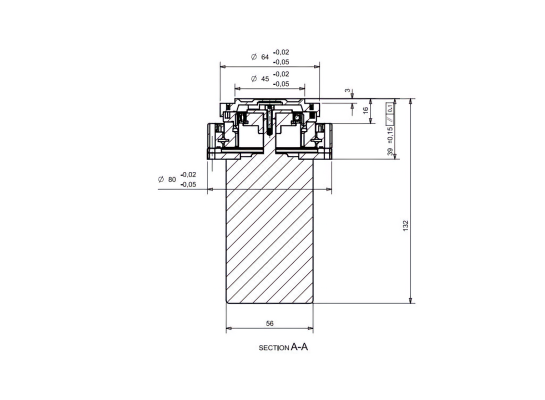
尺寸和接口
应用案例
关节模组是机械臂的关键组成部分。 它能够实现机械臂各个关节的灵活转动,从而精确地完成诸如焊接、喷漆、搬运等工作。 例如在汽车制造工厂的焊接工作中,机械臂的关节模组可以精确控制焊接头的位置和姿态。 通过多个关节模组的协同工作,机械臂能够以高速度和高精度在复杂的汽车车身表面进行焊接,确保焊接质量的稳定性和一致性。
对于物料搬运机器人,关节模组使得机械臂可以在三维空间内自由伸展和抓取。 其可以根据物料的形状、重量和放置位置等因素,灵活调整关节角度,准确地抓取物料并放置到指定位置,提高了工厂的自动化生产效率。


