








 品牌官方供应商
8 年
品牌官方供应商
8 年


Laser Binocular Vision Camera Sensor
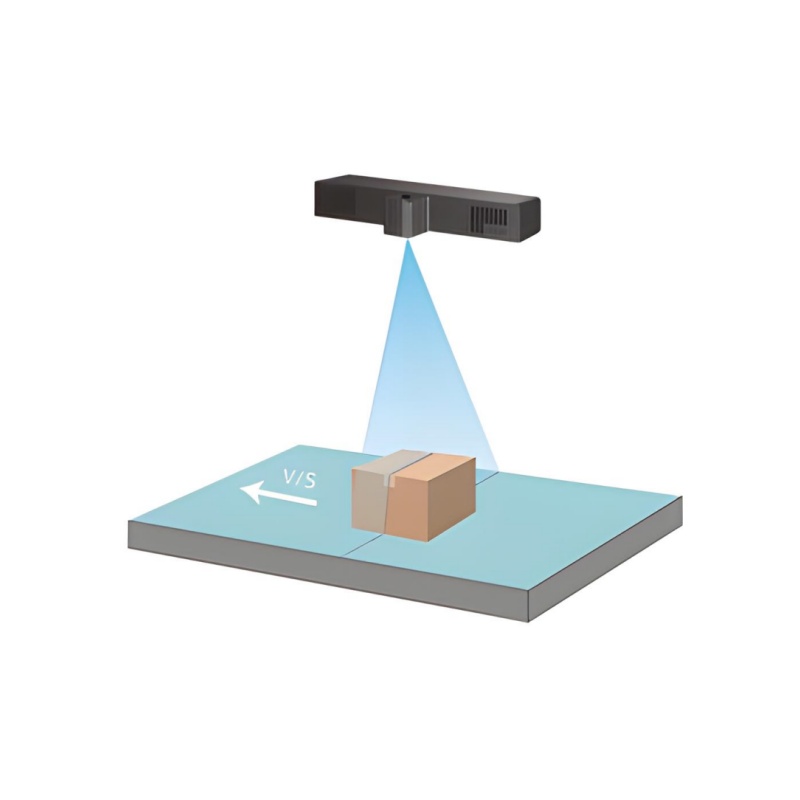
Belt crack detection, measurement, counting etc.
USD: 9980-10680
ablity:Monthly Output200
- Paglalarawan ng Produkto
- Product Params
Paglalarawan ng Produkto

VSZ1 camera adopts a fully intelligent terminal design and utilizes the principle of binocular parallax for stereo data reconstruction. It can be directly connected to a PLC and standardized output of stereo point cloud data models, depth maps, etc. on the camera end.
And multiple intelligent algorithms can be embedded in the camera end, including but not limited to stereo positioning, object counting, flow monitoring, object measurement, object surface detection, and other algorithms, without the need for additional integration with industrial control hosts.
Can be widely applied to the intelligent transformation needs of industries such as warehousing logistics, tobacco industry logistics, sea salt transportation, stone transportation, steel inbound and outbound management, industrial grabbing, tire detection, etc.

It is at the industry-leading level in large field of view scanning, low processing delay, and high-precision positioning, and can be widely used in warehousing logistics, tobacco industry logistics, sea salt transportation, stone transportation, steel storage management, industrial grasping, tire inspection and other industries. transformation needs.
Size(LXWXH) | 260*66*75 mm |
Weight | 2kg |
Laser | 450nm (blue), 850nm (infrared), optional with other wavelength lasers |
External interface | Gigabit Ethernet port |
Communication mode | Modbus Tcp communication protocol, SDK function call |
Support system | Windows(7,10)/Linux |
Depth pixels | 300w(2048*1536) |
Max. cloud point data volume | 600w/s |
Max. depth data generation speed | 3000 frames/s |
Accuracy of detection | Z-axis: Max. detection accuracy: ± 0.004mm (±0.02mm) - (±0.13mm)@0.5m installation height (±0.07mm) - (±0.5mm)@1m installation height (±0.14mm) - (±1.1mm)@2m installation height (±0.30mm) - (±2.35mm)@3m installation height
Y-axis: Max. detection accuracy: ± 0.022mm (±0.05mm) - (±0.41mm)@0.5m installation height (±0.11mm) - (±0.80mm)@1m installation height (±0.21mm) - (±1.62mm)@2m installation height (±0.31mm) - (±2.42mm)@3m installation height |
Point cloud data processing latency | <1ms |
Result data processing delay | <10ms |
Supported object motion speed | 6m/s real-time monitoring |
Pupil distance | 160mm、320mm (Pupil distance can be customized according to application scenarios) |
Sequential triggering method | Soft trigger/level trigger/pulse trigger |
Depth of Field Size | Capable of meeting a depth of 2 meters with millimeter level accuracy |
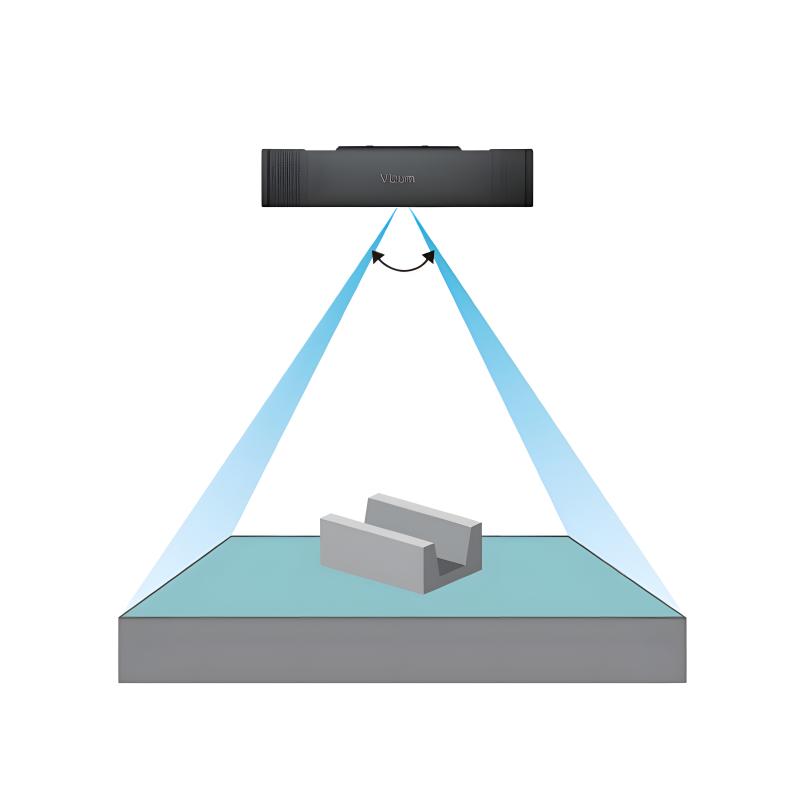
Single camera scanning width | Capable of meeting a field of view width of 3 meters with millimeter level accuracy |
Scanning angle of stereoscopic camera lens | 61 °, interchangeable short and telephoto lenses |
Camera type | CMOS |
Exposure mode | Global shutter |
Lens interface | M12 |
IP degree | IP65 |
Voltage/power consumption | 12V/24w |
Operation temperature | -20℃~70℃ |
Multiple machines work together | Yes |








Stereo positioning
It can perform high-precision spatial coordinates and attitude positioning on all point cloud data generated by objects, and can be combined with robotic arms for grasping, loading and unloading, sorting and other industrial applications.


Surface defect detection of objects