












产品描述
产品信息
型号:AQMD6008BLS-TF 电压范围:9-60V |
|

功能特点
1、电压范围9~60V,额定输出电流8A;最大输出电流16A;
2、电位器、0~3.3/5/10V模拟信号、0/3.3/5/24V逻辑电平、开关量、PWM、频率、脉冲、RS485/CAN多种输入信号;
3、占空比调速、转矩控制(稳流)、速度闭环控制(稳速)、位置闭环控制(角度/距离控制)多种调速方式;
4、支持方波与正弦波驱动方式自由切换,兼顾方波驱动方式的响应实时性和正弦波驱动方式的低噪声特性;
5、支持加减速缓冲时间与加减速加速度控制,可在指定行程内自动加减速并精确定位;
6、电机电流PID调节,最大启动/负载电流、制动(刹车)电流可分别配置;电机过载/堵转限流停转;
7、支持驱动器内部温度检测,可配置过热保护温度;
8、支持倍流输出,启动、大负载时可大力矩输出;
9、支持驱动器电源电压监测,可配置过压/欠压关断检测值:
10、支持电机转速测量,电机堵转检测;支持外接限位开关限位和堵转限位;
11、支持电机相序学习;支持霍尔错误保护、故障报警;
12、485/CAN 共模电压保护,支持多站点通讯,方便多种控制器(如单片机、PC机或PLC)控制,支持通讯中断停转保护;
13、极小的PWM死区,仅0.5us,PWM有效范围0.1%~100%;
14、20kHz的PWM频率,电机调速无PWM器叫声;
15、使用ARM Cortex-M3/M4处理器。
产品特色

一键电机相序适配
电机的三电源线或三霍尔信号线,可不按顺序与驱动器连接,只需一键操作,对电机霍尔顺序进行学习,通过对电机6次换向控制后学习即完成,电机方可正常驱动。
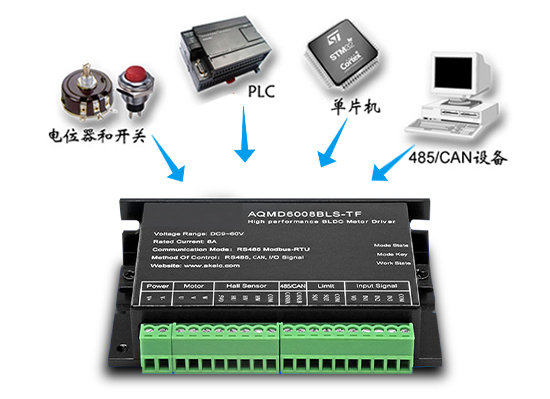
兼容多种控制信号和多种控制方式
支持电位器、模拟量、PWM/频率/脉冲、485/CAN多种控制信号,支持电机开环调速、闭环调速、位置控制、力矩控制多种工作模式。
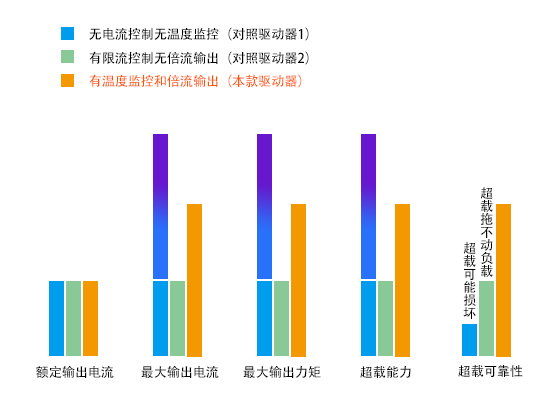
可大力矩启动 安全超载
支持倍流输出,从而实现至多2倍额定力矩启动和2倍额定力矩超载运行;可设定倍流时间,防止电机长时间超载运行而损坏;同时,驱动器对内部温度实时监控,当温度达到设定值时,禁用倍流或关断输出,从而保护驱动器。

极低速稳速刚性强
驱动器时间-位置闭环调速算法可使电机在低速运行时刚性强,低至60RPM转速也可大力矩闭环调速控制。
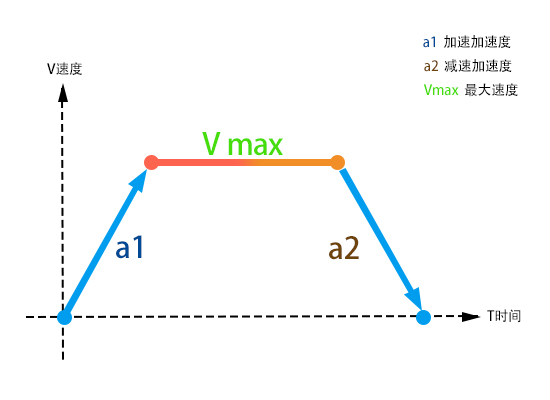
高速定位精准平稳
驱动器先进的位置控制算法可根据给定的加速度和最大速度按照牛顿运动定律控制电机在高速运行情况下也能精准平稳定位。
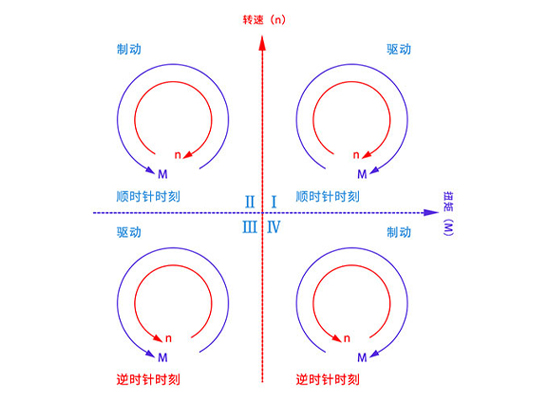
四象限运行控制
可控制电机产生与电机转动方向相反的转矩并进行加速度控制,从而无论水平或竖直运动,闭环调速和位置控制均能可靠控制。
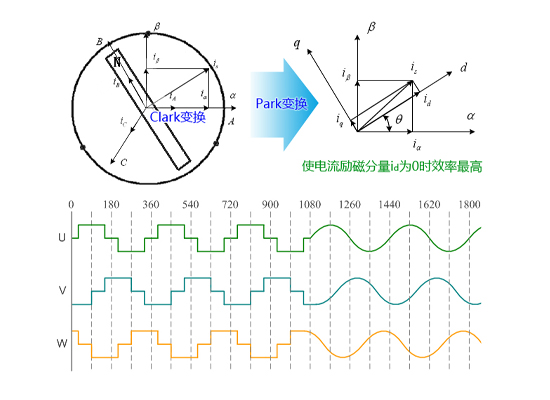
场定向矢量控制
场定向矢量控制(FOC)为SVPWM输出方式,具有电机输出力矩脉动小、噪声小的特点,驱动器开环调速、闭环调速和位置控制均支持FOC方式,并支持方波驱动方式与FOC方式自由切换。

自定义过程控制
对于常规的运动过程控制,可通过一段自定义过程脚本实现运动过程逻辑控制,从而省掉PLC这样的逻辑控制器。

多重保护安全可靠
电压、电流、温度实时监控,过热、过流、堵转、异常大电流、485共模电压保护多重保护,驱动器工作更稳定可靠。
尺寸图

原理概述
本驱动器使用先进的电机电流精确检测技术、有感无刷电机自测速、有感无刷电机转动位置检测、再生电流恒电流制动(或称刹车)技术和强大的 PID 调节技术可完美地控制电机平稳正反转、换向及制动,输出电流实时调控防止过流,精准控制电机转速和转动位置,电机响应时间短且反冲力小。
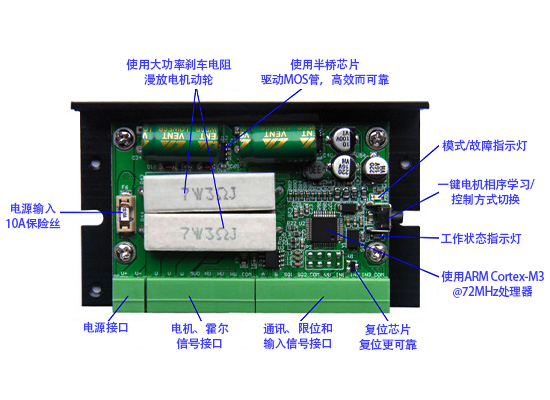
驱动器正面
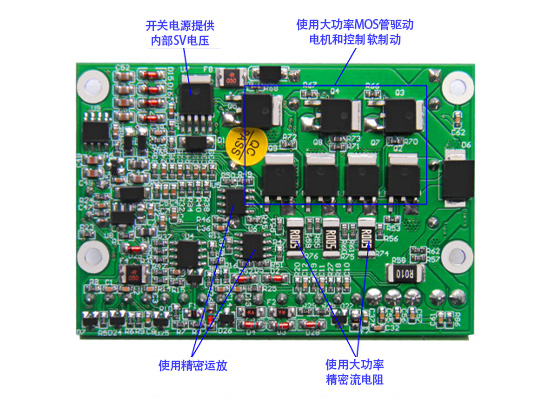
驱动器背面
产品参数
项目 | 参数 | 项目 | 参数 |
电源输入电压 | DC~9V60V | 稳速控制调节范围 | -32768Hz~32767Hz |
额定输出电流 | 8A | 位置控制调节范围 | -2147483648~2147483647 |
最大输出电流 | 16A(倍流输出)/10A(非倍流输出) | 转矩控制调节范围 | 0.5A~10A |
最大软制动电流 | 3A | 瞬间过流关断电流设定范围 | 0~25A |
支持电机转速范围 | 方波:0~100000RPM | 倍流倍数可设定范围 | 1.00~2.00 |
输出通道数 | 单路 | 倍流时间可设定范围 | 0.1S~99.9S |
电位器阻值 | 10K~50K | 温度测量范围 | -40℃~125℃ |
输入信号接口接受电压范围 | -0.5V~+25V(故障/完成信号输出端口除外) | 电压有效检测范围 | 8~66V |
单端模拟信号输入电压范围 | 0~3.3V 范围内任意 | 限位控制 | 支持;可外接两限位开关限位或堵转时限位 |
差分模拟信号输入电压范围 | -3.3V~+3.3V范围内任意 | 软启动/软制动 | 支持;可限流启动、制动及设定加减速时间与加速度 |
逻辑电平电乐范围 | 0~5V范围内任意,LvTTL,TTL,HVTTL等 | 过流/堵转保护 | 支持;过流时限流输出;堵转时可停机 |
RS485/CAN 通讯参数范围 | 485波特率1200~115200bps,CAN波特率10K-1Mbps | 电源反接保护 | 支持:内置速熔保险丝反接保护 |
对 Modbus 支持情况 | 支持Modbus-RTU,支持03H、06H、10H功能码,可配置从站地址范围1~128,支持广播 | 输出短路保护 | 部分情况下瞬间大电流检测并保护(需配置过流关断值) |
电流检测分辨率 | 0.01A | 制动动作时间 | 软制动通常 0.1s~0.3s |
稳流控制精度 | 0.02A | 工作温度 | -30℃~70℃ |
占空比调速范围 | -100.0%~0,0~100.0% | 外形尺寸 | 93mmx56mmx20.5mm |
子系列参数对比 | ||||
对比项目 | 标准款 | 485/CAN兼容款 | 方波/正弦波 | 无感大力矩兼容款 |
控制信号类型 | 电位器、0~3.3V模拟 | 电位器、0~3.3V/10V模拟量、PWM、频率、脉冲、电平、开关量、 | ||
电机控制方式 | 有感无刷电机:占空比(开环)调速、速度闭环、位置闭环、力矩控制 | |||
无感无刷电机:不支持无感无刷电机 | 无感无刷电机:占空比(开环) | |||
电机驱动方式 | 方波 | 方波/正弦波(FOC) | ||
支持电机转速范围 | 方波:建议0~100000RPM | 方波: | 有感无刷电机 | |
无感无刷电机 | ||||
四象限运行控制 | 位置闭环 | 开环、速度闭环、位置闭环 | ||
额定电流 | 8A | |||
最大输出电流 | 16A | |||
倍流输出 | 支持 | 支持 | 支持 | 支持 |
过载限流 | 支持 | 支持 | 支持 | 支持 |
倍流输出 | 支持 | 支持 | 支持 | 支持 |
过载限流 | 支持 | 支持 | 支持 | 支持 |
堵转停机 | 支持 | 支持 | 支持 | 支持 |
异常大电流关断 | 支持 | 支持 | 支持 | 支持 |
短路保护 | 全速时支持,不建议短路 | 有感无刷支持,不建议短路 | ||
内部温度测量/ | 支持 | 支持 | 支持 | 支持 |
电源电压测量/ | 支持 | 支持 | 支持 | 支持 |
通讯接口保护 | 485共模电压保护 | 隔离款:485/CAN通讯隔离 | 485/CAN共模电压保护 | 485/CAN通讯隔离 |
适合电机参数: | ||||
额定电压60V的电机,适合额定功率335W及以下或标识额定电流8A以下电机长时间满额工作; | ||||
(电机上标识的额定功率一般是指输出功率,考虑电机做工损耗,故计算额定电流时需考虑电机效率,额定电流=额定功率/额定电压/效率) | ||||
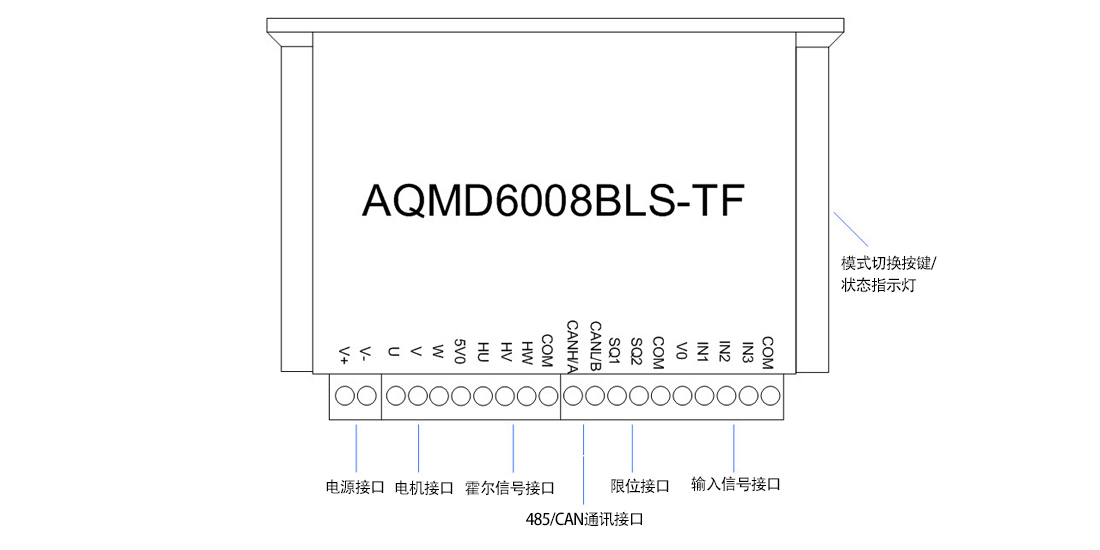
接口定义图
按键说明
操作方式 | 功能 | 说明 | 状态指示灯 |
短按一下 | 电机相序学习 | 学习成功 | 黄灯、绿灯交替闪烁6次后,同时常亮 1s |
学习失败 | 黄灯、绿灯交替闪烁6次后,黄灯再连续闪烁3次 | ||
按住 1s 后松开 | 切换控制方式 | 数字/模拟信号控制 | 黄灯常灭,绿灯以 0.5/2Hz频率闪烁 |
485 通讯控制 | 黄灯常亮,绿灯以0.5/2Hz频率闪烁 | ||
长按 5s 后松开 | 默认通讯参数通讯 | 波特率为9600bps,校验方式为偶校验,1位停止位 | |
典型用法、接线说明
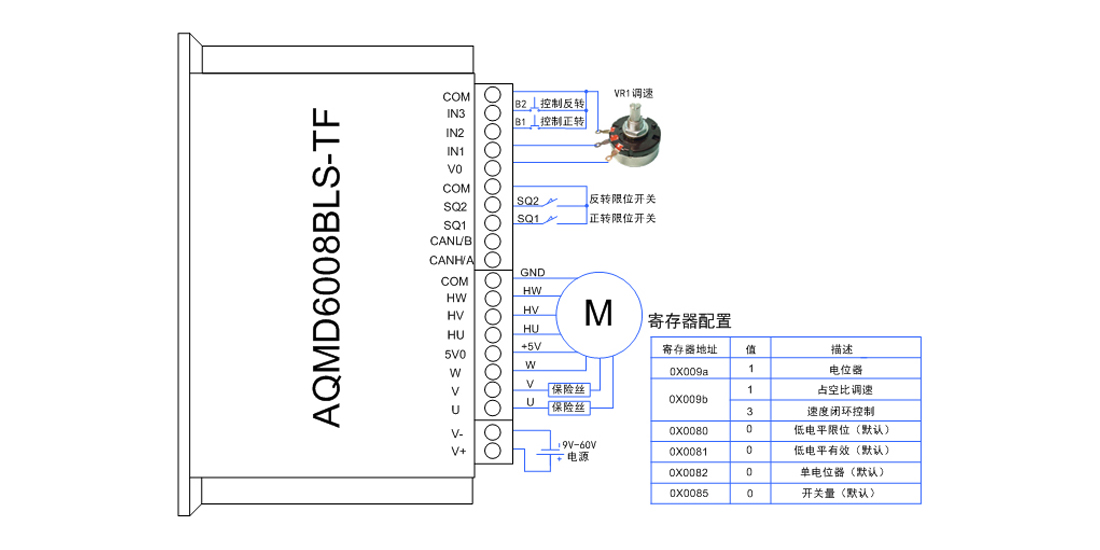
1. 单电位器占空比/闭环调速点动控制的接法,点动控制方式使用电位器调速的工作过程为:按下B1,电机正转,使用电位器调速;B1弹起,电机停止;当正转限位后电机停止,再按B1无效;按下B2,电机反转,使用电位器调速;B2弹起,电机停止;当反转限位时电机停止,再按B2无效。
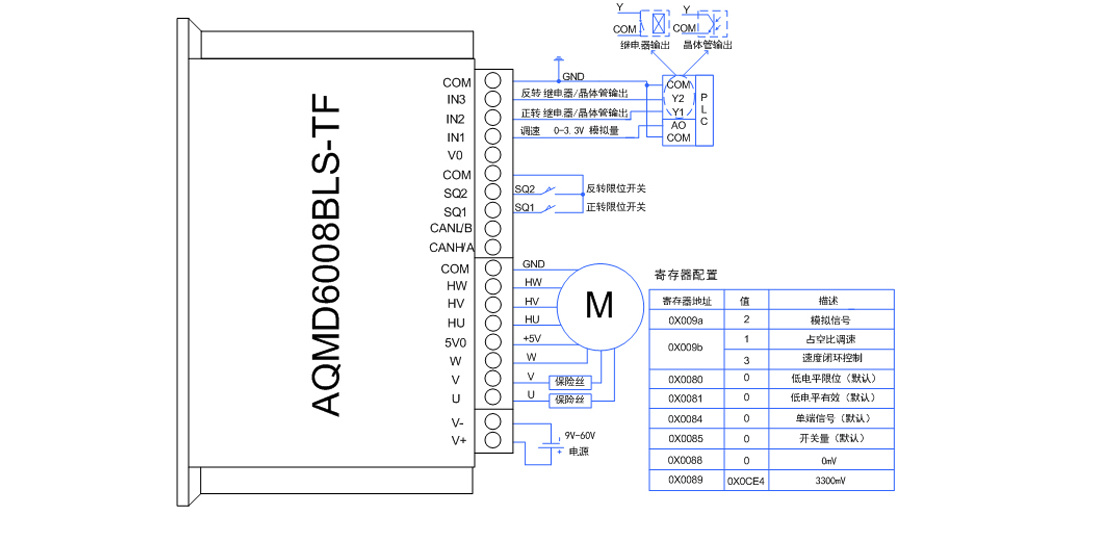
2. PLC模拟信号占空比/闭环调速的接法,此接法的工作过程为:IN1与PLC的AO端口连接,用于调速;IN2与PLC的Y2,控制电机方向;IN3与PLC的Y1连接,控制电机紧急停止。
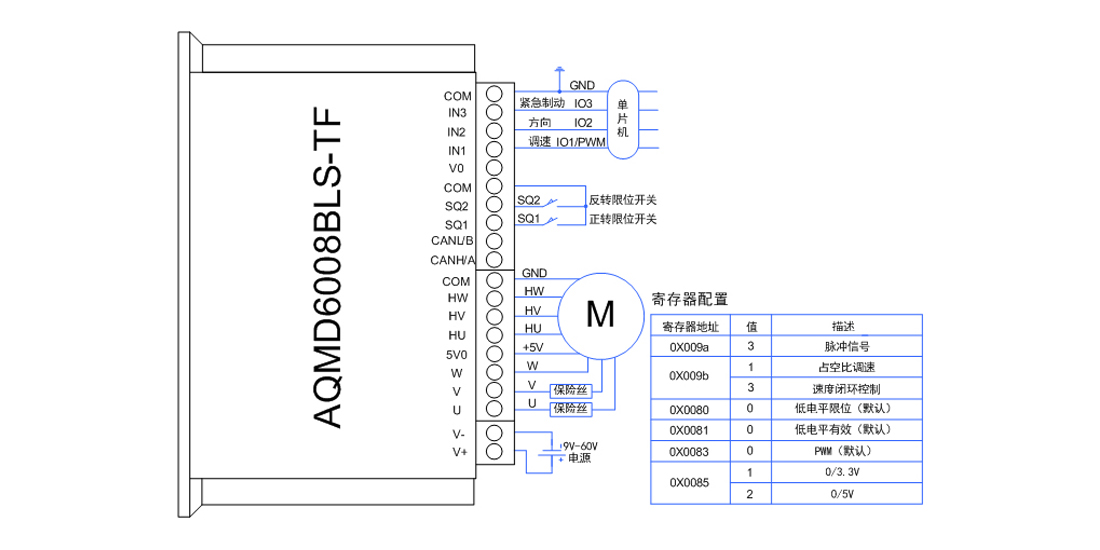
3. 单片机PWM信号占空比/闭环调速的接法,此接法的工作过程为:单片机的电源地接驱动模块的COM口;IN1脚接单片机的PWM的输出,用于调速;IN2和IN3与单片机的两个IO相连,控制电机正反转及紧急制动。
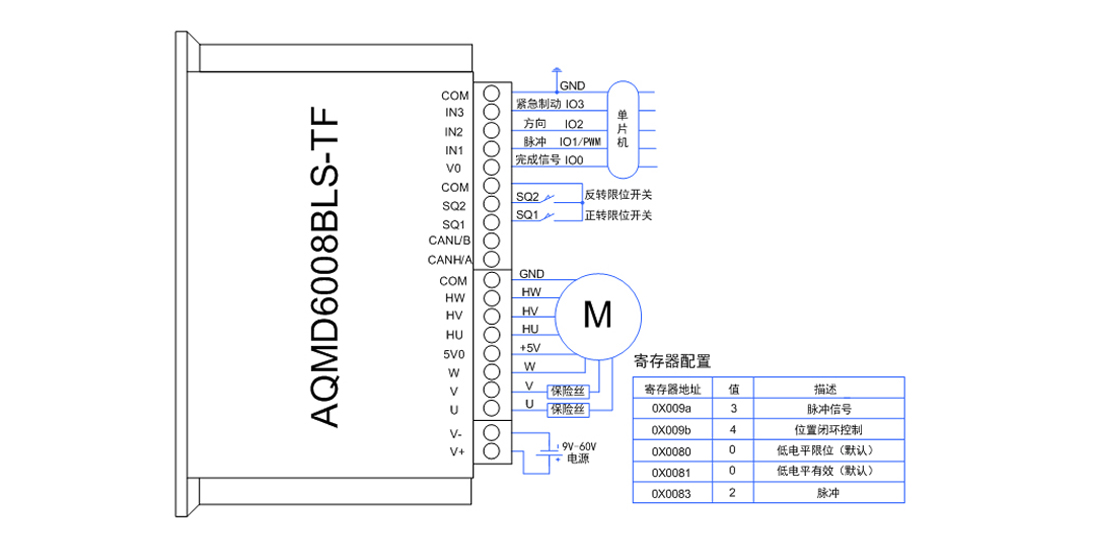
4. 单片机脉冲信号位置控制的接法:单片机的电源地接驱动模块的COM口;IN1与单片机的IO1相连,来确定脉冲的个数,用于电机位置控制;VO与单片机的IO0相连,用于完成信号控制;IN2和IN3与单片机的两个IO相连,控制电机正反转及紧急制动。
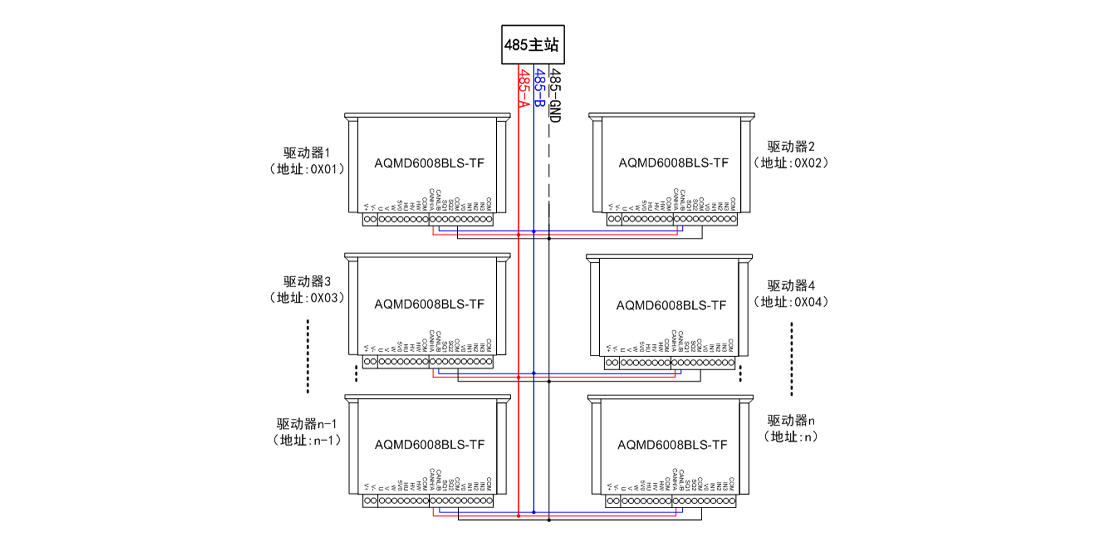
5. 485多站点控制的接法:每台驱动器的485通讯线按A-A、B-B的方式并联后跟一台485主站相连,485主站通过驱动器配置的从站地址来对每台驱动器独立操作。每一个驱动器配置的地址应唯一,不能与其它驱动器重复。
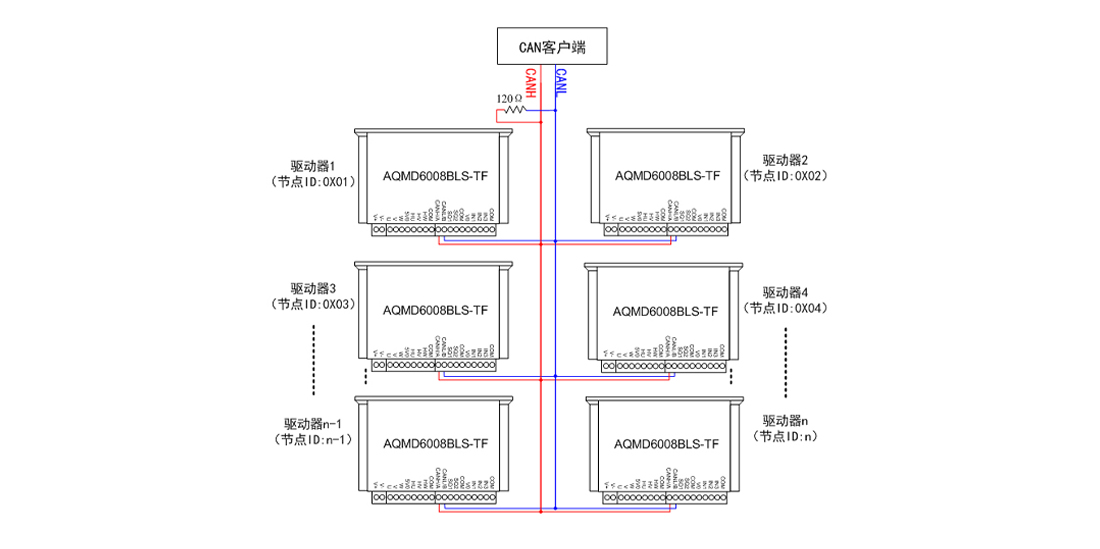
6. CAN多节点控制的接法:每台驱动器的CAN通讯线按CANH-CANH、CANL-CANL的方式并联后与CAN客户端相连,在CAN总线上至少并联一个120Ω的电阻,CAN客户端通过驱动器配置的节点ID来对每台驱动器独立操作。每一个驱动器配置的节点ID应唯一,不能与其它驱动器重复。
示例程序
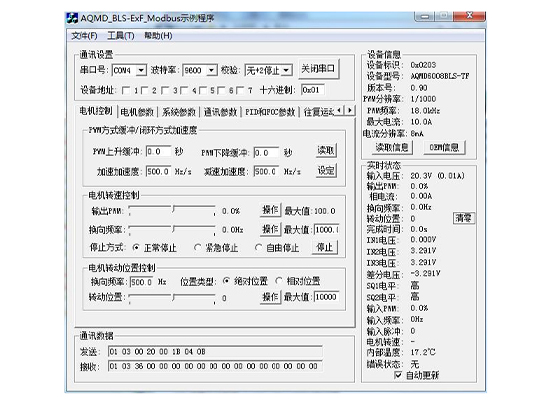
示例程序
提供PC机示例程序
可用来配置参数
调试电机或二次开发
附:选型参考
AQMD_BLS系列直流有感无刷电机驱动器选型表
| 型号 | 功能特点 | 最大适配 电机 | 最大电流/ 额定电流 | 能耗制动 最大电流 | 控制信号 | 产品尺寸 |
|---|---|---|---|---|---|---|
| AQMD2403BLS-M | ●极小尺寸 ●过热保护 ●过流保护 | 12V18W 24V-50W | 6A/3A | 3A,不可大电流频繁刹车换向 | 单/双电位器、0-3.3V 模拟信号、逻辑电平、开关、按键、PWM、脉冲、频率、RS485 | 45x45x18mm裸板 |
| AQMD3605BLS-B2 | ●过热保护 ●过流保护 | 12V-30W 24V-85W 36V-125W | 10A/5A | 3A,不可大电流频繁刹车换向 | 单/双电位器、0-3.3V 模拟信号、逻辑电平、开关、按键、PWM、脉冲/频率、RS485 | 70x65x2lmm裸板 |
| AQMD2408BLS-M | ●精巧尺寸 ●过热保护 ●过流保护 | 12V-45W 24V-130W | 16A/8A | 3A,非电池供电不可大电流频繁刹车换向 | 单/双电位器、0-3.3V 模拟信号、逻辑电平、开关、按键、PWM、脉冲/频率、RS485 | 55x55x17mm裸板 |
| AQMD3608BLS | ●导轨安装 ●过流保护 | 12V-50W 24V-135W 36V-200W | 10A/8A | 3A,不可大电流频繁刹车换向 | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM、脉冲/频率、RS485 | 92x87x30mm裸板 115x90x40mm塑料机壳 |
| AQMD6008BLS-T | ●精巧机壳 ●过热保护 ●过流保护 ●四象限运行 ●刹车电阻制动 | 12V-50W 24V-135W 36V-200W 48V-270W 60V-335W | 16A/8A | 3A | 单/双电位器、0-3.3V 模拟信号、逻辑电平、开关、按键、PWM、脉冲/频率、RS485 | 93x56x20.5mm 机壳 |
| AOMD6008BLS-TE/-I (485/CAN 兼容/隔离) | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | |||||
| AOMMD6008BLS-TF/-I (FOC 驱动方式) | ||||||
| AQMD6010BLS-B2 | ●过热保护 ●过流保护 ●刹车电阻制动 | 12V-60W 24V-170W 36V-250W 48V-335W 60V-420W | 20A/10A | 6A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485 | 136x82x45mm 铝合金机壳 |
| AOMD6010BLS-E2 (485/CAN 隔离) | ●过热保护 ●过流/短路保护 ●四象限运行 ●刹车电阻制动 | 20A/10A | 6A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 136x82x45mm 铝合金机壳 | |
| AOMD6010BLS-E2F FOC 驱动方式) | 8A | |||||
| AQMD6020BLS-E2/E3 (485/CAN 隔离/兼容) | ●过热保护 ●过流/短路保护 ●四象限运行 ●刹车电阻制动 | 12V-100W 24V-270W 36-400W 48V-540W 60V-670W | 35A/16A | 6A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 136x82x45mm 铝合金机壳 |
| AOMD6020BLS-E2F (FOC 驱动方式) | 8A | |||||
| AQMD6030BLS-E2/E3 (485/CAN 隔离/兼容) | ●过热保护 ●过流/短路保护 ●四象限运行 ●刹车电阻制动 | 12V-180W 24V-500W 36V-750W 48V-1000W 60V-1250W | 40A/25A | 12A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 136x82x45mm 铝合金机壳 |
| AQMD6030BLS-E2F (FOC 驱动方式) | ||||||
| AOMD6040BLS-E2 (485/CAN 隔离) | ●过热保护 ●过流/短路保护 ●四象限运行 ●刹车电阻制动 ●风扇散热 | 12V-240W 24V-670W 36V-1000W 48V-1350W 60V-1650W | 50A/35A | 20A | 单/双电位器、0-3.3/5/10V 模拟信号、0-3.3/5/24V逻辑电平、开关、按键、PWM、脉冲、频率、RS485/CAN通信 | 178x108x68mm 铝合金机壳 |
| AQMD6040BLS-E2F (FOC 驱动方式) | ||||||
| AQMD12H10BLS-E2 (控制信号全隔离) | ●过热保护 ●过流保护 ●四象限运行 ●刹车电阻制动 | 24V-200W 48V-400W 72V-600W 96V-800W 120V-1000W | 25A/12A | 6A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 136x82x45mm 铝合金机壳 |
| AOMD12H30BLS-E2 (控制信号全隔离) | ●过热保护 ●过流保护 ●四象限运行 ●刹车电阻制动 | 24V-500W 48V-1000W 72V-1500W 96V-2000W 120V-2500W | 45A/30A | 12A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 178x108x68m1 铝合金机壳 |
| AQMD22A04BLS-E2 (控制信号全隔离) | ●过热保护 ●过流保护 ●四象限运行 ●刹车电阻制动 | 72V-175W 110V-270W 310V-750W | 7A/3.5A | 3A | 单/双电位器、0-3.3/5/10V 模拟信号、逻辑电平、开关、按键、PWM/脉冲/频率、RS485/CAN | 136x82x45mm 铝合金机壳 |
安全保障
售后服务:我们提供全面的售后技术支持,若您在使用过程中遇到任何问题,专业的售后工程师团队将迅速响应,通过电话、邮件或远程协助等方式,为您提供详细的解决方案。我们还提供产品的定期回访,了解产品的使用情况,收集您的反馈意见,以便持续优化我们的产品和服务。此外,严格按照质保政策,对在质保期内出现质量问题的产品,提供免费维修或更换服务,让您无后顾之忧。