T1
11 Years
T1
11 Years





XIAOR GEEK ROS2 Educational Programmable Robot Car Kit
ROS2 Robotics Ackerman McNamee Wheel SLAM Build Map Navigation 3D Vision Programming Cart Jetson
USD: 999
ablity:Monthly Output200
- Deskripsi Produk
- Product Params
Deskripsi Produk
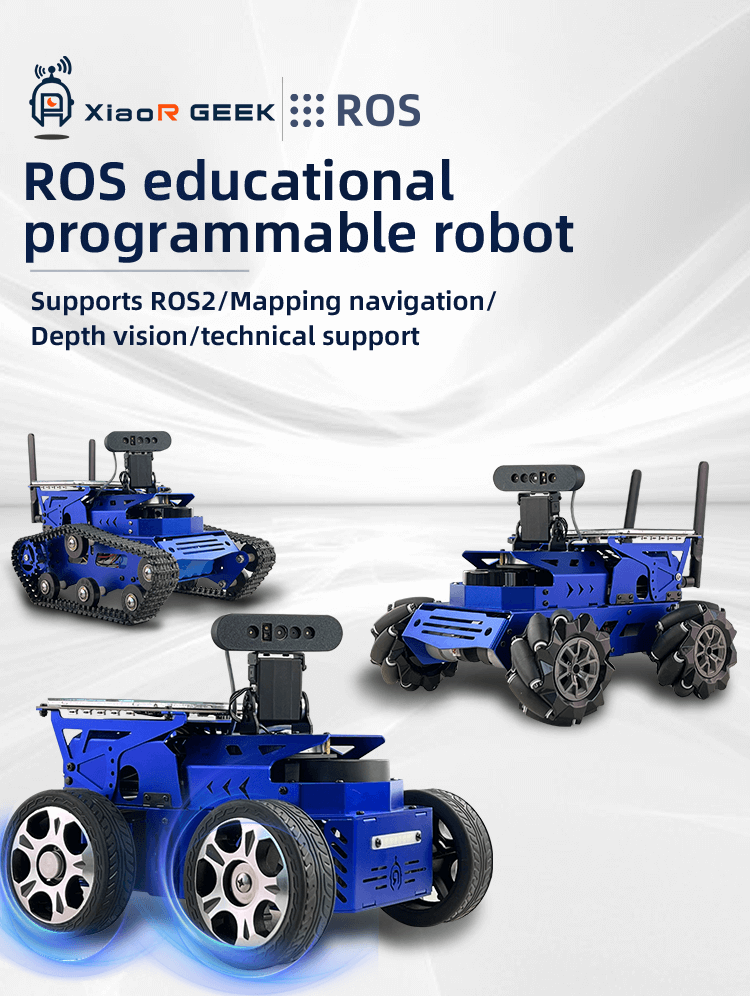
Product introduction
—————— -
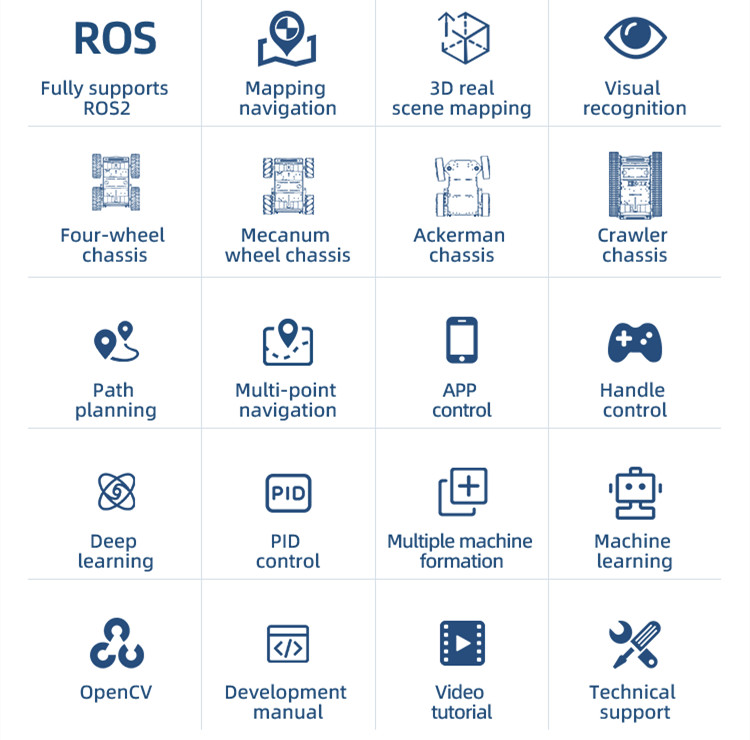
ROSHunter is a ROS robot car developed by XiaoR Technology for ROs educational programming.it is equipped with a series of high-performance hardware, including NVIDlA Jetson Nano, high-torque encoding reduction motor, lidar, 3D depth camera, 7-inch LCD screen, cool programmable lights and other hardware. These hardware configurations enable ROSHunter to realize the research and development and applications of robot motion control, ROSSLAM algorithm, mapping navigation path planning,deep learning,visual interaction and other aspects.
ROSHunter provides a variety of chassis to choose from and is fully adapted to the ROS2 system. This not only better meets users' learning and verification needs for robot SLAM functions, but also provides a fast and convenient integration solution for ROS development. In addition, the supporting ROS courses cover a wealth of technical information, functional source codes, course documents and explanation videos to help users quickly master the development and application of ROS robots.
Multiple chassis
to choose from
When exploring the world of ROS robots, users can choose from the following four models based on specific learning goals and practical application scenarios.Each model is carefully designed to provide the best learning experience andapplication performance for users of varying skill levels.

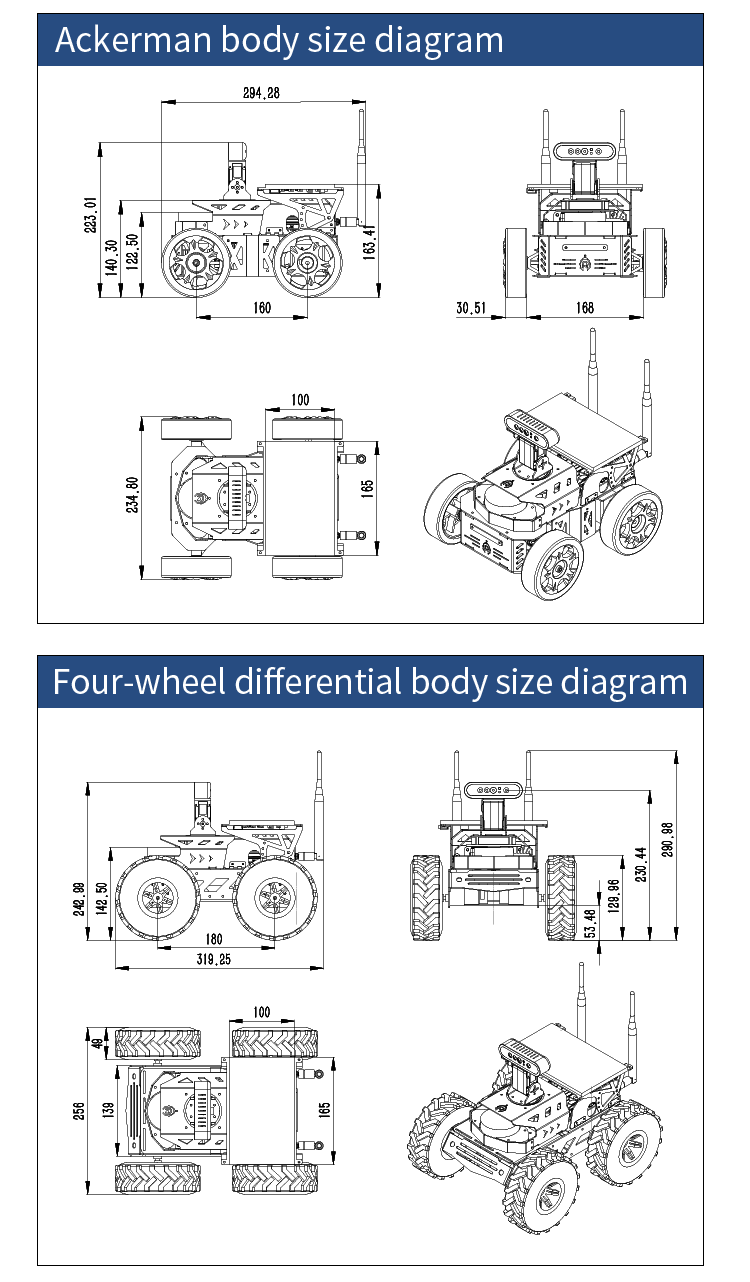
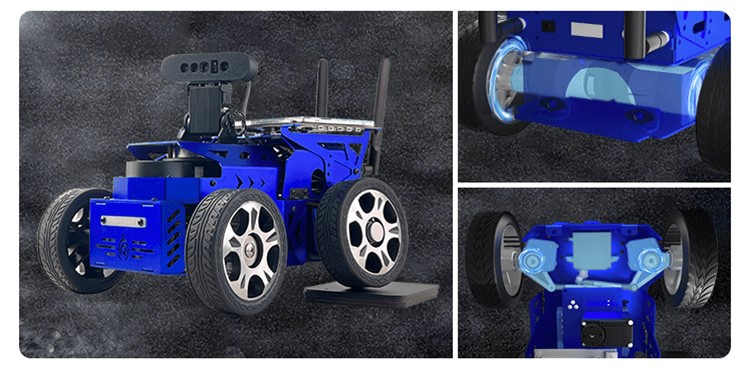
①Ackerman steering chassis -Front wheel steering, flexible control
Ackermann steering chassis, inherited from the standard steering architecture of modern automobiles,ware steering accuracy, navigation through the surprise angle adjustment of the front wheels, especially suitable for the study of vehicle driving dynamics with high simulation requirements
To optimize the stability of all four wheels in contact with the ground, the chassis is equipped with a grip suspension system on the rear wheels, a design that adapts to uneven road surfaces and ensures the accuracy of the motor encoder odometer measurements, The all-metal CNC precision manufacturing of the steering components provides durability and precision.
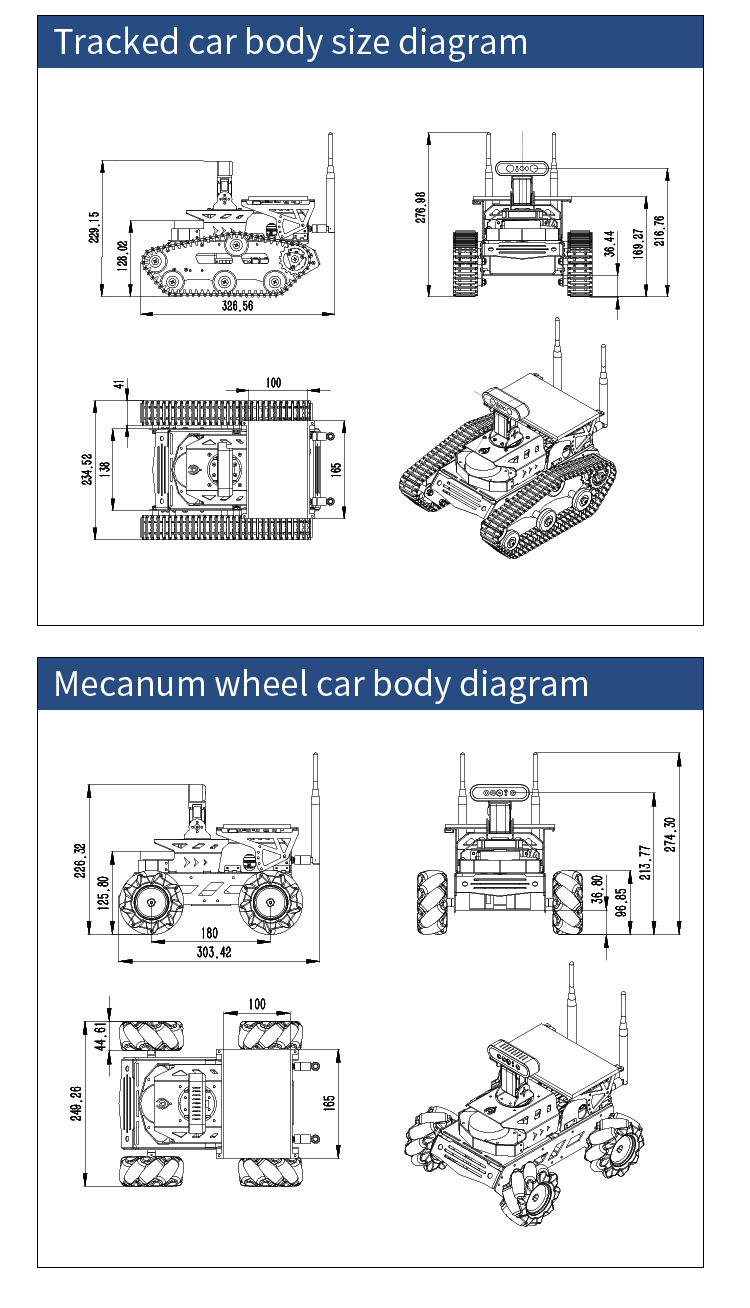
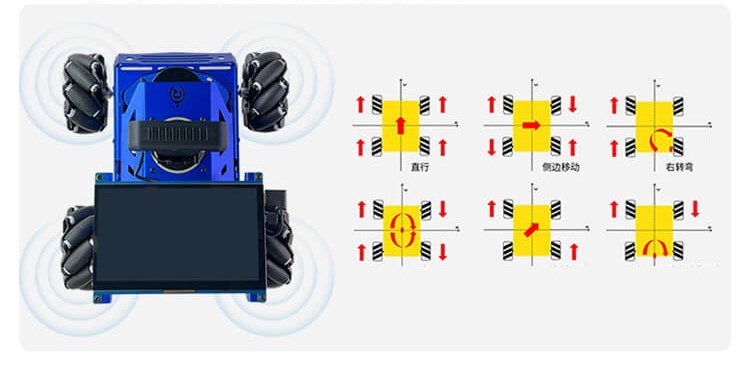
②Mecanum wheel chassis-Omnidirectional movement
The Mecanum wheel chassis gives the Ros robot 360° omnidirectional movement capabilities, enhancing its flexibility in narrow spaces. As an omnidirectional maneuverable structure, it is particularly suitable for complex application requirements for multi-angle operations.
③Tracked chassis
The tracked robot chassis enables the car to easily navigate various complex terrains due to its excellent adaptability and stability, Equipped with nylon caterpillar track and high-performance DC motors to ensure precise control and provide reliable support for transportation and other fields. lts flexible direction and angle adjustment optimizes the user's learning and development experience with the robot.

④4DW chassis-Differential speed drive
The four-wheel chassis controls steering through motor differential speed, providing the car with flexibility and easy operation, making it suitable for education and beginners.Equipped with 100mm diameter rubber wheels to ensure performance and high mobility, simplifying the mechanical structure while maintaining excellent performance.

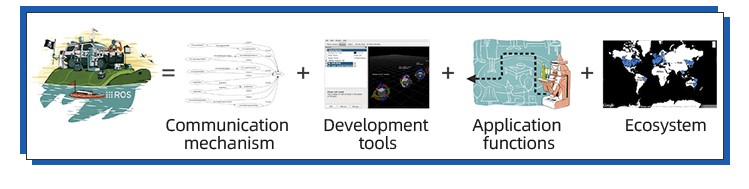
ROS Robot Operating System
Global mainstream robot communication framework
ROS (Robot Operating System) is an open source meta-level operating system suitable for robots.lt provides services similar to operating systems, including hardware abstract description, underlying driver management, execution of shared functions, inter-program message passing, and program distribution package management. its main goal is to provide code reuse support for robotics research and development.
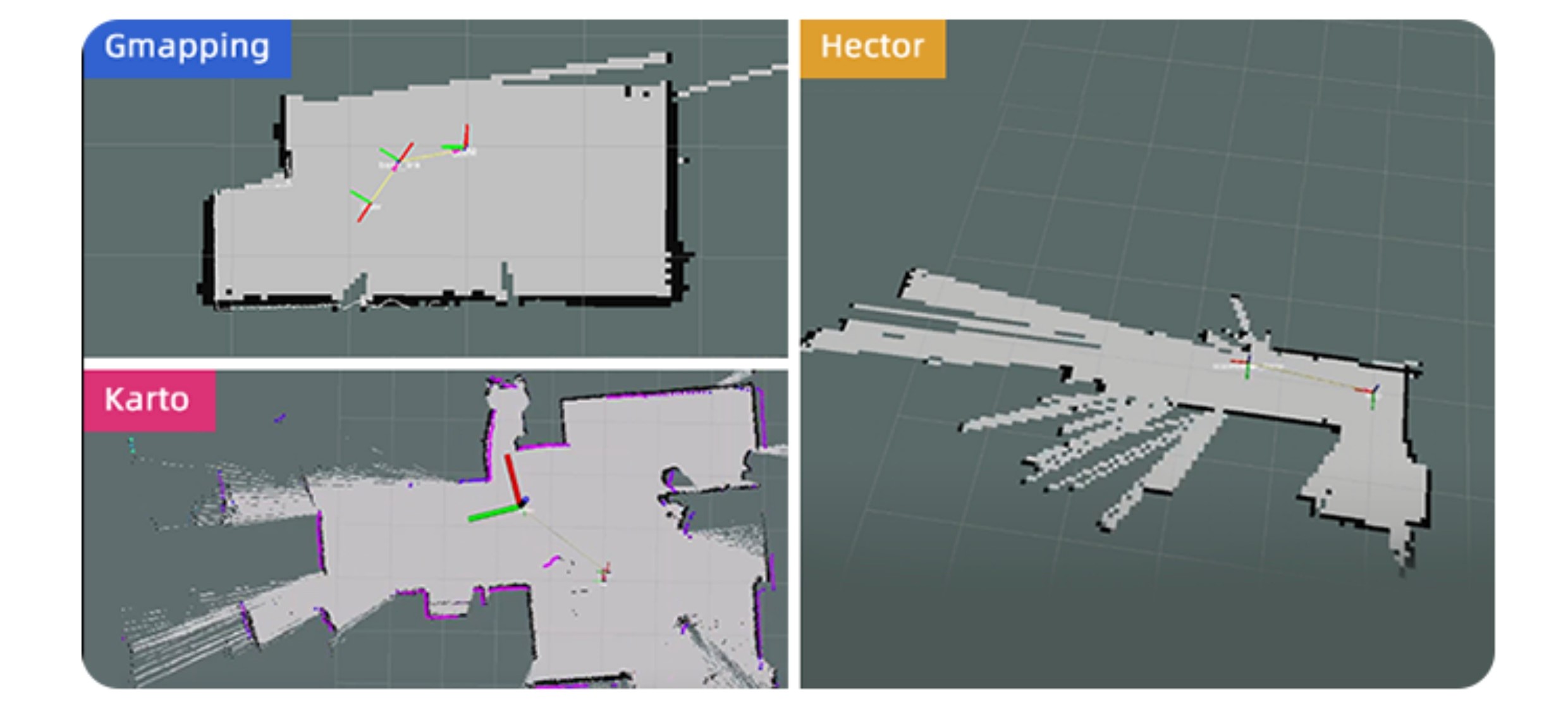
①Lidar mapping and navigation
SLAM algorithm mapping such as Gmapping, Karto, and Hector can be developed, and it supports path planning, fixed-point navigation, and multi-point navigation.
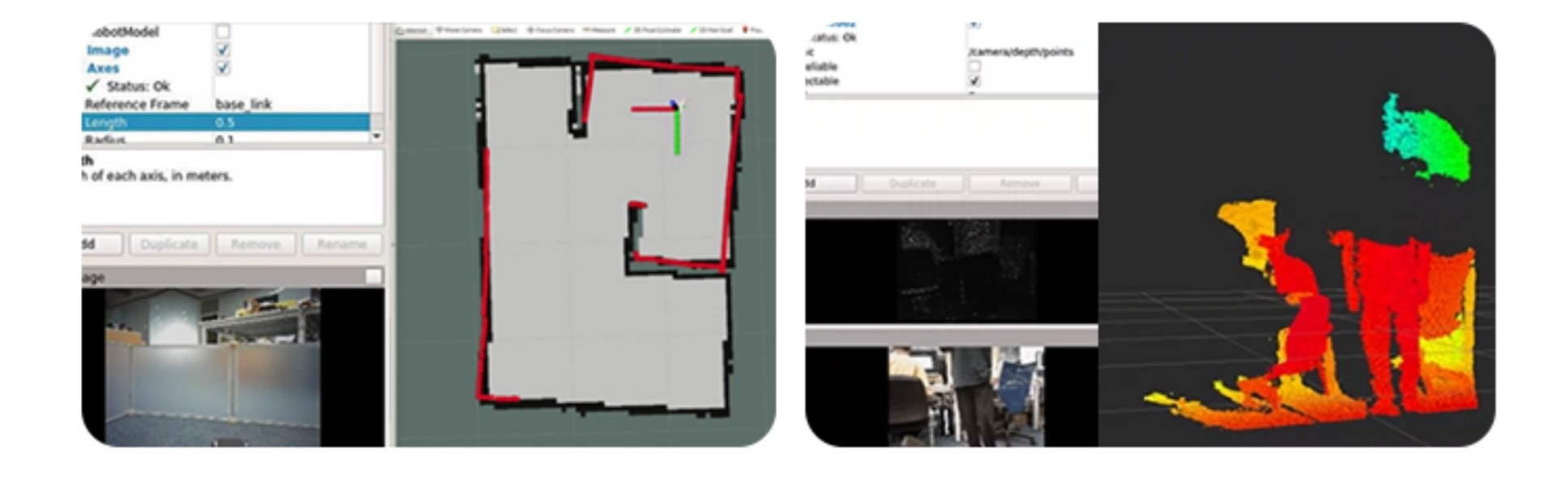
②RTAB-VSLAM 3D visual mapping navigation
The RTAB SLAM algorithm is used to fuse visual and radar data to construct a 3D colourful map. The robot can autonomously navigate and avoid obstacles in the map,and supports global relocation and autonomous positioning functions.
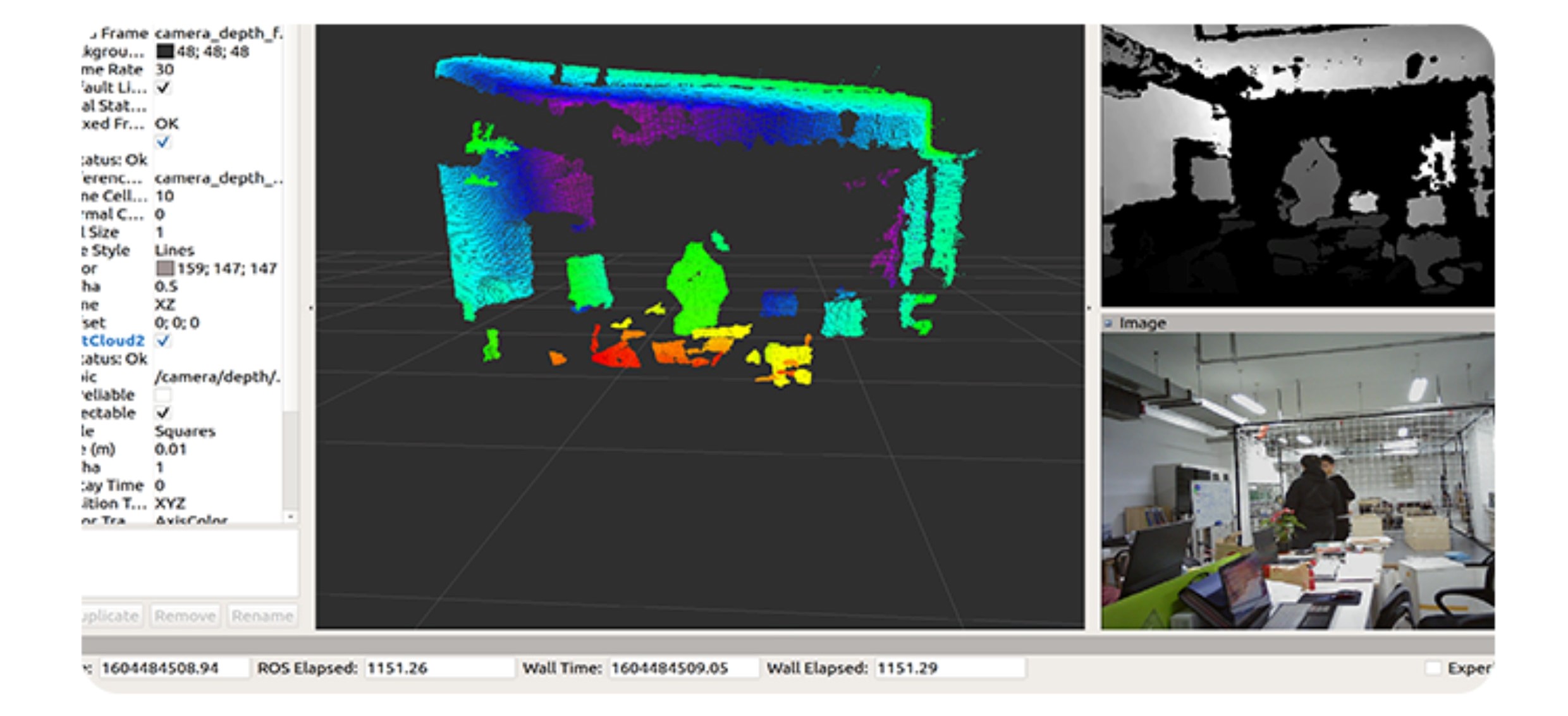
③Multi-point navigation, dynamic obstacle avoidance Lidar can detect the surrounding environment in real time and re-plan the path after detecting obstacles | ④Depth image data, point cloud image Through the corresponding APl, the camera's depth image, colourful image, and point cloud image data can be obtained |
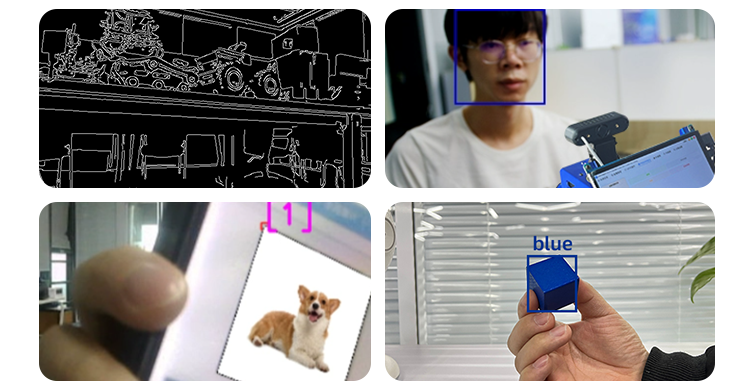
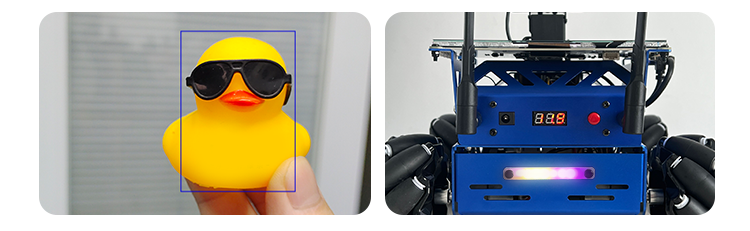
⑤Media Pipe development, machine vision processing
Using the MediaPpe development framework, functions such as face detection, edge detection, augmented reality, and color recognition can be achieved.
⑥KCF target tracking The image-based KCF correlation filtering algorithm can select any object in the image to achieve target following | ⑦RGB programmable car lights Ackerman, Mecanum wheel and four-wheel car body support 8 programmable RGB lights. |
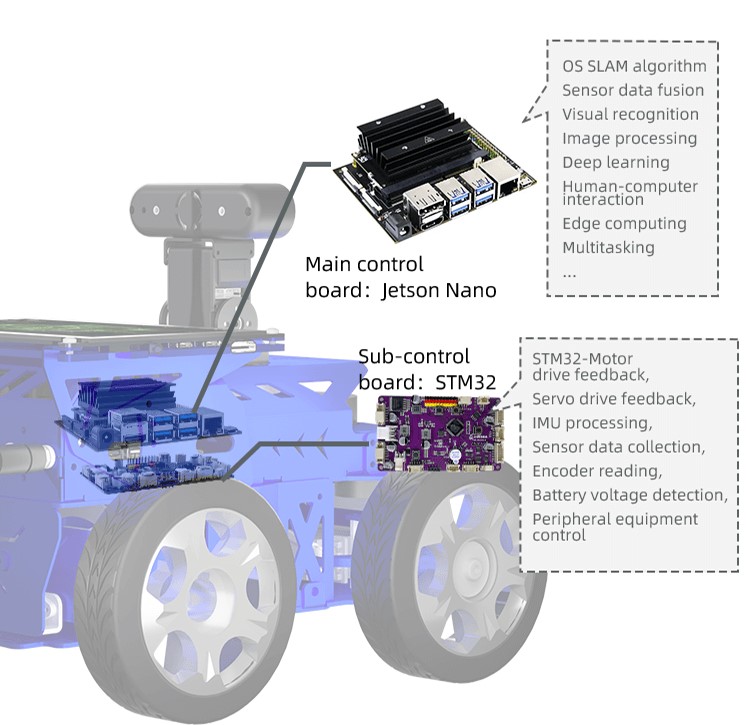
Dual-brain architecture collaboration,
Performance upgrade
Jetson Nano leads the ROS algorithm and visual processing, and STM32 is responsible
for motion control and sensor data processing. The intelligent division of labor
between the two achieves both performance and efficiency improvements.
Product parameters
—————— -
| Product type | ROSHunter SLAM Autonomous Navigation Visual Education Robot | |||
| Chassis type | Ackerman chassis | Mecanum wheel chassis | Tracked chassis | Four-wheel drive chassis |
| Product Size | 294*138*223 | 303*249*226 | 326*234*229 | 319*256*243 |
| Product weight | 3500g | 3000g | 3000g | 3050g |
| ROS master | Nvidia Jetson Nano
128-core NVIDlA MaxwellTM architecture GPU | |||
| Sub control panel | XR-PNL-4RL-32 | |||
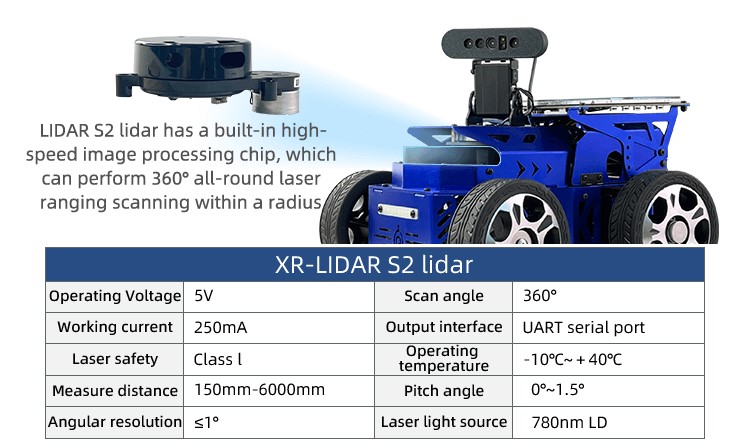
| Lidar | XR-LIDAR S2 | |||
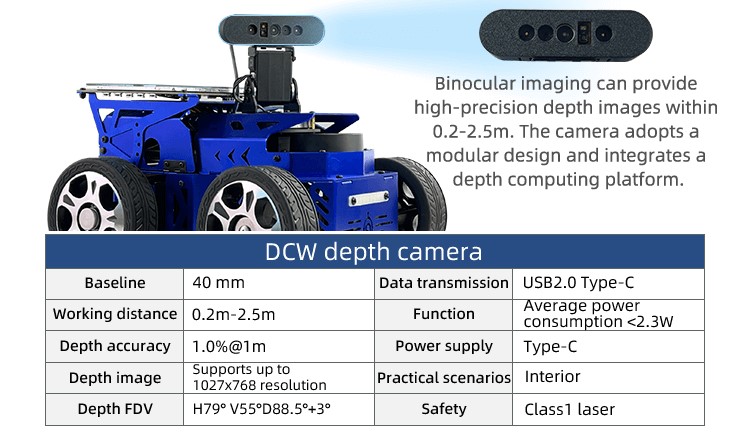
| Camera | DCW Depth Camera | |||
| Motor | XR520 permanent
magnet DC coded reduction motor | |||
| Battery | 10000mAh | |||
| Operating system | Ubuntu20.04LTS+ROS
Melodic | |||
| Communication method | USB/WiFi/Ethernet | |||
| Remote control method | Mobile APP/Wireless
handle/PC | |||
| Programming Tools | Python /C/C++
/JavaScript | |||
| Storage | 64GB TF card | |||
| Body material | All-metal aluminum
alloy chassis | |||
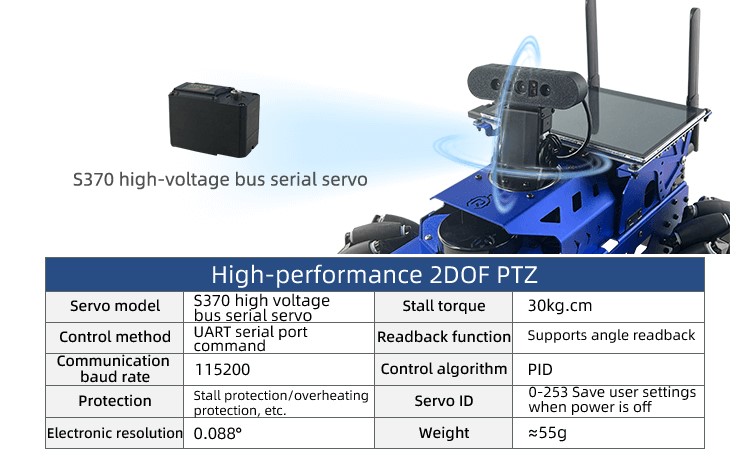
| Steering servo | S015M 15KG metal
shaft servo(Ackerman version) | |||
| Car lights | 8 RGB lamp beads | |||
①All series are equipped with depth cameras as standard
②LiDAR
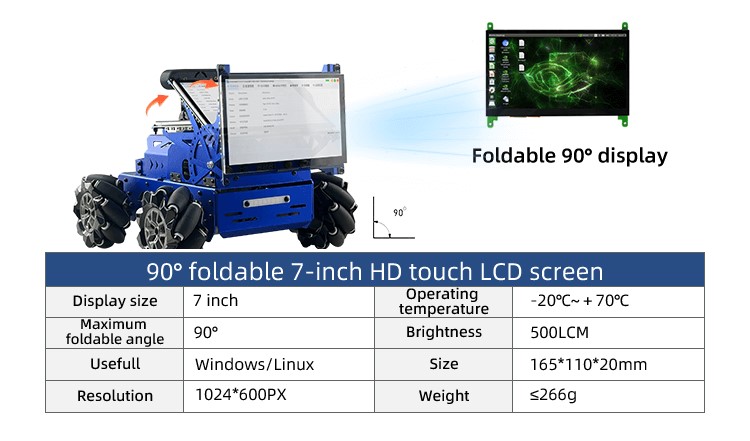
③Standard 7-inch display
④High-performance 2DOF PTZ