T1
11 Years
T1
11 Years





XIAOR GEEK ROS2 教育可编程智能机器人汽车套件
ROS2机器人阿克曼麦克纳姆轮SLAM建图导航3D视觉编程小车Jetson
CNY: 5190
ablity:Monthly Output200
- Mô tả sản phẩm
- Product Params
Mô tả sản phẩm

产品简介
———— -
ROSHunter是小R科技面向ROS教育编程开发的ROS机器人小车,它配备了一系列高性能硬件,包括NVIDIA Jetson Nano、大扭力编码减速电机、激光雷达、3D深度相机、7寸液晶显示屏、酷炫可编程车灯等硬件。这些硬件配置使得ROSHunter能够实现机器人运动控制、ROS SLAM算法、建图导航路径规划、深度学习、视觉交互等多方面的开发与应用。
ROSHunter提供多种底盘供选择,全面适配ROS2系统,这不仅可以更好地满足用户对机器人SLAM功能的学习和验证需求,还为ROS开发提供了快速便捷的集成方案。此外,配套的ROS课程涵盖了丰富的技术资料、功能源码、课程文档和讲解视频,帮助用户迅速掌握ROS机器人的开发与应用。

多种底盘 随心选择
在探索ROS机器人的世界时,可以根据特定的学习目标和实际应用场景从四种车型中选择。每款车型都是精心设计,旨在为不同技能水平的用户提供最佳学习体验和应用性能。

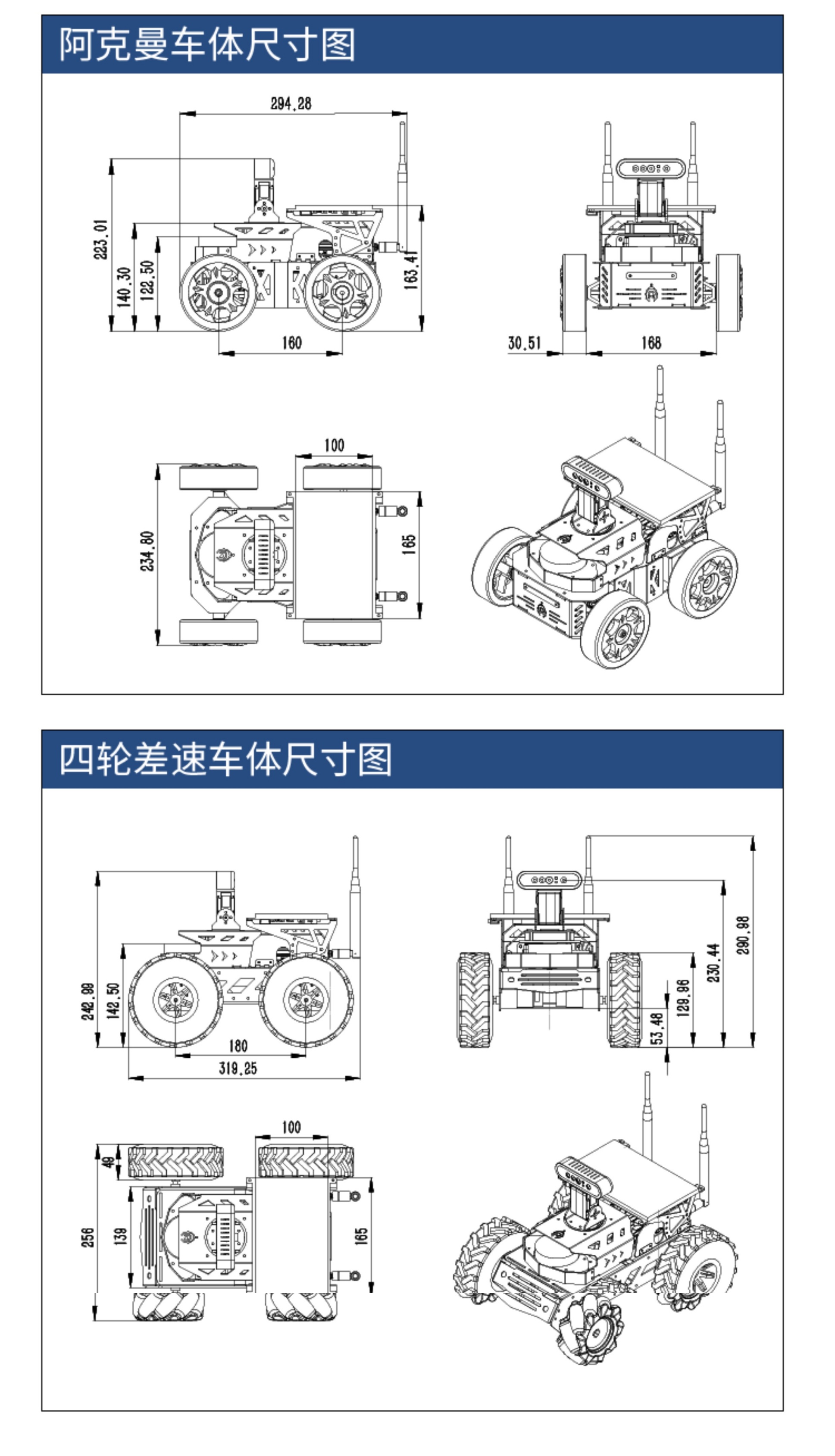
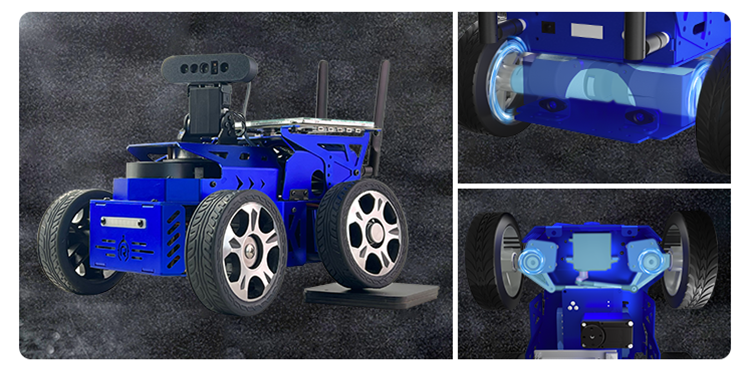
①阿克曼转向底盘 前轮转向 操控灵活
阿克曼转向底盘,继承了现代汽车的标准转向架构,其转向精确性,通过前轮的精细角度调整来导航,特别适宜于对车辆行驶动态有高仿真需求的研究。
为了优化四轮接触地面的稳定性,底盘的后轮装备了摆式悬挂系统,这一设计能够适应不均匀路面,确保电机编码器里程计的测量准确性.其转向部件的全金属CNC精密制造,提供了耐用性与精度。
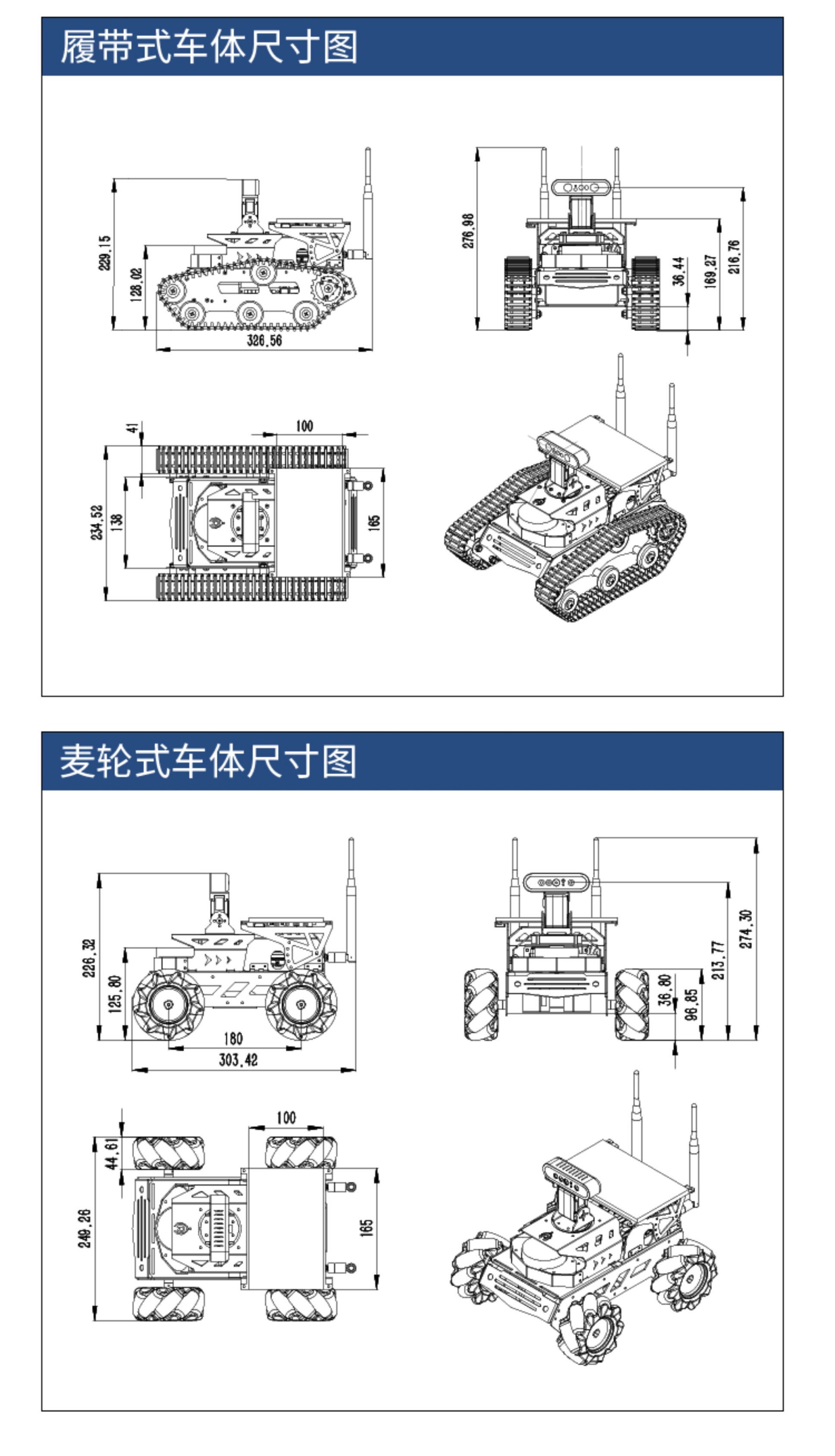
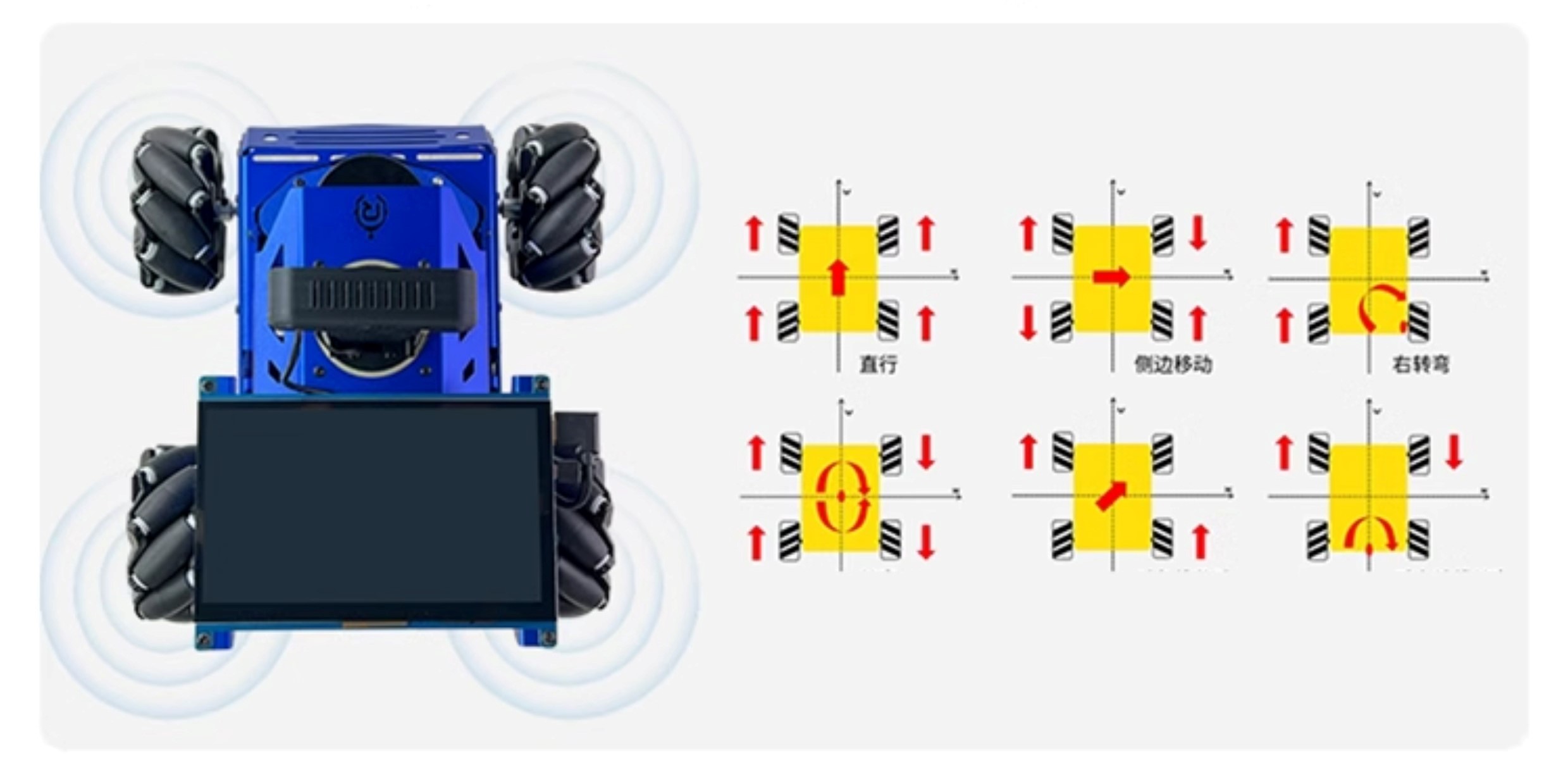
②麦克纳姆轮底盘 全向移动
麦克纳姆轮底盘赋予ROS机器人360度全向移动能力,增强其在狭窄空间的灵活性。作为全向机动的结构,特别符合多角度操作的复杂应用需求。
③履带式底盘
履带式机器人底盘凭借卓越适应性与稳固特性,轻松驾驭各类复杂地形。搭载尼龙履带及高性能直流电机,保证精确操控,为运输等领域提供可靠支持。其灵活的方向与角度调节,优化了机器人的学习与开发体验。

④四轮驱动底盘 差速驱动
四轮底盘通过电机差速控制转向,提供灵活性与简易操作,适合教育及初学者。搭载100mm直径橡胶轮,确保小形变与高移动性,简化机械结构的同时保持优异性能。

ROS机器人操作系统
全球主流机器人通讯框架
ROS(Robot Operating System)是一个适用于机器人的开源的元级操作系统。提供了类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理。它的主要目标是为机器人研究和开发提供代码复用的支持

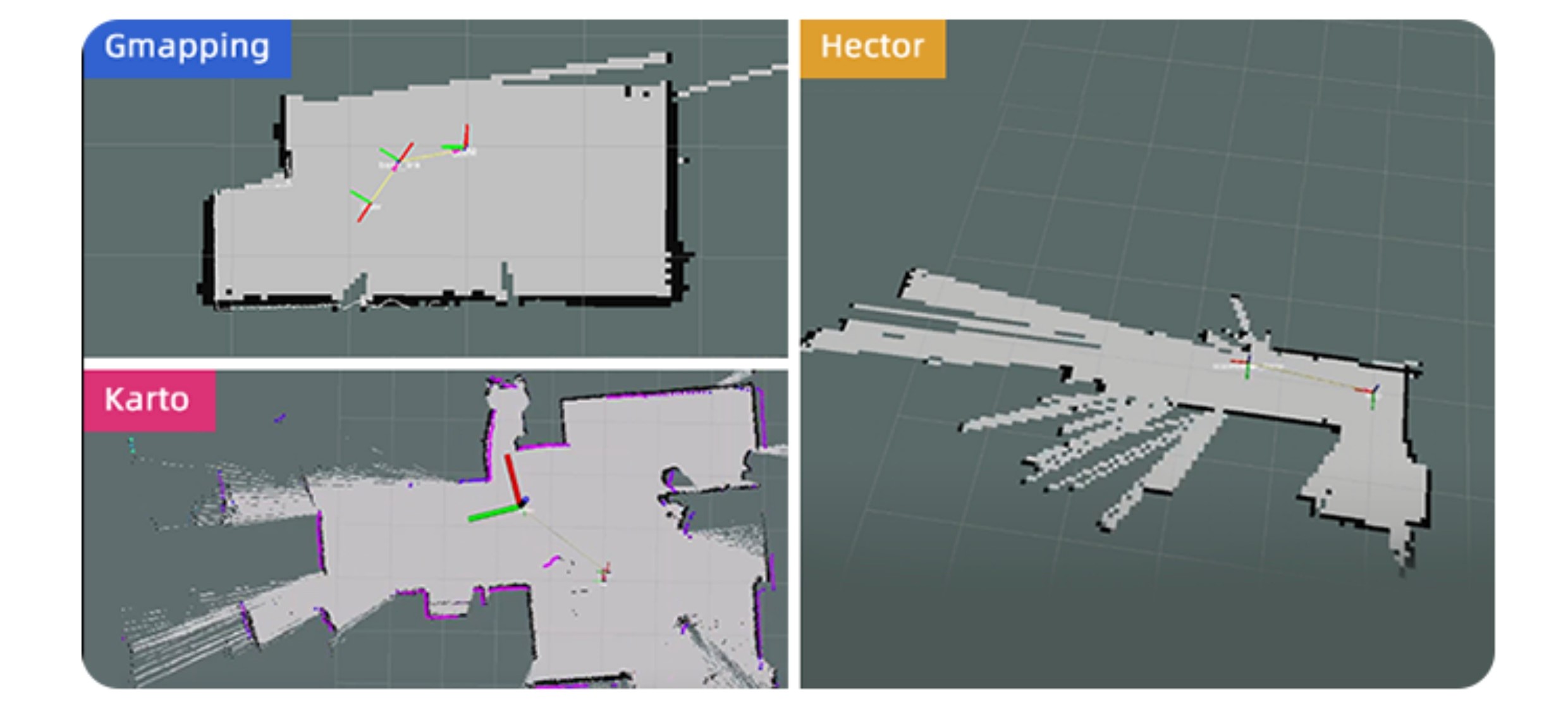
①激光雷达建图导航
可开发Gmapping、Karto、Hector等SLAM算法建图,并支持路径规划、定点导航、多点导航。
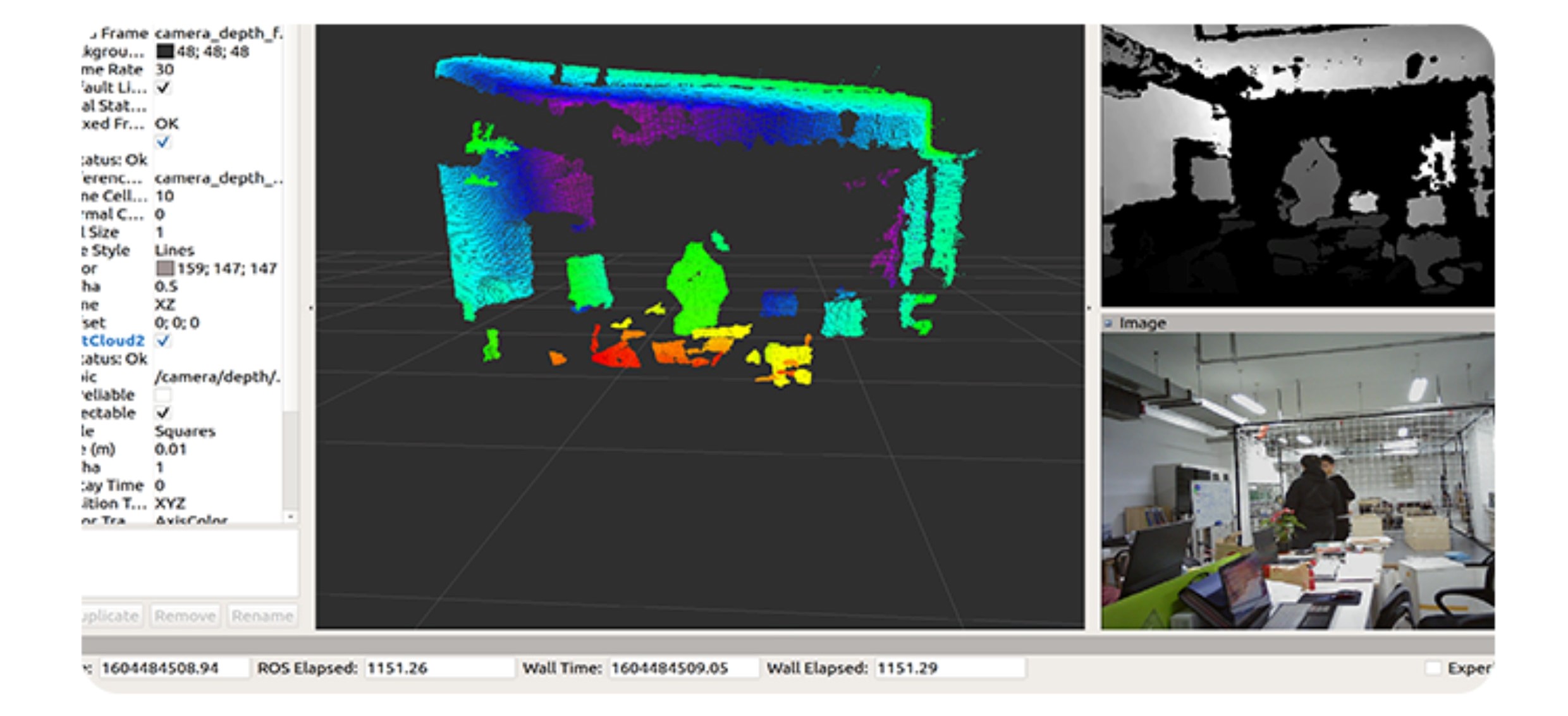
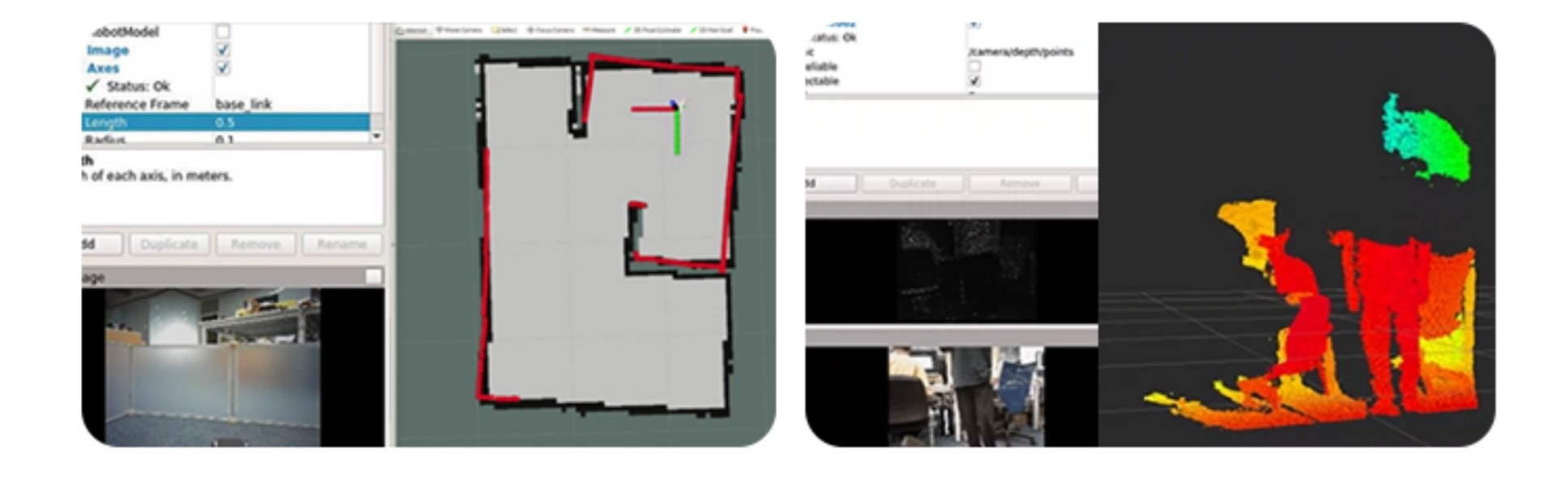
②RTAB-VSLAM三维视觉建图导航
运用RTAB SLAM算法,融合视觉和雷达数据构建三维彩色地图,机器人在地图中可自主导航和避障,支持全局重定位,自主定位功能。
③多点导航动态避障 激光雷达可实时探测周围环境, 并在检测到障碍物后将重新规划路径。
| ④深度图像数据 点云图像 通过相应的API,可获取相机的深度图像、彩色图、点云图数据。 |
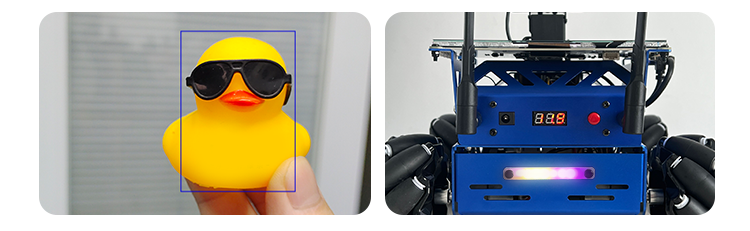
⑤MediaPipe开发,机器视觉处理
运用MediaPpe开发框架,可以实现人脸检测、边缘检测、增强现实、颜色识别等功能。
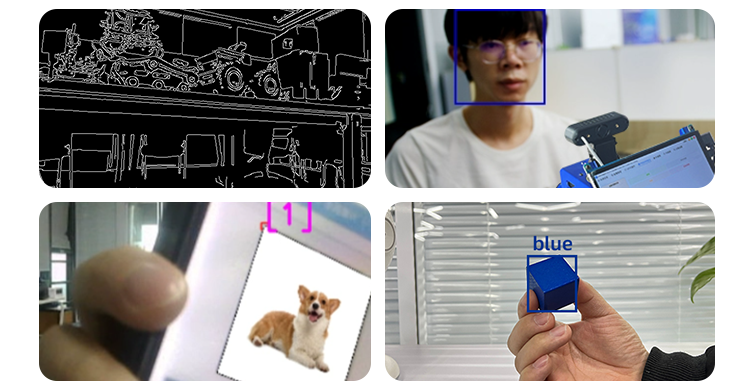
⑥KCF目标追踪 基于图像的KCF相关滤波算法,可选定图像中任意物体,实现目标跟随。 | ⑦RGB可编程车灯 阿克曼、麦克纳姆轮、四轮车体支持8颗可编辑RGB车灯。 |
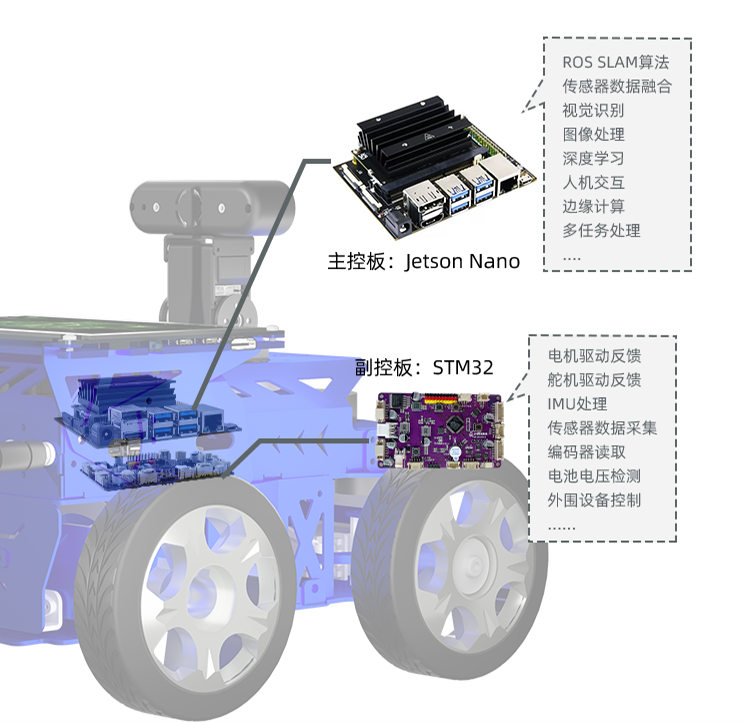
双脑架构协作 性能升级
Jetson Nano主导ROS算法与视觉处理,STM32负责动作控制
与传感器数据处理。两者智能分工,实现性能与效率双提升
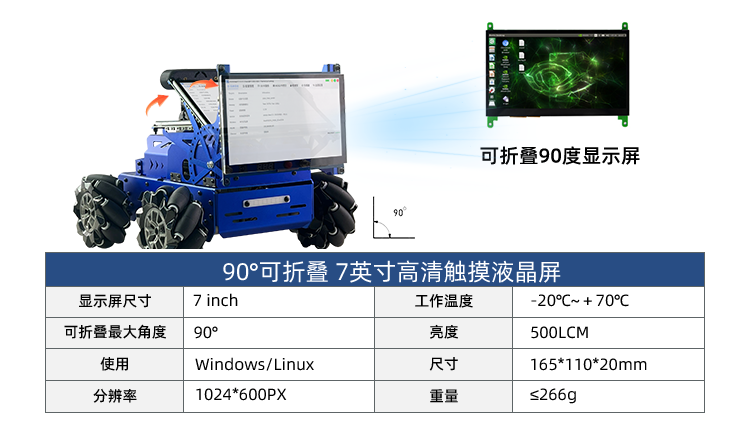
人体工程学设计 拓展视界
———— -
得益于我们创新的联动设计,机器车与同类产品的显示屏不同,实现了屏幕角度的无极调节能力,支持从0到90度的自由折叠,旨在提供倾斜的视觉体验。这种设计提供了灵活的角度调整,可轻松找到更符合人体工程学的最佳使用角度。

ROS 易用人工智能交互
———— -
机器车搭载了小R科技自主开发的“XR-ROS人机交互系统”使得用户能够实时监控机器人的状态和各类信息。借助该系统,无需依赖命令行或其他复杂的操作手段,用户即可轻松地进行交互和管理。

操作方式
———— -
 |  | |
手机APP遥控 支持手机APP操控机器人,搭配虚拟机,可实现在多种场景下的应用。 | 无线手柄控制 标配无线操控手柄,可实现对机器人的移动及云台操作的控制。 |
产品参数
———— -
| 产品型号 | ROSHunter SLAM自主导航视觉教育机器人 | |||
| 底盘类型 | 阿克曼底盘 | 麦轮底盘 | 履带底盘 | 四轮驱动底盘 |
| 产品尺寸(mm) | 294*138*223 | 303*249*226 | 326*234*229 | 319*256*243 |
| 产品重量 | 3500g | 3000g | 3000g | 3050g |
| ROS主控 | Nvidia Jetson Nano 128核NVIDIA MaxwellTM架构GPU | |||
| 副控板 | XR-PNL-4RL-32 | |||
| 激光雷达 | XR-LIDAR S2 | |||
| 摄像头 | DCW深度相机 | |||
| 电机 | XR520永磁直流带编码减速电机 | |||
| 电池 | 10000mAh | |||
| 操作系统 | Ubuntu20.04LTS+ROS Melodic | |||
| 通信方式 | USB/WiFi/以太网 | |||
| 控制方式 | 手机APP/无线手柄/PC | |||
| 编程工具 | Python /C/C++ /JavaScript | |||
| 存储 | 64GB TF卡 | |||
| 机体材料 | 全金属铝合金底盘 | |||
| 转向舵机 | S015M 15KG金属轴舵机(阿克曼版本) | |||
| 车灯 | 8颗RGB灯珠 | |||

②激光雷达

③标配 7英寸显示屏
④高性能二自由度云台