



Product Description

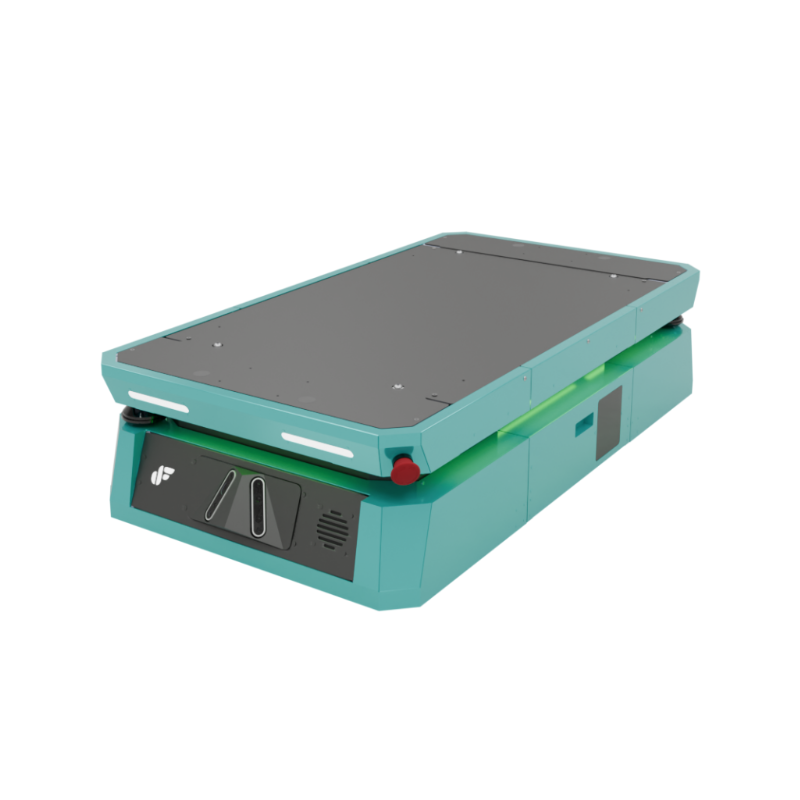
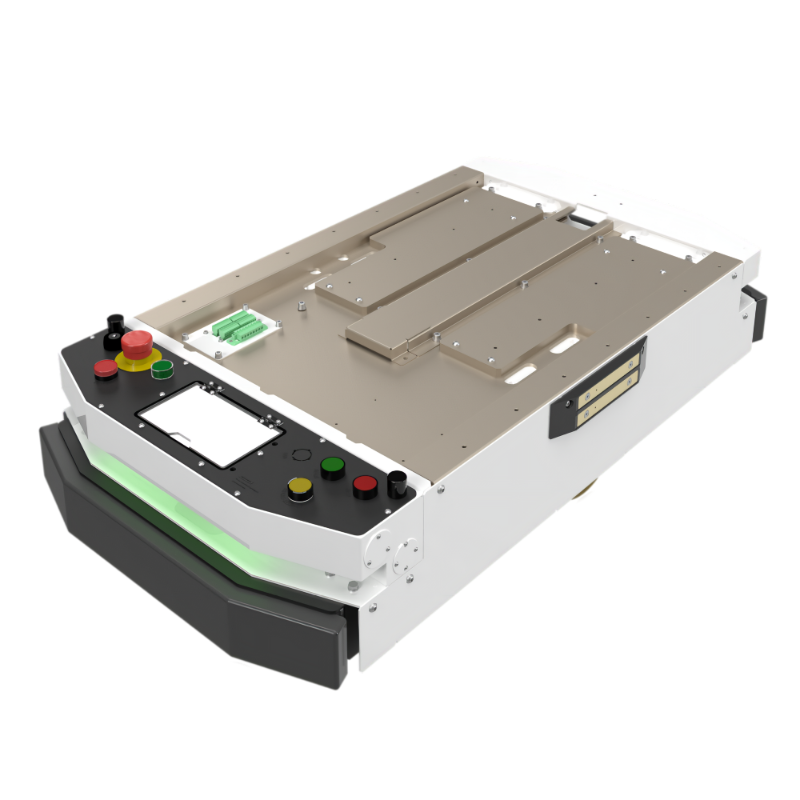
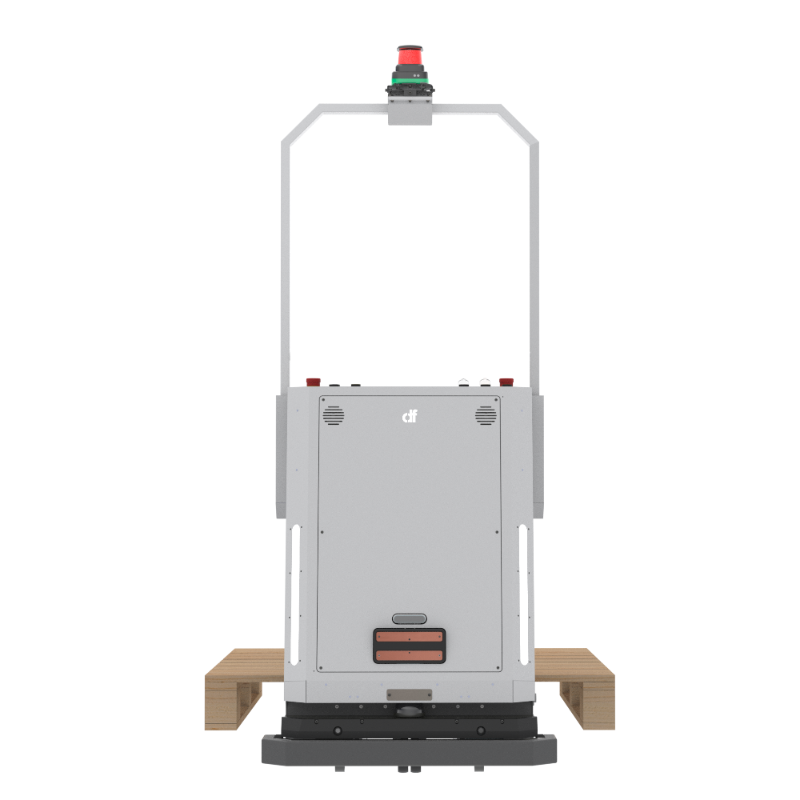
Zetha Series Standard 1 Tonne Trackless AMR is an advanced mobile robot conceived to transport palletized loads that allow the movement of the load in floor-to-floor operations. The LiDAR sensor enables the AMR to navigate around without any physical guide, the natural environment being the virtual guide, hence promoting hassle-free in setup, programmed and implementation.
It is suitable for (not limited to) manufacturing, warehousing, logistic, textile, automotive, food & beverage, etc.
Product Features
1 | SIL3 Safety
Designed in accordance with current
safety regulation ISO3691-4

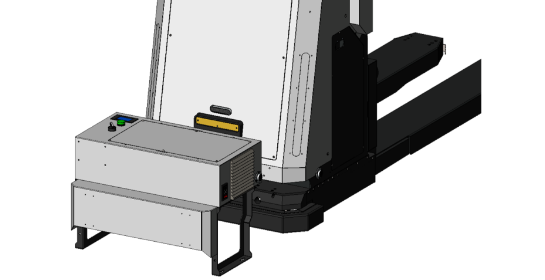
2 | Pallet Handling
Transport of pallets and heavy objects
is made possible by the high payload

3 | High Payload
Able to handle load up to 1000kg
with a lifting height of 90mm

4 | Optimum Operation
With 3 hours charging, ZETHA can achieve 12 HOURS running time
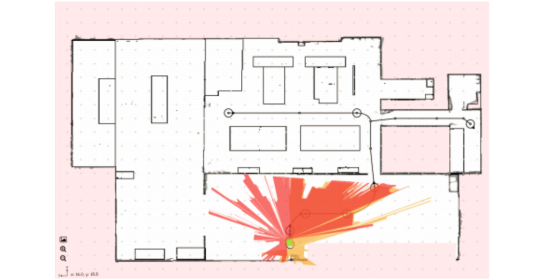
5 | NavWiz Map
Allow user to draw and plan topological map for ZETHA
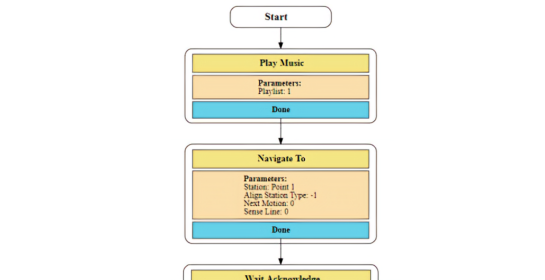
6 | NavWiz Task
Software programming is easy by using simple flowchart system
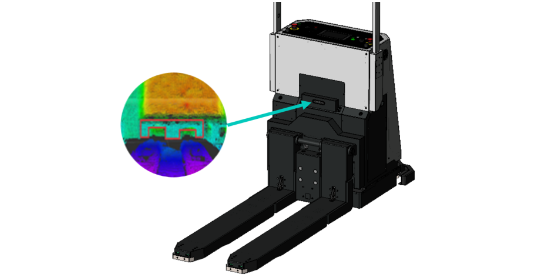
7 | 3D Camera
3D Camera(s) are able to perform both Pallet Detection and Obstacle Detection
8 | Auto Charging
Automatically charge itself to ensure 24-hour continuous operation
9 | Internet of Thing
With remote assistant support ZETHA is IoT – enabled to meet industry 4.0 requirements
Product parameters
Dimension | |
Length | Bumper-to-Bumper: 1956 mm |
Width | Body: 670 mm Bumper-to-Bumper: 780 mm |
Height | 2012 mm (Minimum) 2162 mm (Maximum) |
Clearance from Ground | 10 mm |
Fork Clearance from Ground | 19 mm |
Load Surface | Length: 1200 mm Width: 572 mm l Total coverage area of the forks |
Fork Width | 197 mm |
Fork Spacing | 178 mm |
Fork Height (Before Lifting) | 95 mm |
Driving Wheel | Diameter: 80 mm, Width: 55 mm |
Main Caster Wheel | Diameter: 75 mm, Width: 39 mm |
Lifting Height | 90 mm |
Lifting Payload | 1000 kg l Rated load include pallet weight |
Recommended Pallet Specification | |
Pallet Minimum Opening Width | 205 mm |
Pallet Minimum Opening Height | 100 mm |
Pallet Center Rib | Minimum : 80 mm Maximum : 150 mm |
Pallet Side Rib | Minimum : 80 mm Maximum : 150 mm |
Driving and Navigation | |
Driving System | 2-Wheel Differential Drive |
Navigation System | Hybrid Forward Motion l With MSB module added as an accessories |
Navigation Direction | Forward, Reverse, Turning around center of two driving wheels |
Suspension | Fixed |
Minimum Turning Radius | 0 mm |
Minimum Width for Pivoting | 2655 mm l Rotate 360 degree around the center of the robot |
Minimum Safety Clearance of Width | 500 mm l Based on EN1525 l On both sides of robot |
Minimum Safety Clearance of Height | 2100 mm l Based on EN 1525 l Above robot |
Performance | |
Maximum Speed | 1.0 m/s (3.6km/h) l With rated payload l Travelling max speed with rated payload (on site) is recommended to undergo Risk Assessment as well |
Acceleration | 0.1m/s2 l With rated payload |
Stopping Accuracy | Laser Sensor (Natural Feature):±50mm ± 2° Laser Sensor (Marker/Docking): ±10mm ± 1° l Speed before stopping 0.13 m/s (8m/min) |
System | |
Running Time (90% to 10%) | 12 hours |
Charging Time (10% to 90%) | 3 hours |
Charging Time: Running Time Ratio | 1:4 l With rated payload |
Charging Method | Manual Charge: Through cable l Safety brake will be triggered Auto Charge: Dock charging through charging station |
Battery Type | LiFePO4 |
Battery Weight | 21 kg |
Battery Voltage | 25.6 V |
Battery Capacity | 130 Ah |
Safety and Interface | |
Features | Bumper x 3 Units Emergency Switch x 2 Units Ultrasonic Sensor x 2 Units 3D Camera x 2 Units |
Safety Laser Scanner | 1 Unit l Front l Range: Configurable protective field range of 3 m radius l Performance Level: PLd (EN ISO 13849) l Combined Field of View: 275° |
Safety Indicators | RGB LED Lighting at the front, Music playback & Alarm |
Operating System | NavWiz |
Language | English |
User Interface | 7″, 1024 x 600 IPS HDMI Capacitive Touch Monitor Physical Buttons |
Communications | 802.11 a/b/g/n, 2.4GHz / 5GHz WiFi Open WiFi WPA & WPA2 Personal WPA & WPA2 Enterprise |
Central Control System | IPC Intel i5 |
Environment | |
Ambient Temperature Range | 0 ~ 40°C |
Humidity | 45 ~ 70 % l @ 40°C (Non-condensing) |
Operating Environment | Indoor usage only, with no excessive dust or corrosive gases |
Floor Requirement | Level surface or concrete l no water, no oil, no dirt |
IP Class | IP 20 |