














Product Description
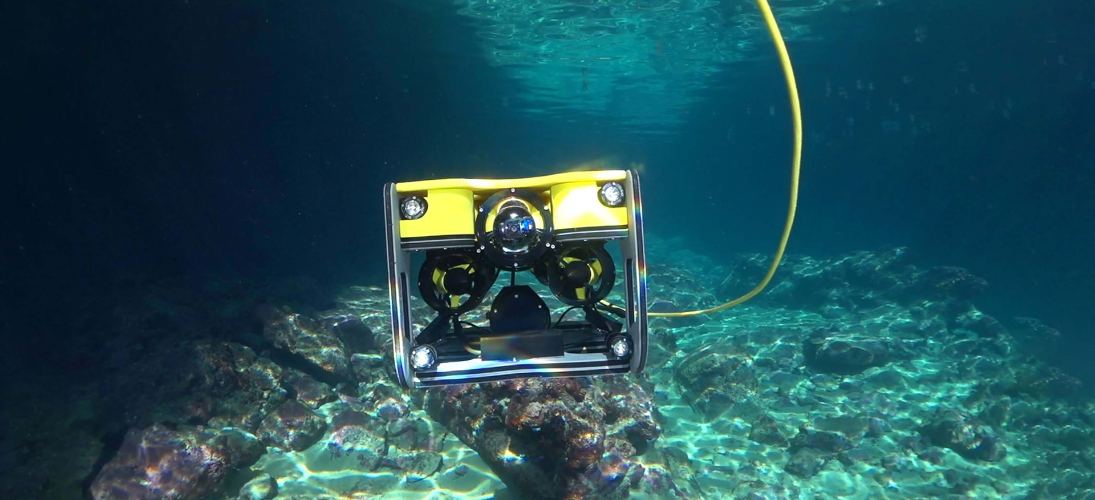
HYDROSAR™ is a cutting-edge autonomous underwater robot designed specifically for search and rescue (SAR), underwater detection, observation, and salvage operations in low-visibility and high-turbidity environments. Engineered for speed, agility, and reliability, HYDROSAR™ is the essential tool for critical missions where human divers or traditional ROVs face limitations.
With its advanced sonar, stereo camera systems, and adaptive navigation AI, HYDROSAR™ can rapidly scan wide underwater areas, identify objects or victims, and relay real-time visuals and data to the surface — empowering rescue teams to act faster and more effectively.
Product Features
Fully untethered with obstacle avoidance and real-time path optimization for confined or debris-filled zones.

Equipped with multi-frequency sonar and low-light/stereo cameras optimized for zero-visibility conditions.

Real-Time Communication & Data Streaming
Delivers live HD video and geolocation data to surface command units via acoustic or 4G/5G links.
Easily configurable for detection, salvage, object recovery, or inspection tools.
Compact & Rapid Deployment
Lightweight and portable; deployable from shore, boat, or aerial drop for time-critical missions.
Structure Diagram
Product parameters
Specification | Details |
Supports Processing Customization | Yes |
Imported | No |
Scope of Work | Suitable for seas, reservoirs, rivers, and lakes |
Pressure-Resistant Depth | 300 meters |
Weight | 15 kg |
Speed | 3 knots |
Cable Length | 300 meters |
Ingress Protection | IP68 |
Battery Capacity | 15,000 mAh |
Battery Life | 5 hours |
Charging Time | 3 hours |
Thrust | 10 kg |
Scope of application
|
|
Sea | Reservoir |
|
|
River | Lake |




Features
1. Linear Motion
Movement in a straight line in a single direction (e.g., forward or backward) without changing heading or orientation.
2. Turn on the Spot
Rotating the robot around its vertical axis while staying in the same position — ideal for adjusting direction in confined areas.
3. Snorkeling Control
Maintains the robot near the water surface, allowing for communication, GPS access, or energy recharge while partially submerged.
4. Underwater Video Recording
Captures continuous video footage during underwater missions — useful for inspections, exploration, or documentation.
5. Underwater Photography
Takes high-resolution still images underwater — ideal for capturing specific targets, marine life, or structural conditions.
6. Depth-fixed Movement
Allows the robot to move horizontally while maintaining a constant depth — stabilized by depth sensors and automated buoyancy control.
7. Cruise-fixed Movement
Maintains a preset speed and heading for long-distance or systematic scanning missions — reduces operator workload.
8. Free Movement
Enables full manual control in all directions and depths — ideal for real-time navigation, exploration, or rescue tasks.



