Product Description
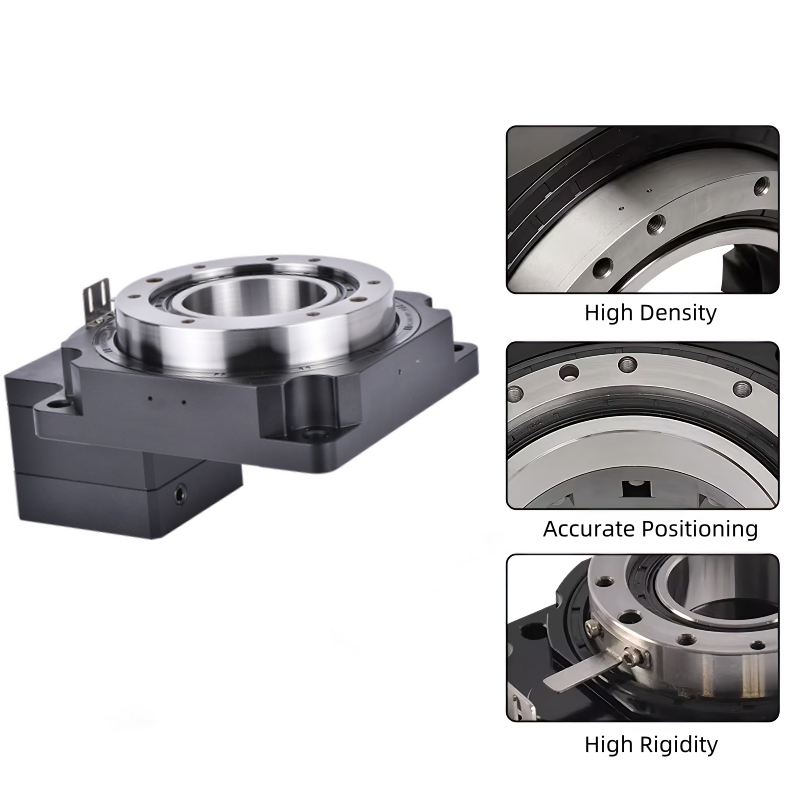
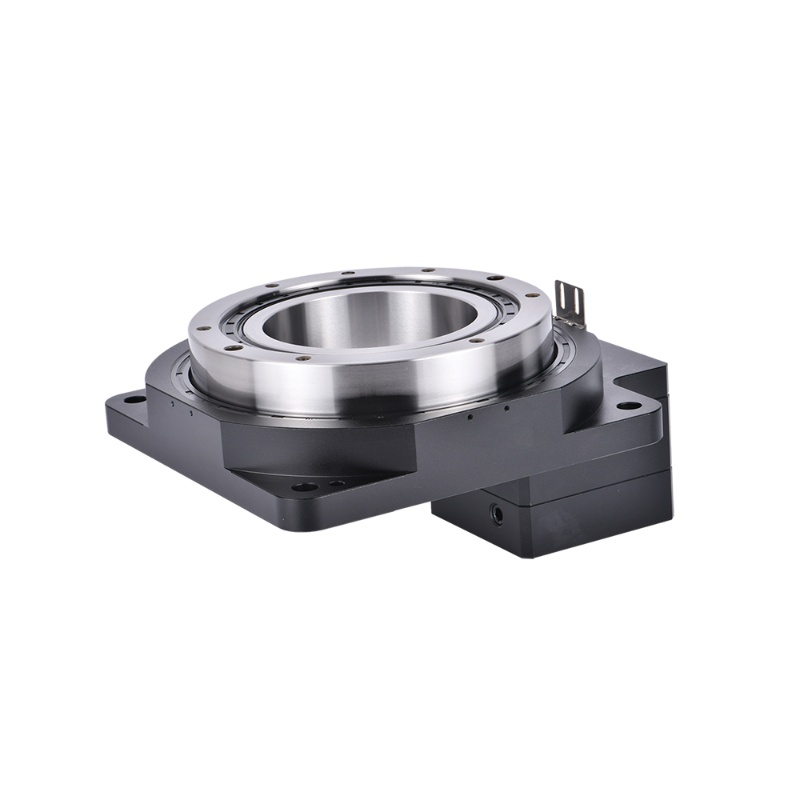
High-performance servo drive solution with rated torque of 35N.m and rated current of 9A, specially designed for robot joints. Adopting high-precision encoder, it has fast response, smooth operation and supports dynamic load adjustment. With compact and lightweight structure and integrated overheat protection, it is suitable for industrial automation, collaborative robots and other scenarios, improving motion control accuracy and reliability, and meeting the requirements of harsh working conditions.
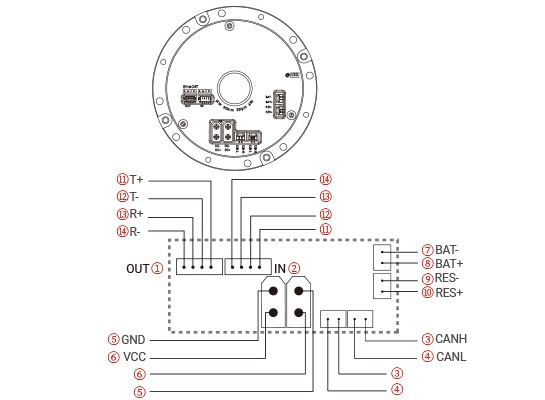
Port Definition | Port Description |
①EtherCAT_OUT | EtherCAT output |
②EtherCAT_In | EtherCAT input |
③CAN_H | CAN_H network signal terminal |
④CAN_L | CAN_L network signal terminal |
⑤GND | Power supply negative pole |
⑥VCC | Power supply positive pole |
⑦BAT- | Multi-turn battery negative pole |
⑧BAT+ | Multi-turn battery positive pole |
⑨RES- | Discharge resistor port |
⑩RES+ | Discharge resistor port |
⑪ T+ | Master sends control command to module |
⑫ T- | Module sends status feedback to master |
⑬ R+ | Master reflects module status data |
⑭ R- | Module reflects master control command |
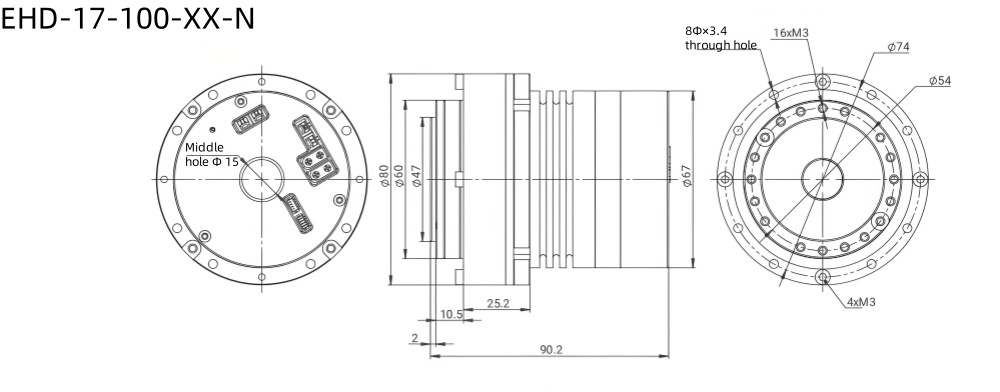
Product parameters
Parameters | Unit | EHD - 14 | EHD-17 | EHD-20 | EHD-25 | EHD-32 |
Gear ratio | - | 100 | 100 | 100 | 100 | 100 |
Input Voltage | V | 48 | 48 | 48 | 48 | 48 |
No Load Speed | RPM | 30 | 30 | 30 | 30 | 20 |
No Load Current | A | 0.9 | 145 | 2.59 | 1.61 | 3.9 |
Rated Speed | RPM | 25 | 25 | 25 | 25 | 18 |
Rated Torque | N.m | 11 | 35 | 50 | 108 | 150 |
Rated Power | W | 100 | 180 | 250 | 400 | 700 |
Rated Current | A | 6.5 | 9 | 13 | 16 | 20 |
Peak Torque | N.m | 28 | 54 | 80 | 157 | 229 |
Peak Current | A | 16.25 | 13.86 | 20.8 | 23.2 | 33.44 |
Back - EMF Constant | Vdc/kgm | 1.39 | 2.79 | 2.79 | 4.89 | 6.28 |
Torque Constant | N.m/A | 0.02 | 0.04 | 0.04 | 0.07 | 0.09 |
Phase Resistance | Ω | 0.62 | 0.7 | 0.36 | 0.155 | 0.08 |
Phase Inductance | mH | 0.43 | 0.47 | 0.51 | 0.33 | 0.18 |
Pole Pair | - | 10 | 10 | 10 | 10 | 10 |
3 Phase Connection | - | Y | Y | Y | Y | Y |
Backlash | Arcsec | - | <20 | <20 | <20 | <20 |
Encoder Type&Interface | - | Dual encoder/ABS - 17bit | ||||
Repeat Position Accuracy | Degree | <0.01 | ||||
Communication | - | CAN / EtherCAT | ||||
Insulation grade | - | F | ||||
*1. Standard motors only support non-brake.
*2. Standard motors support CAN bus and EtherCAT.
*3. Standard motors do not have waterproof function. If you need IP54, please contact sales before ordering.
*4. This product also supports 50:1 reduction ratio. Please contact sales to confirm delivery time before ordering.
*5. Rated torque test method: Test at rated speed at ambient temperature of 24 degrees Celsius (no other heat dissipation method). The motor torque reaches temperature balance under the condition of 60 degrees temperature rise and can work for a long time. The rated torque value of the motor.
Stall torque data | ||||
EHD-17 | Torque | Temperature rise | Stalling time | Phase current |
(N.m) | (℃) | (s) | (Arms) | |
52.5 | 15 | 15 | 6.9 | |
70 | 7 | 10 | 9.8 | |
87.5 | 35 | 8 | 11.9 | |
Application
This joint module with a rated torque of 35N.m and a rated current of 9A is designed for high-precision robot joint drive and is suitable for industrial automation, collaborative robots (Cobot), medical robot arms, AGV/AMR steering systems and precision servo control scenarios. Its strong torque can drive heavy robot arms to move flexibly, and the 9A low current design reduces energy consumption and supports long-term stable operation. The integrated high-precision encoder ensures accurate position control and is suitable for industrial tasks such as assembly, welding, and handling. It can also be used for bionic robot joints to meet the needs of high dynamic response and reliability, and is an ideal choice for the core drive of intelligent equipment.




Service
1. Does it support waterproof and dustproof? What is the protection level?
Yes, our joint modules can be customized with waterproof and dustproof functions according to customer needs.
The standard version is not waterproof for indoor applications, and can be equipped with IP56 protection, which is suitable for certain outdoor
or humid environments. If you have higher protection requirements (such as IP67), you can contact us for customization.
2. Does it support customized reduction ratio?
Yes. We can provide customized solutions with different reduction ratios according to your application requirements.
The conventional reduction ratio range covers: 10:1 ~ 200:1, and the best combination can be matched according to load, speed, and torque requirements.
3. What is the difference between the single encoder and dual encoder versions?
The single encoder version monitors the rotation of the motor end and is suitable for general precision requirements;
the dual encoder version monitors the motor end and the output end at the same time, which can effectively compensate
for the backlash and elastic error, and is suitable for high-precision control and high safety requirements (such as collaborative robots, medical equipment).
4. What communication interfaces can the joint module support?
The standard version supports analog control (current/voltage command) or pulse command control;
According to the needs, it can be optionally equipped with support for industrial bus protocols
such as CANopen, EtherCAT, Modbus-RTU, etc. (customization is required).
5. Does it support integrated drive and control? Can it be directly connected to the controller?
We provide optional integrated drive and control joint modules with built-in motor drivers and position servo controllers.
Users can directly control through the bus or pulse interface without external independent drivers, simplifying wiring and system integration.
6. Are there standard 3D model files available for download?
Yes. We provide 3D model files in STEP format for all models, which facilitates customers to quickly integrate mechanical design.
If you need to obtain it, please contact our sales staff to obtain the download link or data package.
7. What is the operating temperature range?
The standard operating temperature range is: -10°C ~ +50°C.
If you need to resist low or high temperature applications (such as cold storage, hot working environment),
you can customize special temperature control solutions.
8. Can the joint module be designed hollow? Can it be wired?
Some models are designed with hollow shafts, and the center aperture can be used for wiring, air pipes, water pipes, etc.,
which is convenient for realizing the functional layout of complex end effector.
For specific center aperture sizes, please refer to the model selection table or consult customer service.
9. How long is the standard delivery period and customized delivery period?
Standard model delivery period: usually 7-14 working days.
The delivery period for customized requirements (such as IP56 waterproof, reduction ratio customization, communication protocol customization, etc.)
depends on specific requirements, generally 5-10 weeks.
10. How long is the warranty period? How about after-sales service?
All joint module products provide a 12-month warranty period (under normal use).
We provide remote technical support, fault diagnosis guidance, and fast spare parts supply services.
Paid repair and maintenance services are also available outside the warranty period.
Pack list
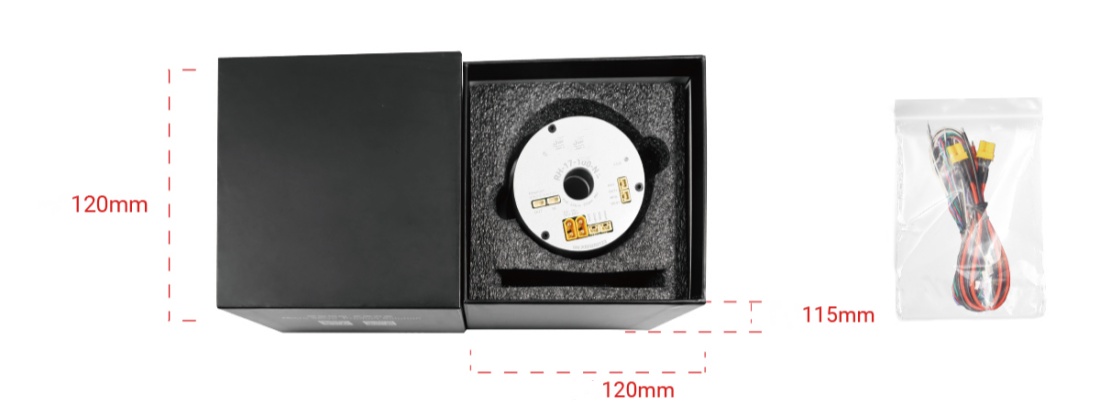
A. Power cable *2
B. CAN bus communication cable *2/Bleeding resistor cable *1/Multi-turn battery cable *1
C. 120Ω terminal resistor *1
D. EtherCAT communication cable *2