





产品描述
1、隔离 CANOPEN 通信,符合 CiA301 V4.2.0 规范。
A. 支持 SDO,TPDO ,RPDO。
B. 支持速度模式,位置模式(轮廓模式,插补模式)。
C. 支持心跳生产和消费
2、15 位绝对编码器,一圈脉冲高达 32768。
3、多圈绝对值(需配电池)。脉冲模式:重新上电自动回断电位置。 通信模式:可断电记录位置。
4、多级 DD 马达结构,大扭力输出。
5、谐波减速器、电机、驱动器、编码器集成,一体化伺服,简化接线,体积超小。
6、低噪音,低振动,高速定位,高可靠性。
7、FOC 场定向矢量控制,支持位置/速度闭环。
8、可工作在零滞后给定脉冲状态,跟随零滞后。
9、16 位电子齿轮功能。
10、提供 CANOPEN 上位机,可监测电机状态和修改参数。
11、位置模式,支持脉冲+方向信号,编码器跟随
12、速度模式,支持 PWM 占空比信号调速
13、具有堵转,过流保护,过压保护。
14、绝对值低功耗多圈功能。
A. 一体式电机485/CAN通讯版本可添加多圈功能;
B. 电机通电时,内部设有充电电路为电池充电。电机断电时,电池电流消耗仅为0.07mA;
C. 电机断电后,驱动电机轴旋转,唤醒编码器并继续记忆位置;
D. 多圈记忆范围-60000~60000圈;
E. 原点设置简便,可在任意位置设置为原点;
F. 多种回零方式:通讯回零、上电自动回零、零点信号输出;
G. 故障保护:电池断电报警。

谐波减速器、电机、驱动器、编码器集成,一体化伺服,简化接线,体积超小
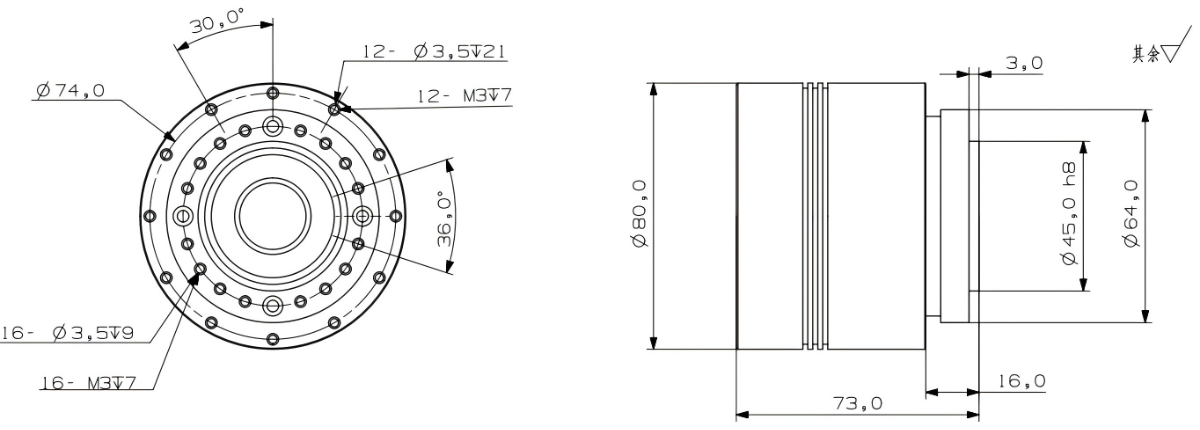
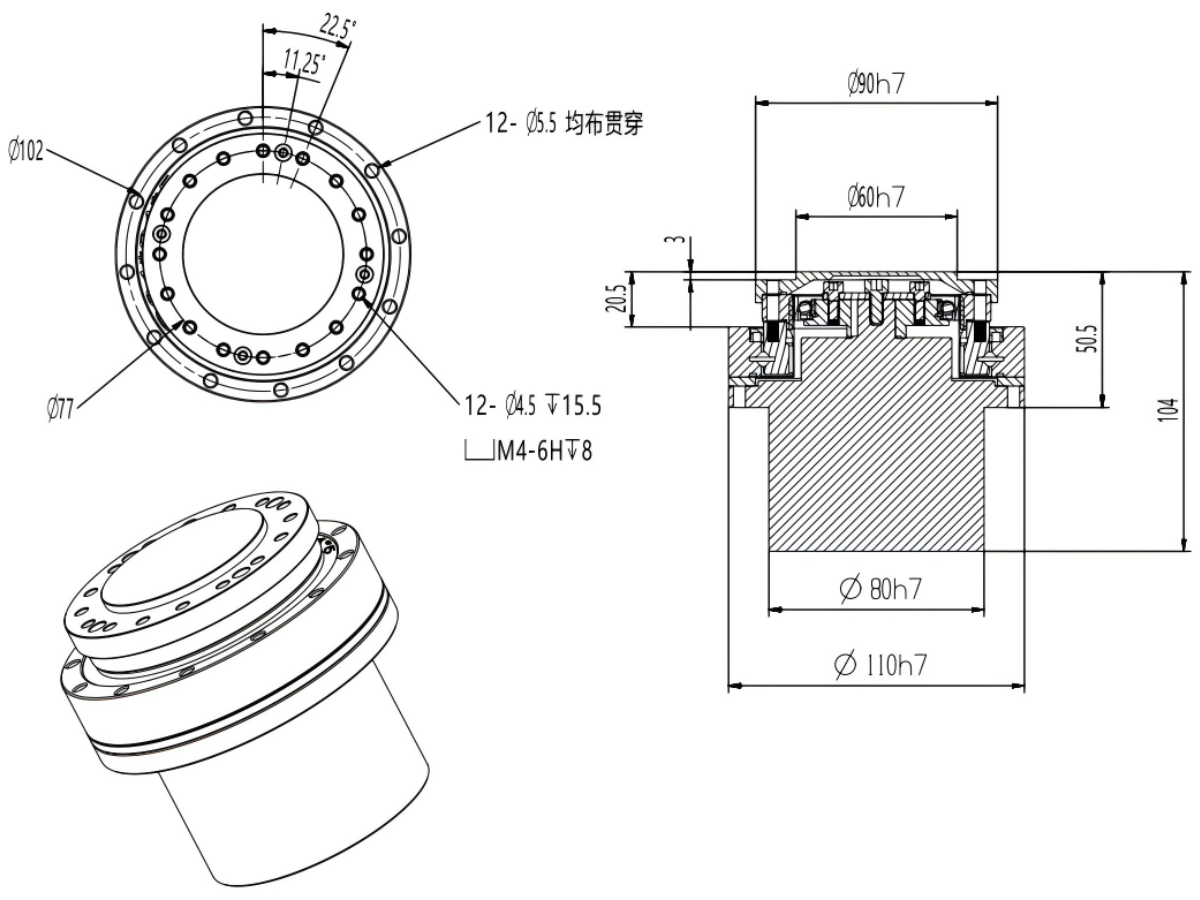
尺寸图
M4210 系列机器人关节模组

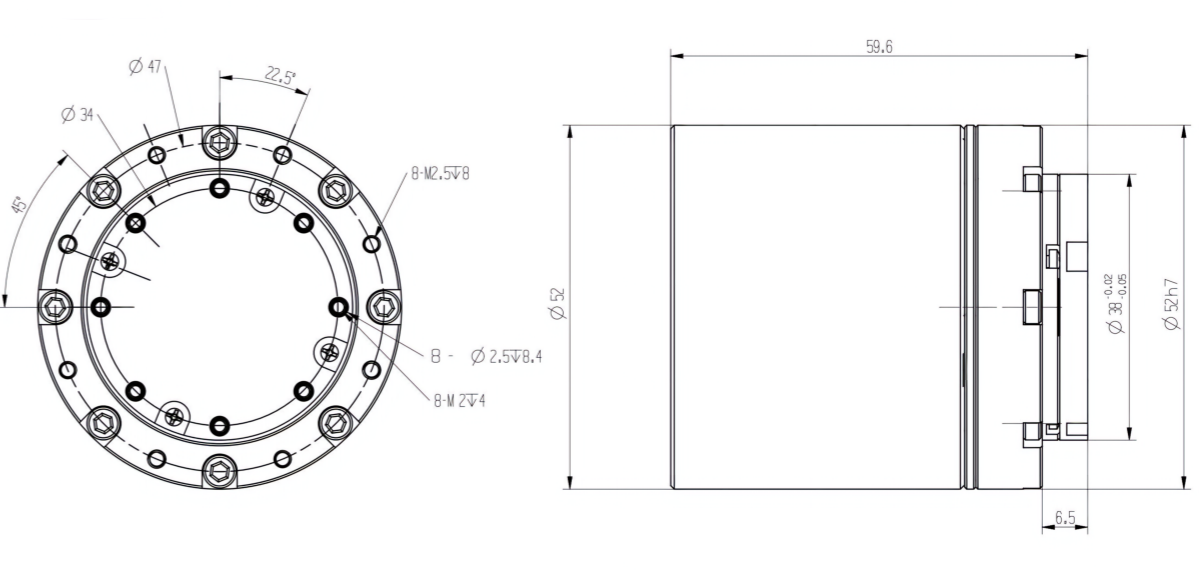
M4215 系列机器人关节模组

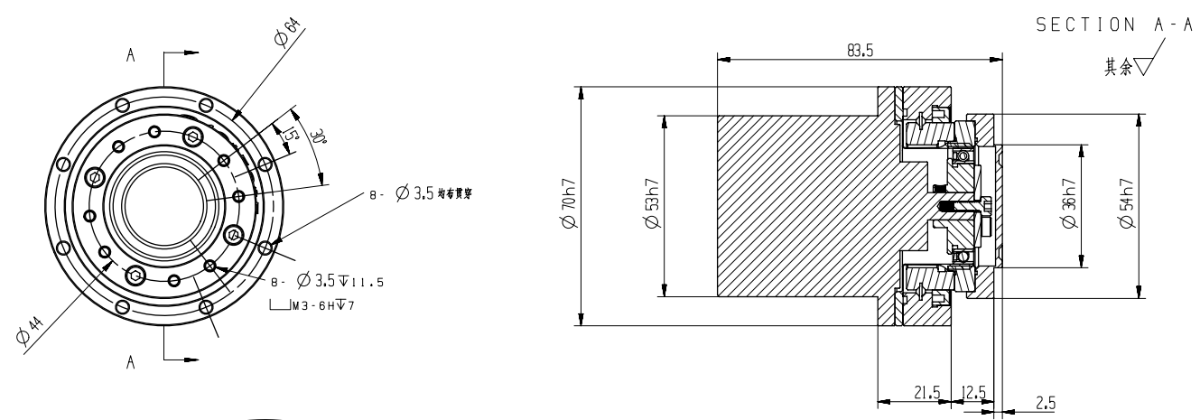
M4215 系列机器人关节模组

M8025 系列机器人关节模组

产品参数
型号参数 | M4210E11BXX | M4215E14BXX | M8010E17BXX | M8025E25BXX | |
整体参数 | 电机额定电压 | 36VDC±10% | 36VDC±10% | 36VDC±10% | 36VDC±10% |
电机额定电流 | 1.5A | 2A | 3.5A | 7A | |
减速后输出扭矩 | 3.2NM | 10NM | 34/51/51NM | 51/85NM | |
重量 | 0.4KG | 0.8KG | 1KG | 2.5KG | |
减速后的转速范围 | 0~40RPM | 0~40/0~25/0~20RPM | 0~30/0~18/0~15RPM | 0~30/0~19RPM | |
减速器参数 | 减速比 | 50 | 50/80/100 | 50/80/100 | 50/80 |
输出额定转矩 | 3.2NM | 7/10/10NM | 34/51/51NM | 51/85NM | |
启停峰值转矩 | 7.8NM | 23/30/36NM | 44/70/70NM | 127/178NM | |
背隙 | 小于10 弧秒 | 小于10 弧秒 | 小于20弧秒 | 小于 20弧秒 | |
设计寿命 | 8500hour | 8500hour | 8500hour | 8500hour | |
电机参数 | 扭矩 | 0.3NM | 0.5NM | 1NM | 2NM |
额定转速 | 2000RPM | 1500RPM | 1500RPM | 1000RPM | |
最大转速 | 2500RPM | 2000RPM | 2000RPM | 1500RPM | |
功率 | 33W | 50W | 100W | 200W | |
电阻 | 3.45 | 2.65 | 0.86 | 0.53 | |
电感 | 1.18mh | 1.1mh | 0.8mh | 0.5mh | |
转动惯量 | 0.9139x10-4 KG/M 2 | 0.9139x10-4 KG/M 2 | 0.69x10-4 KG/M 2 | 1.74x10-4 KG/M 2 | |
型号参数 | M4210E11BXX | M4215E14BXX | M8010E17BXX | M8025E25BXX | |
反馈信号 | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈9位) | |
冷却方式 | 自然冷却 | 自然冷却 | 自然冷却 | 自然冷却 | |
位置控制模式 | 最大输入脉冲频率 | 500KHz | 500KHz | 500KHz | 500KHz |
脉冲指令模式 | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相 | |
电子齿轮比 | 设置范围 1~65535 比 1~65535 | 设置范围 1~65535 比 1~65535 | 设置范围 1~65535 比 1~65535 | 设置范围1~65535 比 1~65535 | |
位置采样频率 | 2KHZ | 2KHZ | 2KHZ | 2KHZ | |
保护功能 | 堵转报警,过流报警 | 堵转报警,过流报警 | 堵转报警,过流报警 | 堵转报警,过流报警 | |
通讯接口 | Canopen (CAN 通信) /Modbus(485 通信) | Canopen (CAN 通信) /Modbus(485 通信) | Canopen (CAN通信) | Canopen (CAN 通信,速率1M) | |
使用环境 | 环境温度 | 0~40° | 0~40° | 0~40° | 0~40° |
电机允许最高温度 | 85° | 85° | 85° | 85° | |
湿度 | 5~95% | 5~95% | 5~95% | 5~95% | |
应用接线图
接口定义
电源连接器

端子序号 | 名称 | 功能 |
1 | +V | 直流电源正极 +24V~36V,正负极接反会直接短路电源,也可能损坏驱动器 |
2 | GND | 直流电源地,正负极接反会直接短路电源,也可能损坏驱动器 |
通讯及输出接口
适用于CANOPEN通讯协议

DB9 公头 | |||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
PU+ | PU- | DIR+ | DIR- | WR+ | ZO | COM | CANL | CANH | |
蓝 | 蓝黑 | 绿 | 绿黑 | 红白 | 黄 | 黑白 | 棕 | 白 | |
端子序号 | 名称 | 功能 |
1 | PU+ | 脉冲控制信号:脉冲上升沿有效;PU-高电平时为3.3~5V,低电平时为0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于1.2μs。如采用+12V或+24V时需串联电阻。 |
2 | PU- | |
3 | DIR+ | 方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5μs建立。DIR-高电平时DIR-3.3~5V,低电平时0~0.5V。 |
4 | DIR- | |
5 | WR+ | 报警信号输出,内部为光耦NPN输出,平时为高阻态,报警时与COM导通。 |
6 | ZO | 编码器零点输出。有零点信号光耦合器NPN输出导通信号。 |
7 | COM | 输出信号与485电源公共地。 |
8 | CANL | CAN通讯端口CANL,内置隔离电源。 |
9 | CANH | CAN通讯端口CANH,内置隔离电源。 |
适用于MODBUS通讯协议
端子序号 | 名称 | 功能 |
1 | +V | 直流电源正极 +24V~36V,正负极接反会直接短路电源,也可能损坏驱动器 |
2 | GND | 直流电源地,正负极接反会直接短路电源,也可能损坏驱动器 |
端子序号 | 名称 | 功能 |
1 | PU+ | 脉冲控制信号:脉冲上升沿有效;PU-高电平时为3.3~5V,低电平时为0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于1.2μs。如采用+12V或+24V时需串联电阻。 |
2 | PU- | |
3 | DIR+ | 方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5μs建立。DIR-高电平时DIR-3.3~5V,低电平时0~0.5V。 |
4 | DIR- | |
5 | WR+ | 报警信号输出,内部为光耦NPN输出,平时为高阻态,报警时与COM导通。 |
6 | ZO | 编码器零点输出。有零点信号光耦合器NPN输出导通信号。 |
7 | COM | 输出信号与485电源公共地。 |
8 | 485A | 485通讯A口,内置隔离电源。 |
9 | 485B | 485通讯B口,内置隔离电源。 |
服务
Q1:M系列支持哪些通信协议?
A:M系列支持隔离CANopen(CiA301 V4.2.0)、RS485、EasyCAN等协议,并可通过上位机进行切换与配置。
Q2:断电后还能记住当前位置吗?
A:可以,M系列支持低功耗多圈绝对值编码器(带电池版本),断电后驱动轴转动仍能被记录,重新上电自动恢复。
Q3:如何设置电机的原点?
A:原点可以通过通信方式设置、上电自动回零,也可以通过零点信号进行快速设置,用户可根据应用场景灵活选择。
Q4:是否需要外部驱动器?
A:不需要,M系列是高度集成的一体化伺服模组,内置电机、编码器和驱动器,用户无需额外配置。
Q5:是否支持过载保护?
A:是的,M系列具备堵转保护、过流保护、过压保护,并能通过上位机监测状态,保障运行安全。
联系我们