





Product Description
DD series direct drive joint motor
Diameter: 40-109mm
Torque: 0.09-4nm
Weight: 70-1028 grams

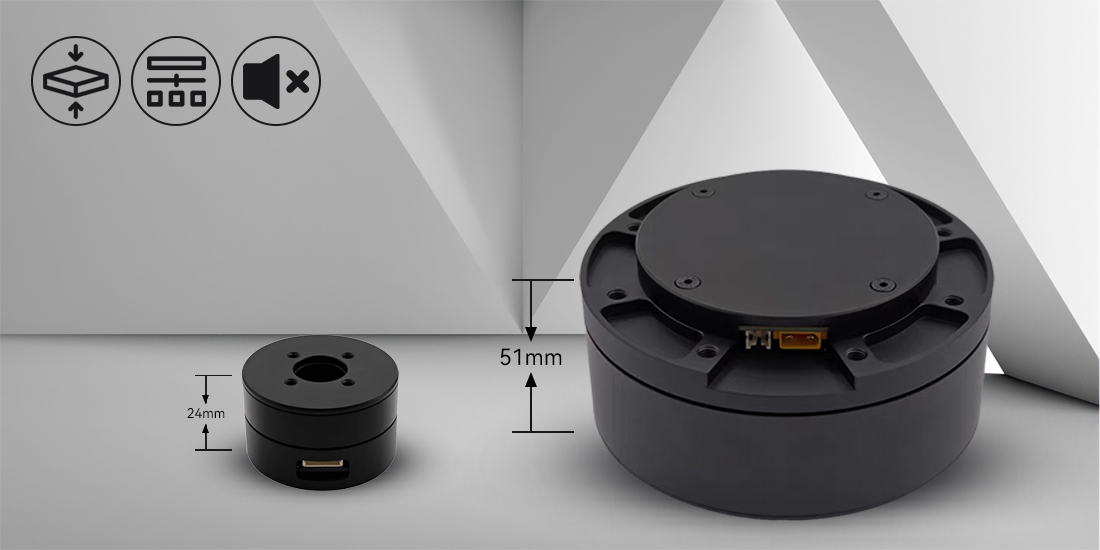
Ultra-thin joint module
Zero backlash, compact structure, low noise

The direct drive joint motor does not include a reducer
The application end is directly associated
Matching single-turn absolute value encoders, supporting RS485/CAN
Product parameters
Parameters | Unit | DD4006-7 | DD5010-10 | DD6015-6 | DD7010-2 | DD7010-11 | DD8015-2 | DD9015-1 | DD9015-4 | DD11025-3 |
Nominal voltage | V | 12 | 24 | 24 | 24 | 36 | 24 | 24 | 36 | 36 |
Voltage range | V | 10~28 | 10~28 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 |
Nominal current | A | 1.1 | 0.9 | 1.6 | 3.1 | 1.3 | 2.9 | 5.8 | 2.1 | 3.8 |
Nominal power | W | 13.2 | 21.6 | 38.4 | 74.4 | 46.8 | 69.6 | 139.2 | 75.6 | 136.8 |
Nominal torque | N.M | 0.09 | 0.2 | 0.65 | 0.8 | 0.8 | 1.2 | 1.1 | 1.26 | 4 |
Nominal speed | RPM | 467 | 504 | 264 | 618 | 294 | 354 | 954 | 372 | 168 |
No-load max speed | RPM | 1412 | 828 | 558 | 924 | 564 | 516 | 1146 | 534 | 330 |
Peak torque | N.M | 0.15 | 0.49 | 1.26 | 1.93 | 1.59 | 3.7 | 5.17 | 4.11 | 8.5 |
Peak current | A | 1.9 | 1.9 | 3.2 | 16 | 2.7 | 16 | 33.1 | 6.6 | 16 |
Speed constant | rpm/v | 117 | 34.4 | 23.3 | 38.5 | 15.5 | 21.5 | 47.8 | 14.8 | 9.2 |
Torque constant | N.M/A | 0.08 | 0.23 | 0.43 | 0.22 | 0.61 | 0.41 | 0.19 | 0.67 | 1.03 |
Rotor inertia | gcm² | 65 | 195 | 504 | 672 | 672 | 1555 | 2574 | 2574 | 7796 |
Number of pole pairs | Pairs | 11 | 14 | 14 | 14 | 14 | 21 | 21 | 21 | 21 |
Phase resistance | Ω | 3.17 | 5.16 | 5.77 | 0.83 | 5.29 | 1 | 0.33 | 3.89 | 1.5 |
Phase inductance | mH | 0.54 | 1.63 | 3.82 | 0.68 | 3.68 | 0.63 | 0.23 | 3.14 | 1.13 |
Motor weight | g | 70 | 134 | 251 | 261 | 261 | 418 | 534 | 534 | 1028 |
Communication | / | RS485/CAN | ||||||||
Encoder type | / | Single turn absolute value | ||||||||
Resolution | bit | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
Working temperature | ℃ | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 |
ID of encoder magnetic steel) | mm | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 |
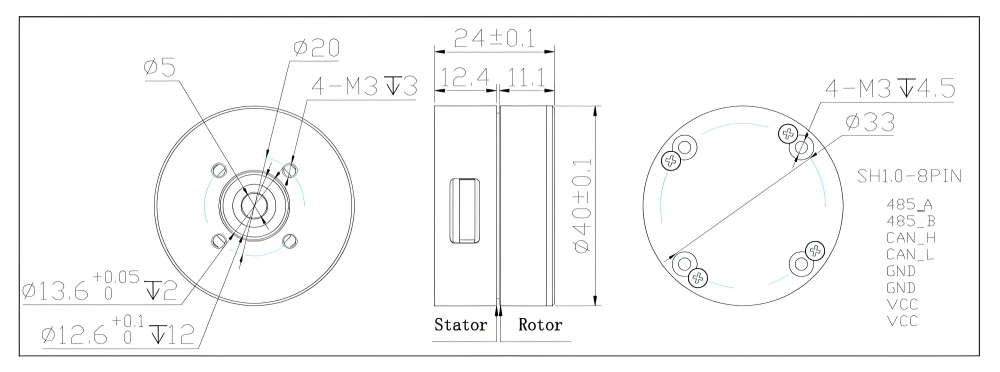
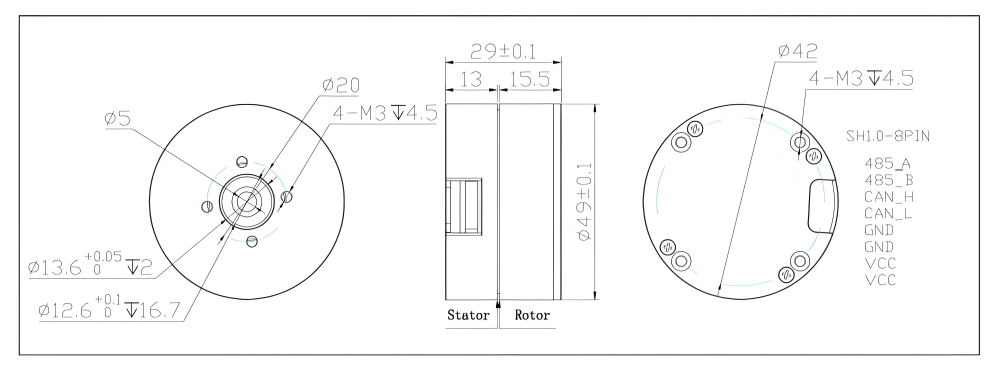
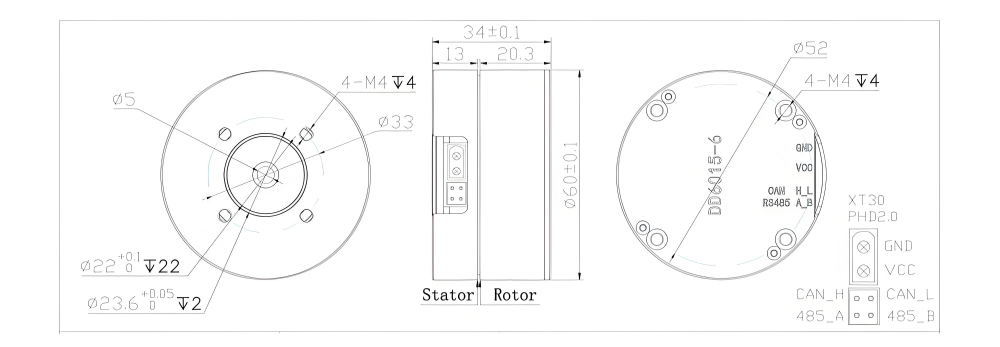
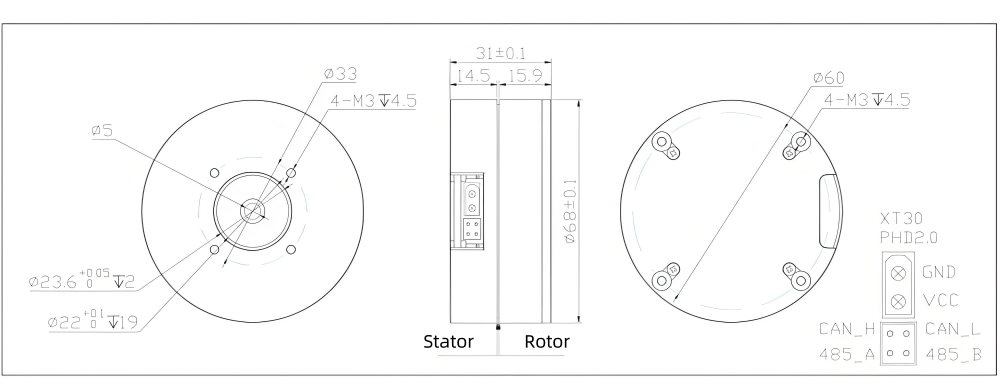
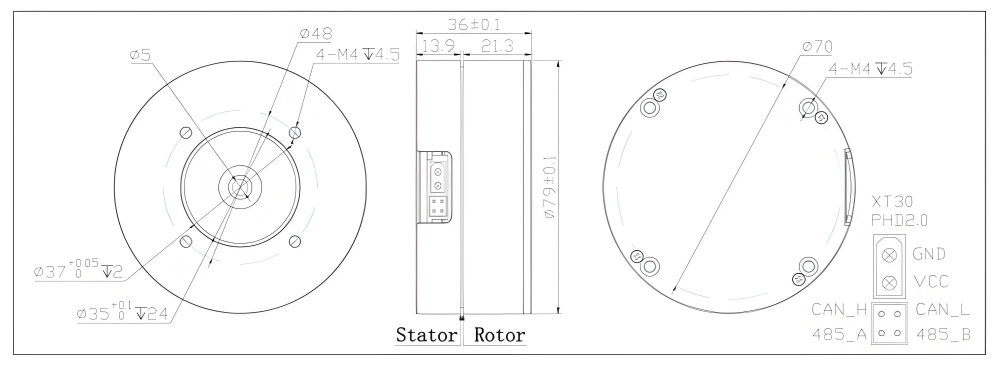
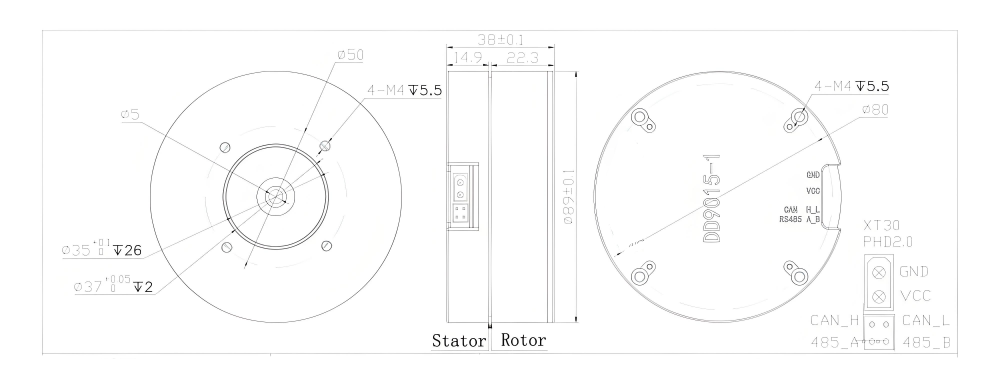
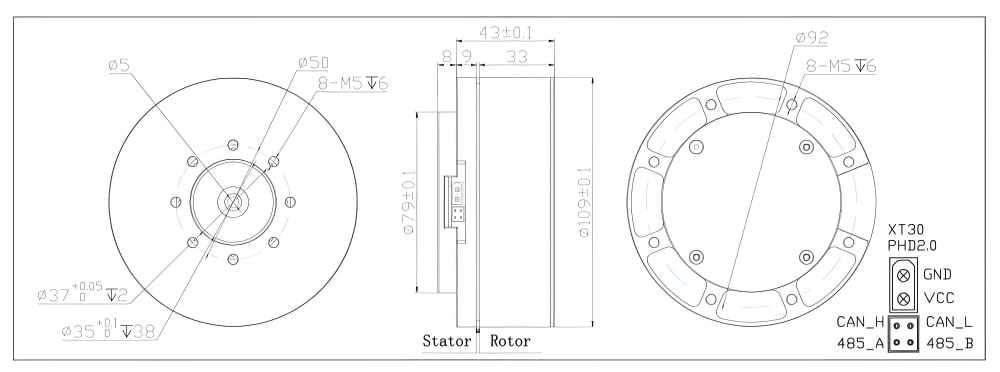
Motor size | mm | Ø40*24*Ø12.6 | Ø49*29*Ø12.6 | Ø60*34*Ø22 | Ø68*31*Ø22 | Ø68*31*Ø22 | Ø79*36*Ø35 | Ø89*38*Ø35 | Ø89*38*Ø35 | Ø109*51*Ø35 |
DD4006-7
DD5010-10
DD6015-6
DD7010
DD8015-2
DD9015-1
DD11025-3
Application
Direct drive joint modules are applied in robots, medical equipment, and precision manufacturing to enhance efficiency and accuracy.

Notes
1. Do not disassemble the motor privately;
2. All interfaces do not support hot plugging. You need to plug in the wires before powering on. At the same time, the ground wire of the control signal needs to be connected;
3. The motor is not allowed to suddenly stall during high-speed operation;
4. Do not use overvoltage;
5. Monitor the motor temperature in time, and make the motor work in a reasonable temperature range by reducing power or increasing heat dissipation;
6. Before installing the device, it is recommended to use the host computer to debug the same working conditions first;
7. Update the firmware in time to obtain better motor performance;
Pack



Contact Us