



产品描述
DD40 直驱关节电机 低扭矩,高转速转速,精准控制,响应快,适用于机器人、自动化设备等高精度场景。
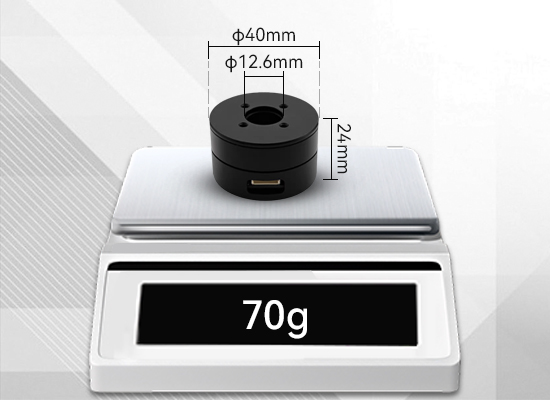
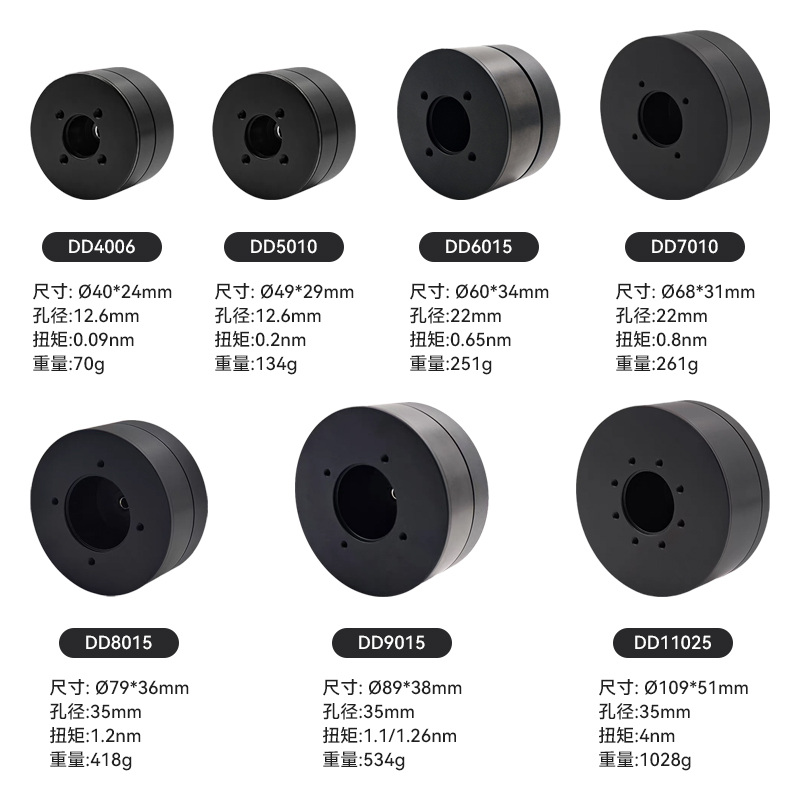
结构紧凑,轻自重
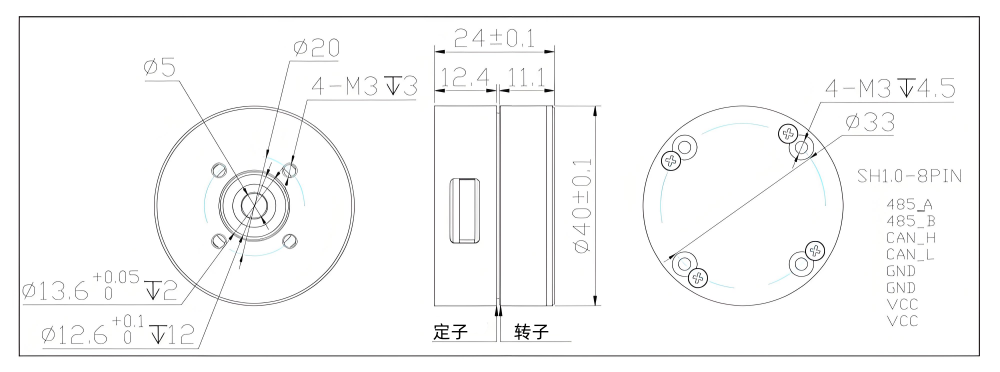
高24mm,直径40mm ,重量 70g
特点
电机转子直接与负载连接
直接输出电机扭矩
零背隙、高刚性、高动态响应
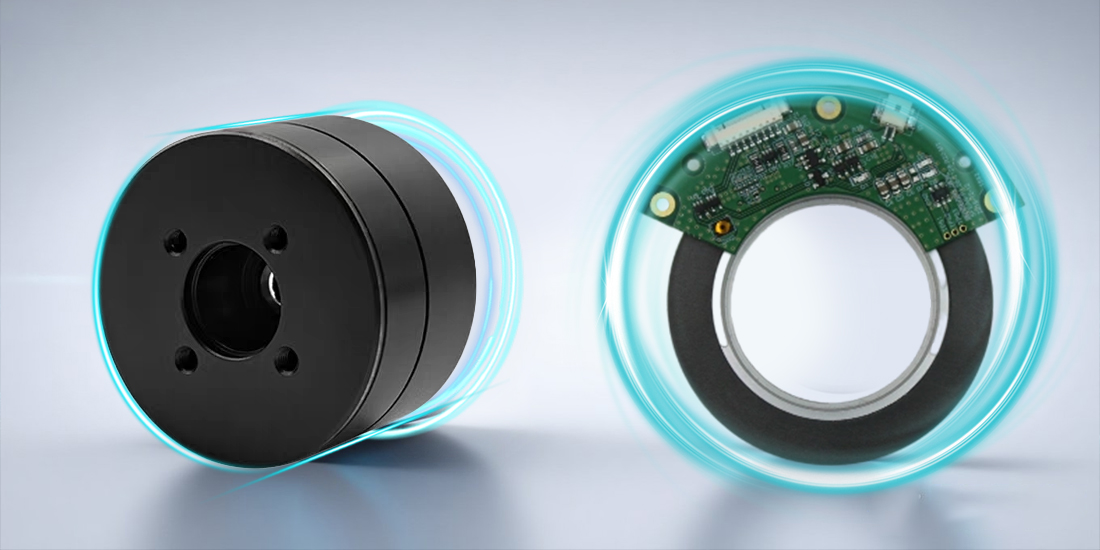
超高分辨率单圈绝对值编码器
产品参数
参数 | 单位 | DD4006-7 | DD5010-10 | DD6015-6 | DD7010-2 | DD7010-11 | DD8015-2 | DD9015-1 | DD9015-4 | DD11025-3 |
额定电压 | V | 12 | 24 | 24 | 24 | 36 | 24 | 24 | 36 | 36 |
电压范围 | V | 10~28 | 10~28 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 | 12~40 |
额定电流 | A | 1.1 | 0.9 | 1.6 | 3.1 | 1.3 | 2.9 | 5.8 | 2.1 | 3.8 |
额定功率 | W | 13.2 | 21.6 | 38.4 | 74.4 | 46.8 | 69.6 | 139.2 | 75.6 | 136.8 |
额定扭矩 | N.M | 0.09 | 0.2 | 0.65 | 0.8 | 0.8 | 1.2 | 1.1 | 1.26 | 4 |
额定转速 | RPM | 467 | 504 | 264 | 618 | 294 | 354 | 954 | 372 | 168 |
空载最大转速 | RPM | 1412 | 828 | 558 | 924 | 564 | 516 | 1146 | 534 | 330 |
峰值扭矩 | N.M | 0.15 | 0.49 | 1.26 | 1.93 | 1.59 | 3.7 | 5.17 | 4.11 | 8.5 |
峰值电流 | A | 1.9 | 1.9 | 3.2 | 16 | 2.7 | 16 | 33.1 | 6.6 | 16 |
转速常数 | rpm/v | 117 | 34.4 | 23.3 | 38.5 | 15.5 | 21.5 | 47.8 | 14.8 | 9.2 |
扭矩常数 | N.M/A | 0.08 | 0.23 | 0.43 | 0.22 | 0.61 | 0.41 | 0.19 | 0.67 | 1.03 |
转子惯量 | gcm² | 65 | 195 | 504 | 672 | 672 | 1555 | 2574 | 2574 | 7796 |
级对数 | Pairs | 11 | 14 | 14 | 14 | 14 | 21 | 21 | 21 | 21 |
相电阻 | Ω | 3.17 | 5.16 | 5.77 | 0.83 | 5.29 | 1 | 0.33 | 3.89 | 1.5 |
相电感 | mH | 0.54 | 1.63 | 3.82 | 0.68 | 3.68 | 0.63 | 0.23 | 3.14 | 1.13 |
电机重量 | g | 70 | 134 | 251 | 261 | 261 | 418 | 534 | 534 | 1028 |
通信方式 | / | RS485/CAN | ||||||||
编码器类型 | / | 单圈绝对值 | ||||||||
电机驱动分辨率 | bit | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 |
工作温度范围 | ℃ | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 | -20~80 |
编码器磁钢内径 | mm | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 | Ø5 |
电机尺寸 | mm | Ø40*24*Ø12.6 | Ø49*29*Ø12.6 | Ø60*34*Ø22 | Ø68*31*Ø22 | Ø68*31*Ø22 | Ø79*36*Ø35 | Ø89*38*Ø35 | Ø89*38*Ø35 | Ø109*51*Ø35 |
DD4006
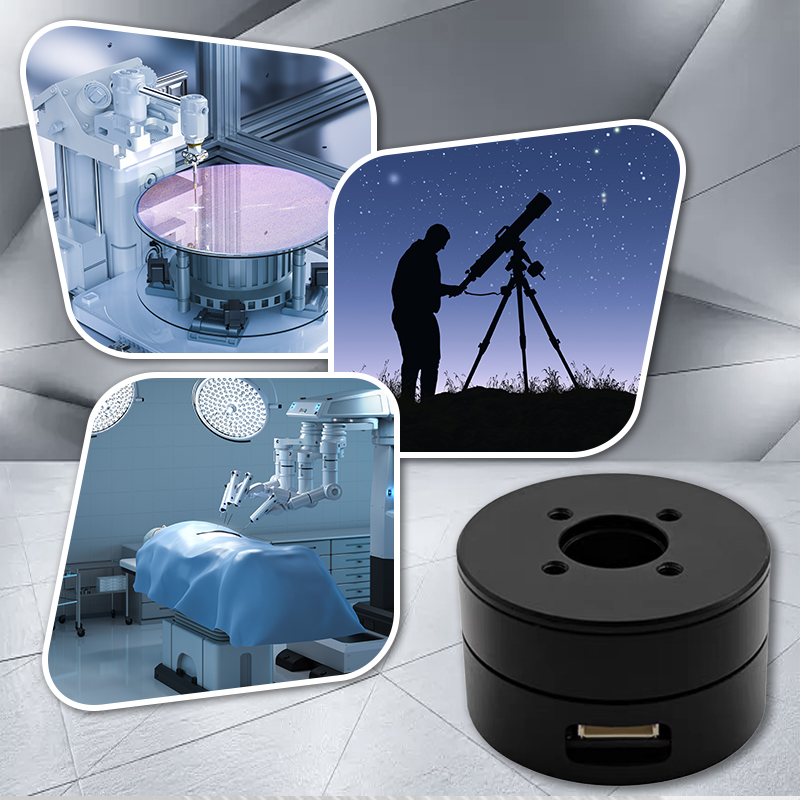
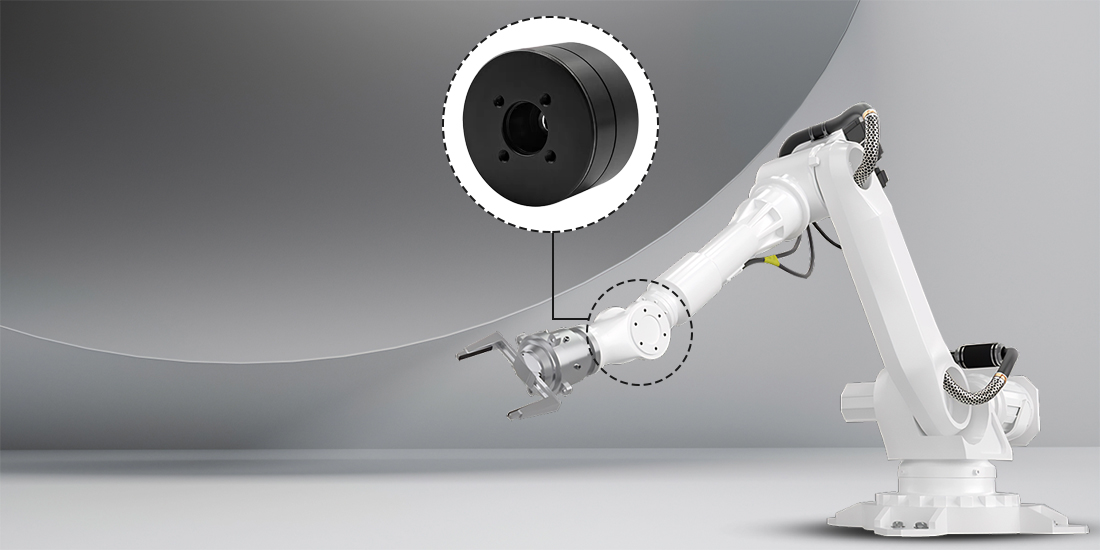
应用
直驱关节模组适用于机器人、精密加工等高精度、高动态场景,提升效率与稳定性。
注意
1、禁止私自拆解电机;
2、所有接口都不支持热插拔,需要先插线后上电,同时控制信号的地线需要接;
3、电机在高转速运行过程中不允许突然堵转;
4、禁止过压使用;
5、及时监测电机温度,通过降低功率或者增加散热的方式,使电机工作在合理的温度区间;
6、在装入设备前,建议使用上位机先进行相同工况的调试;
7、及时更新固件以获得更优异的电机性能;
联系我们