




产品描述
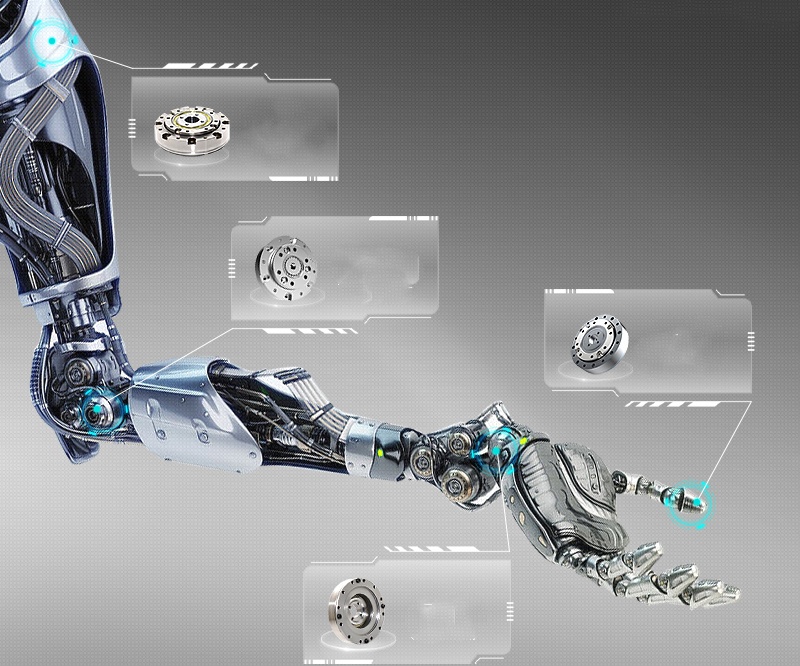
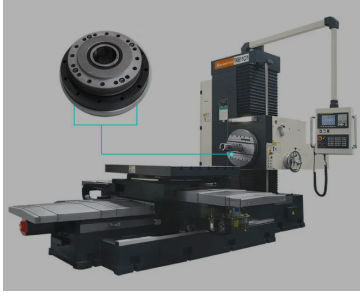
谐波减速器是一种新型减速装置,主要由波发生器、柔性齿轮(挠性轮)、刚性齿轮(刚轮)三个基本部件组成。谐波减速器广泛应用于工业机器人、数控机床、航空航天、医疗设备、自动化生产线等领域。在机器人领域,它可以实现高精度的位置控制,保证机器人的末端执行器能准确地到达预定位置,完成精细的操作,如装配微小的零件、焊接电子产品等。虽然体积小,但能在有限的空间内提供很大的扭矩,满足机器人在搬运重物、执行复杂动作等场合的动力需求

产品参数
| 减速比 | 30 | 50 | 80 | 100 | 120 |
| 2000r/min时输入额定扭矩 | 16.2Nm | 27Nm | 76.8Nm | 96Nm | 115.66Nm |
| 启动和停止时允许峰值扭矩 | 41.4Nm | 69Nm | 88Nm | 110Nm | 132.53Nm |
| 平均负载最大允许扭矩 | 22.8Nm | 38Nm | 60Nm | 75Nm | 90.36Nm |
| 齿隙 | ≤20Arcsec | ≤20Arcsec | ≤10Arcsec | ≤10Arcsec | ≤10Arcsec |
| 允许最大输入转速 | 5600rpm | ||||
| 允许平均输入转速 | 3500rpm | ||||
| 转动惯量(1/4GD) | 0.282(lx104 kgm²)0.288(Jx105kfgms²) | ||||
技术创新
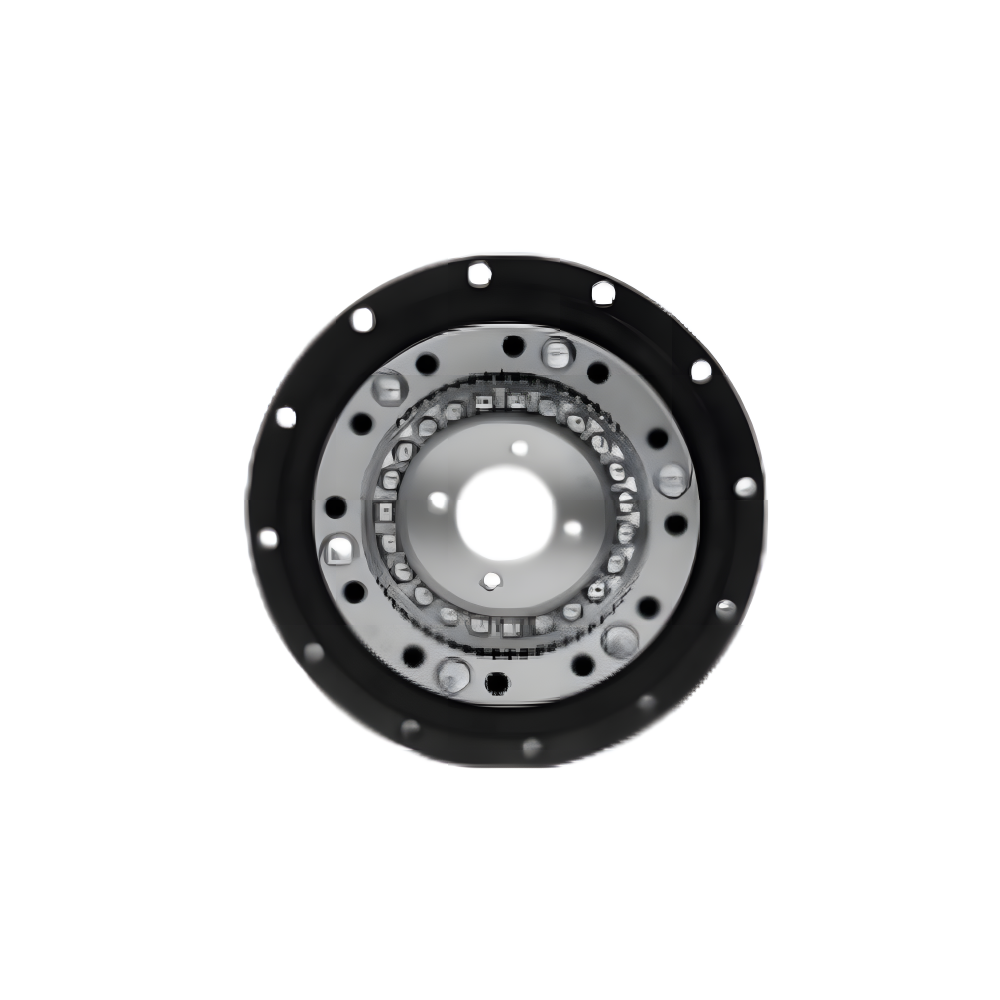
1、柔轮特殊工艺
我们在柔轮齿加工过程中创新性地发明了变形后精加工的方法,在保证精度的同时解决了传统钢制柔轮接触不均匀的问题,使齿面充分啮合,受力更均匀,摩擦更小,更耐用。
2、创新发明S型齿形设计
我们与高校深海静音传动实验室联合开展如何平稳传递摩擦、降低齿切摩擦系数的研究,创新性地发明了S型谐波齿廓设计理论,并结合运动学、摩擦力学和润滑学,设计出自动生成S型曲线的仿真软件。
3、刀具自主设计开发
我们在筑博齿轮加工中创造性地开发了前切后压一体化复合刀具,解决了微型谐波减速器刀具制造难度大造成的市场空白,开发出一系列行业独有的微型谐波减速器产品。
产品展示

在加工工艺领域,我们自主研发了一系列高精度、高效率的加工设备与工艺路线,从精密锻造、数控切削到特种加工,每一个环节都严格把控加工精度与质量,实现了从传统加工模式向智能化、数字化加工制造的转型升级。

针对构件性能处理,我们采用特殊的热处理工艺、表面强化技术以及精密加工后的微观结构调控方法,有效提升构件的硬度、疲劳强度与尺寸稳定性,确保其在长时间、高负荷的谐波传动过程中性能可靠、经久耐用。
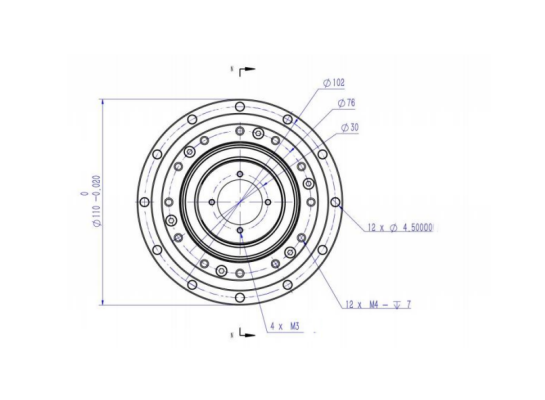
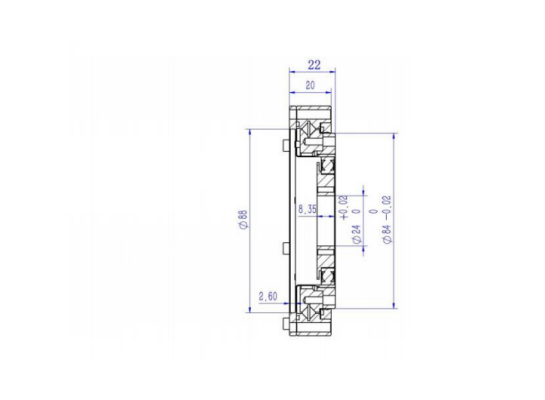
尺寸和接口
应用案例
谐波减速器体积小、重量轻,可安装在机械手狭小的空间内,为手部关节提供精确的动力传输和运动控制,让机械手实现灵活的运动。此外,谐波减速器的低振动、低噪音特性也有助于降低手部关节运动时的振动和噪音,提高机器人的运行稳定性和静音性。人形机器人的肢体需要完成各种复杂、细腻的动作,如抓取物体、行走、攀爬等,谐波减速器的传动精度高,可以保证机器人肢体关节准确到达预定位置,实现高精度的运动控制.