产品描述
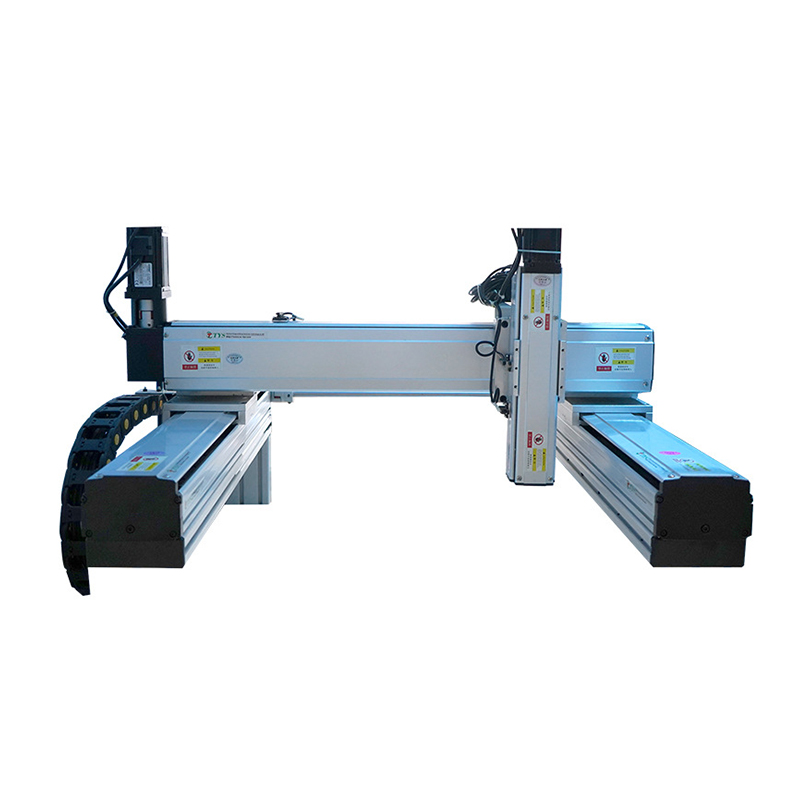
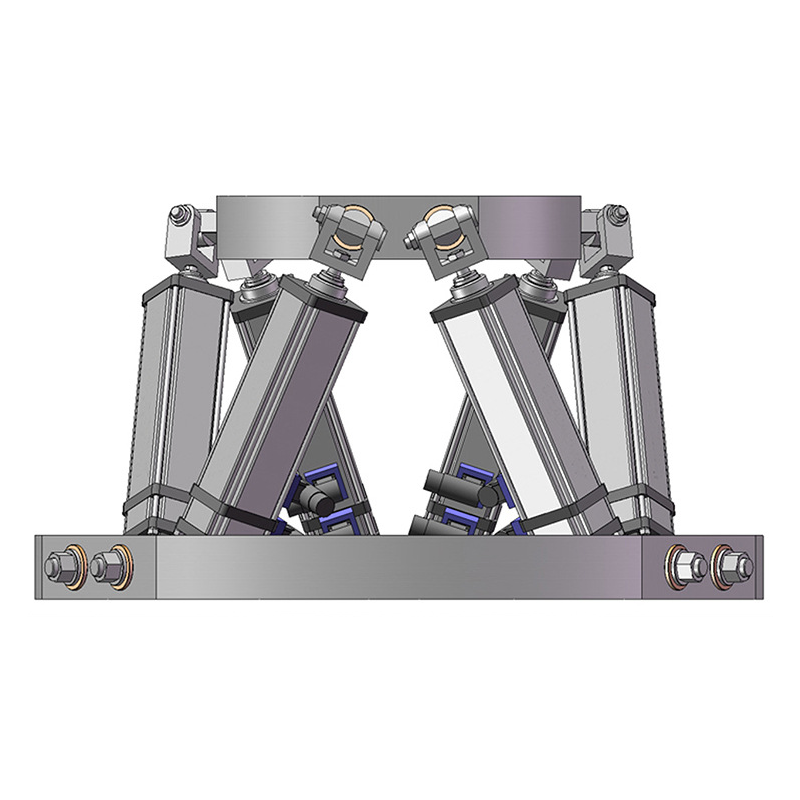
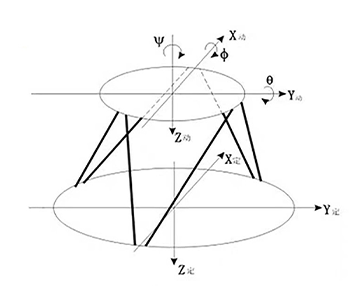
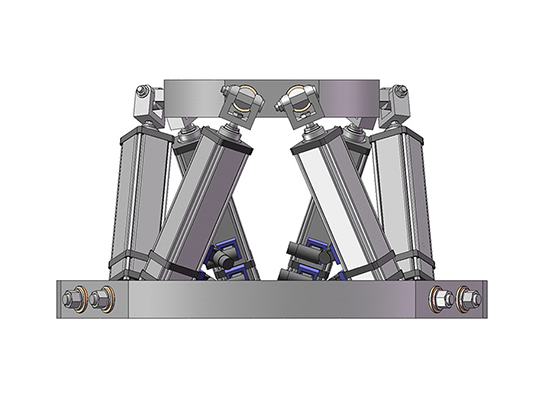
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。

产品参数
| 主要技术指标 | 1、有效载荷:50-30000kg 2、运动参数: | |||||
| 自由度 | 角度或位移 | 速度 | 加速度 | 定位精度 | 重复定位精度 | |
| 俯仰(a) | ±5°~±60° | ≤50°/s | 100°/s2 | 0.03° | 0.03° | |
| 滚转(β) | ±5°~±60° | ≤50°/s | 100°/s2 | 0.03° | 0.03° | |
| 偏航(y) | ±5°~±60° | ≤50°/s | 100°/s2 | 0.03° | 0.03° | |
| 横向位移(x) | ±10mm~±450mm | s1000m/s | ≤2.0g | 0.03mm | 0.01mm | |
| 纵向位移(y) | ±10mm~±450mm | ≤1000m/s | ≤2.0g | 0.03mm | 0.0lmm | |
| 垂直升降(z) | ±10mm~±800mm | ≤1000m/s | ≤2.0g | 0.03mm | 0.01mm | |
| 其他技术指标 | 1、系统响应频率0Hz-20Hz。 2、运行参数≤0.02mm。 3、漂移量:平台系统连续运行12小时以上,任何一个电动缸位置漂移量不会超过0.0025m。 | |||||
| 控制系统 | 1、运动平台控制系统由EtherCAT总线控制、核心硬件自主生产、总线型伺服电机、平台控制软件等组成。 2、运动平台融合了高动态滚珠丝杠机械概念,完善的仿真设计能力,实现了平台更高的运动可靠性能。 3、平台控制软件可非标定制,其中自主开发的核心算法经过多年迭代优化,实现了高精度的运动性能指标,另外可选配体感算法、特效模块算法等,为客户提供了贴近需求的一整套解决方案。 | |||||
| *此参数仅供参考可根据客户需求非标设计定制 | ||||||
产品展示

- 深度定制化支持三/六自由度等平台非标定制,根据客户需求进行深度定制,满足因场地条件、内容场景、外观造型等多方面应用场景需求。
- 产品模块化 全套产品采用模块化设计且核心硬件自主设计制造,使关键零部件组成简单化,主要组件更换简单化,尽可能减少设备因故障问题造成的时间耽误与损失。
- 设计可靠化 面对高精度与重载使用场景有着丰富的设计经验,通过PRO/E、MATLAB仿真软件以及力学分析进行完备的可靠性分析,就机械结构进行专业可靠设计,保证产品的精度要求与安全要求。
- 操作简便化 软件对接简便易用,动作采集软件支持线性编译,保证动作平顺流畅并且提供多种通讯方式的二次开发接口,支持UDP、TCP/I P、串 口 、Wifi等多种通讯方式。
- 持续更新化 公司对核心算法不断测试完善迭代持续优化,上位机软件也在不断更新迭代 ,满足客户网络下载并进行客户端更新,以便让客户长期享受到公司最新开发软件。
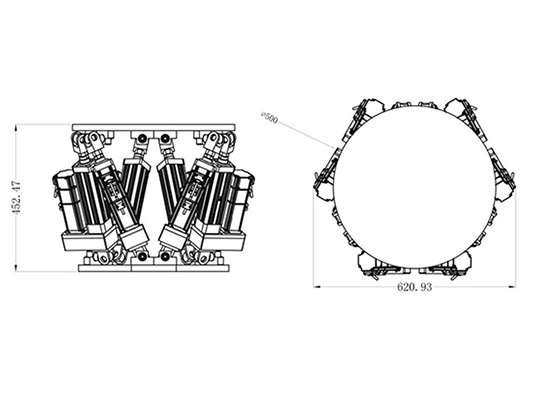
尺寸和接口
应用案例
苏州通又盛电子科技有限公司,专业生产制作,伺服电动缸、直线滑台模组、伺服压机、多维度自由运动平台机器人,机械手系列产品。并提供三菱、松下工控产品、PLC,伺服电机、变频器、触摸屏、导轨、丝杆、减速机系列产品。



合作伙伴

服务
- 售前---助力合理选型:项目评估工程师对接,深入沟通了解使用工况,确认合适的选型和规格,给到客户合理的建议,有效避免生产中出现的问题
- 售中---保障生产交付:专属工程师和业务专员对接,项目主管对过程控制,积极沟通互动,及时发现问题和时效沟通,为生产交付保驾护航
- 售后---及时响应处理:售后有工程人员对接,当天响应;并及时到现场确认、讨论、解决处理问题,满足客户生产需求,避免停工停产现象