








 T1
11 Years
T1
11 Years





XR Hexapod R1树莓派人工智能六足仿生机器人
小R六足仿生蜘蛛机器人树莓派5深度学习编程竞赛WiFi视频AI智能视觉
CNY: 3990-4055
ablity:Monthly Output500
- Paglalarawan ng Produkto
- Product Params
Paglalarawan ng Produkto
XiaoR GEEK Raspberry Pi 人工智能可编程六足机器人仿生蜘蛛智能机器人套件
XiaoR Hexapod R1仿生六足机器人是一款基于树莓派的六足机器人。通过逆向运动学算法,可以生动地模仿自然界中六足动物的步态,非常有趣。
关键技术:Python/六足仿生学/运动学算法/逆运动学算法/树莓派


机器人可以模拟六足生物的前、后、左、右、旋转、平移、mi形斜运动、舞蹈、攀爬等动作。非常适合科学馆、校园科技节、科学演示、机器人竞速等。比赛和机器人技能比赛等活动。
该产品具有AI机器视觉功能,可实现视觉跟踪、颜色视觉识别、人脸视觉识别、二维码视觉识别等人工智能功能,

该产品通过WiFi实现无线远程控制,并使用APP进行控制。您可以在安卓手机和平板电脑设备上安装APP进行控制。

本产品具有视频图像传输功能,可将机器人眼(摄像头)采集的视频图像传输到控制终端进行实时显示。


本产品还提供用于二次开发的SDK代码,开放API供用户调用,二次开发使用广为流行的编程语言Python, 你只需要学习Python的基本编程操作,就可以轻松上手这个机器人动作的二次开发,可以作为电子信息、人工智能、物联网、计算机、自动化等专业高校的人工智能实验室培训平台。
配套课程将从机器人基本参数介绍开始,然后引导您完成机器人运动控制、二次开发环境构建、Python源码分析、机器人运动学/逆向运动学知识。学习有关机器人技术的宝贵知识。
该产品采用Python语言编程,并提供二次开发源码SDK和配套课程资料,易于上手培训开发。
产品名称:XR Hexapod R1 树莓派人工智能六足仿生机器人 | |
| 核心处理器:Quad-core ARM A57@1.43 GHz | 运行时间:1小时 |
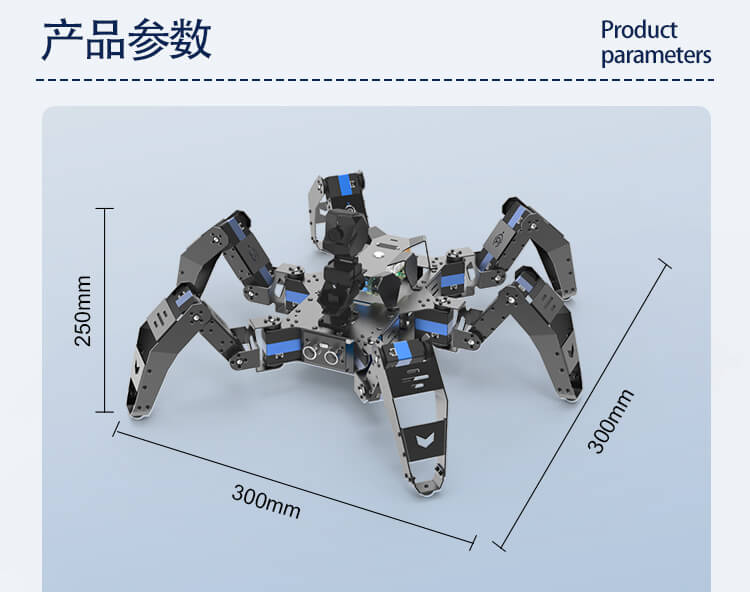
| 尺寸:350*350*250mm | 自重:2.9KG |
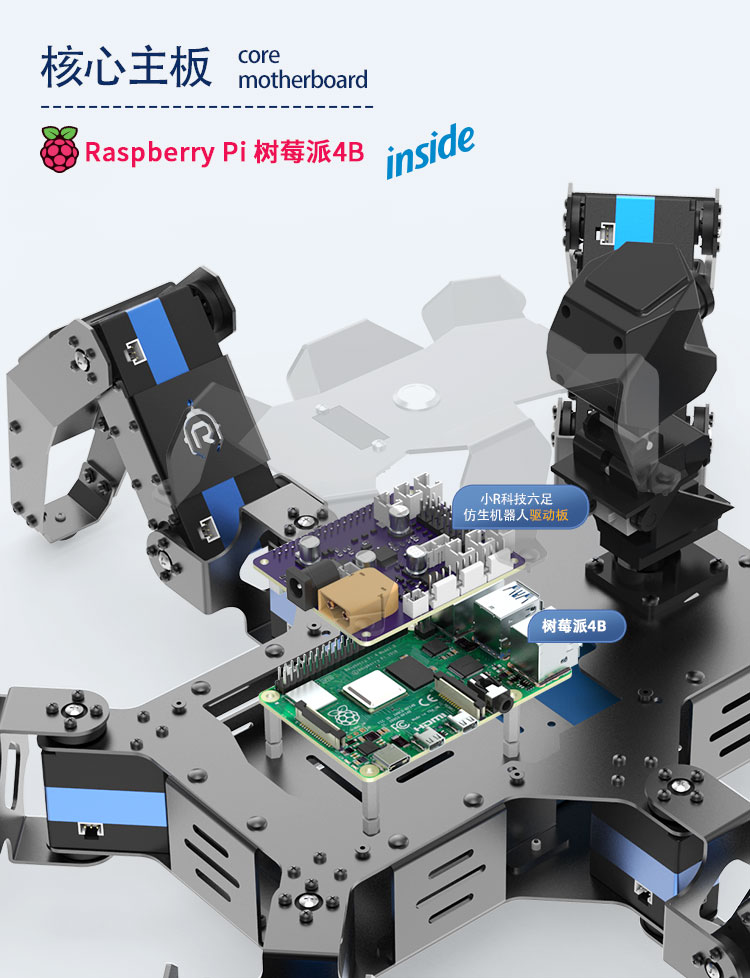
| 遥控方式:AP、PC、无线手柄 | 核心主板:树莓派 4B |
| 编程语言:Python,C++ | 驱动形式:多足驱动 |
| 供电方式:8.4V 4000mAh | 舵机型号:XR-S270 |
| 控制角度:270°±10° | 堵转扭矩:≥35kgf.cm |
| 摄像头:Robot-Eye 3.0 高清摄像头720P 100 万像素 | |
| 接口:USB 2.0 Micro-B, GPIO,12C,12S,SPL, UART | |
| DDR 容量:R4 GB 64-bit LPDDR4 25.6 GB/s | |

