








 T1
11 Years
T1
11 Years





Raspberry Pi Programmable Robot Donkey Cart XR-F3
Deep LearningIntelligent TransportAckermanModelVisual RecognitionRobotRaspberry PiSelf DrivingCar
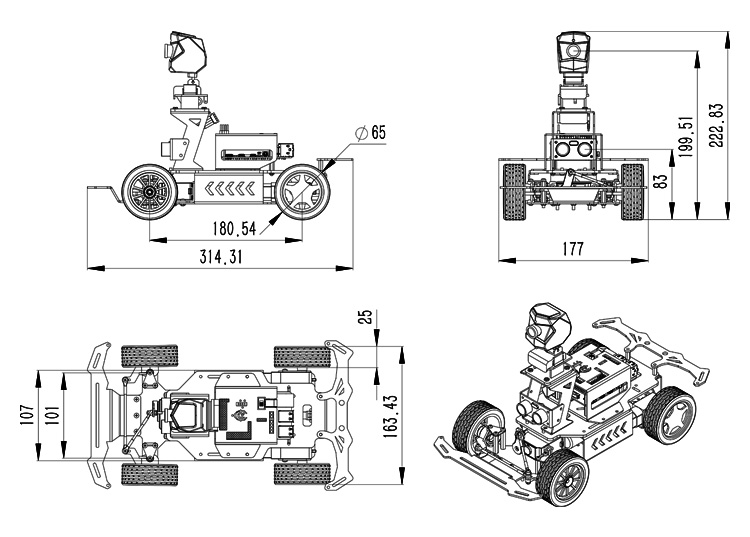
- Product size:314*177*222mm
- Product weight:1200g
- Battery:12V2200mAh
- Battery life:≤120min
USD: 609
ablity:Monthly Output500
- Product Description
- Product Params
Product Description
Core Features
———————— -
The XR-F3 Raspberry Pi self-driving cart is an autonomous driving cart that combines deep learning, neural network, and machine vision technologies. it adopts a front-wheel steering mechanism similar to that of automobiles, i.e., the Ackermann chassis design, which ensures its driving stability and efficient steering performance, making its self-driving mechanism similar to that of the current popular new energy vehicles and it has become one of the popular self-driving projects among academics, tech companies, and research institutes.Translated with www.DeepL.com/Translator(free version)
Starting with understanding the hardware of the cart, this tutorial covers basic usage, getting started with secondary development, exploring the implementation of neural networks in conjunction with hardware, and gradually guiding you into the world of development and deep learning techniques.
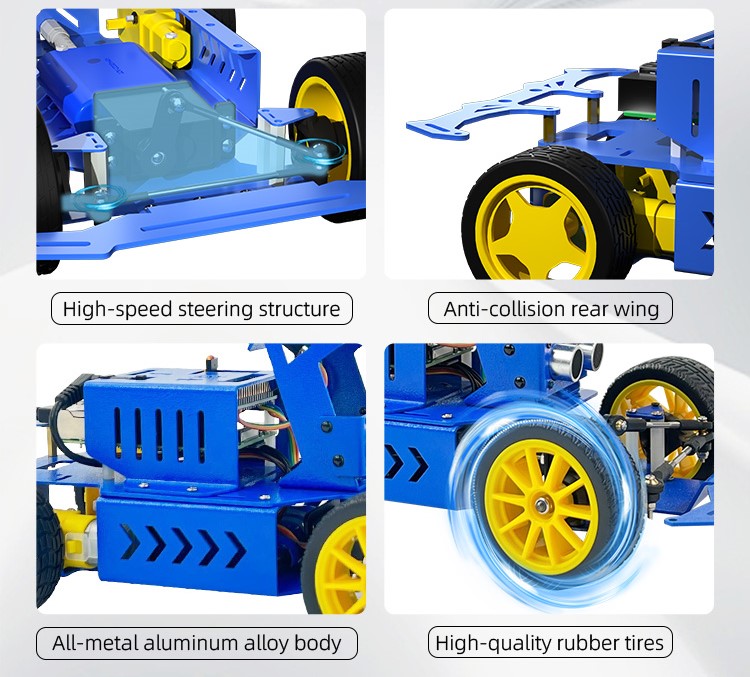
Ackerman steering structure
———————— -
Ackerman steering structure, as the cornerstone of modern automobile design, is an intended standard technology widely used in the new energy vehicle market, especially in the field of autonomous driving. The modified structure achieves precise steering by adjusting the difference in rotation angle between the inner and outer wheels, which becomes the Ackermann steering principle.The XR-F3 Raspberry Pi self-driving car introduces this concept and achieves 100% Ackermann rate, that is, when turning, the turning angle of the inner wheel will be larger than the outer wheel. This rigorous design not only improves the accuracy of steering , and also greatly promotes the efficiency of robot learning and research.
Model training,Autonomous driving
———————— -
The XR-F3 Raspberry Pi self-driving smart robot car is equipped with the Tensorflow neural network framework, which seems to give it the ability to think similar to the human brain, During its working process, the car collects video images in real time through the camera, and records the speed (i.e., the amount of throttle) and steering angle corresponding to each frame. When sufficient data is accumulated, the raw information will be input into the Keras artificial intelligence neural network library, and then processed through the Tensorflow framework to train an accurate model file.

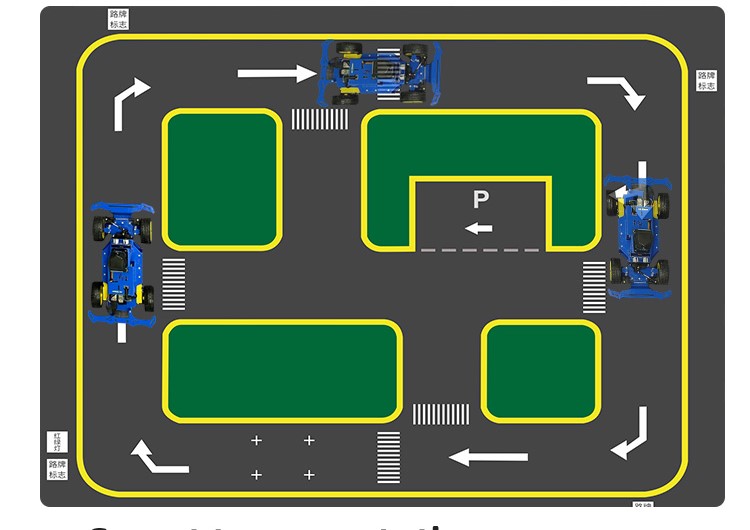
①Sand table automatic driving
In the automatic driving mode, the robot car uses the real-time image captured by its camera to compare it with the data weight stored in the model file, and determines the precise amount of throttle and the specific angle of steering accordingly.
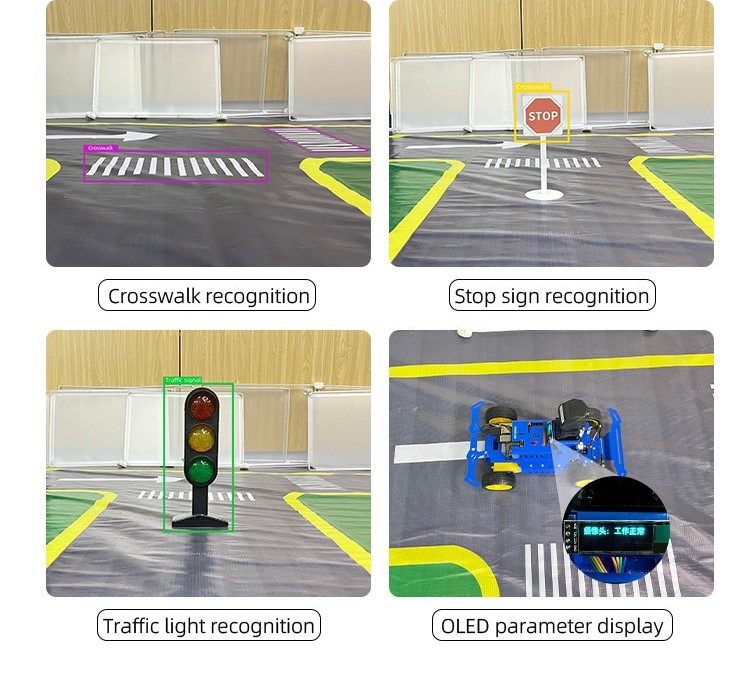
②Smart transportation Road sign recognition
Through the training of the deep learning model library, the autonomous driving system can be realized to make accurate comprehensive decisions on road conditions based on factors such as lanes, traffic signs, and traffic lights.
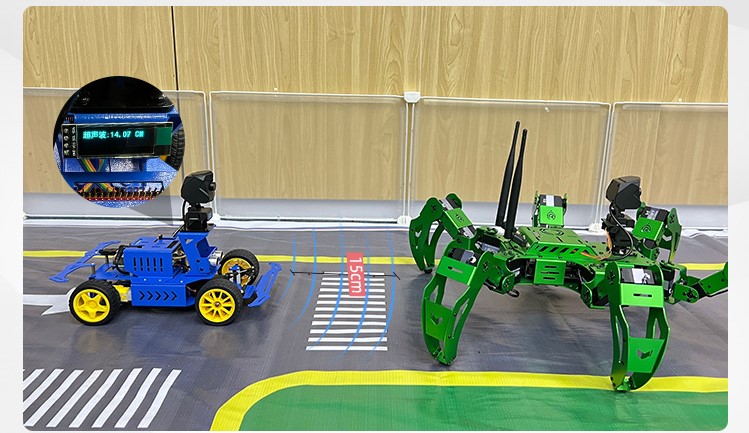
Intelligent anti-collision
———————— -
In autonomous driving mode, the ultrasonic anti-collision function can ensure safe driving of the car. The ultrasonic sensor installed at the front of the car which continuously scans for obstacles ahead and automatically stops when it falls below a safe distance. This function effectively prevents accidents such as rear-end collisions or collisions with fences caused by deviations from the track when multiple vehicles are driving, thereby effectively protecting the vehicle body andthe surrounding environment.
Cross-platform interconnected control
———————— -

Automatic driving sand table
———————— -
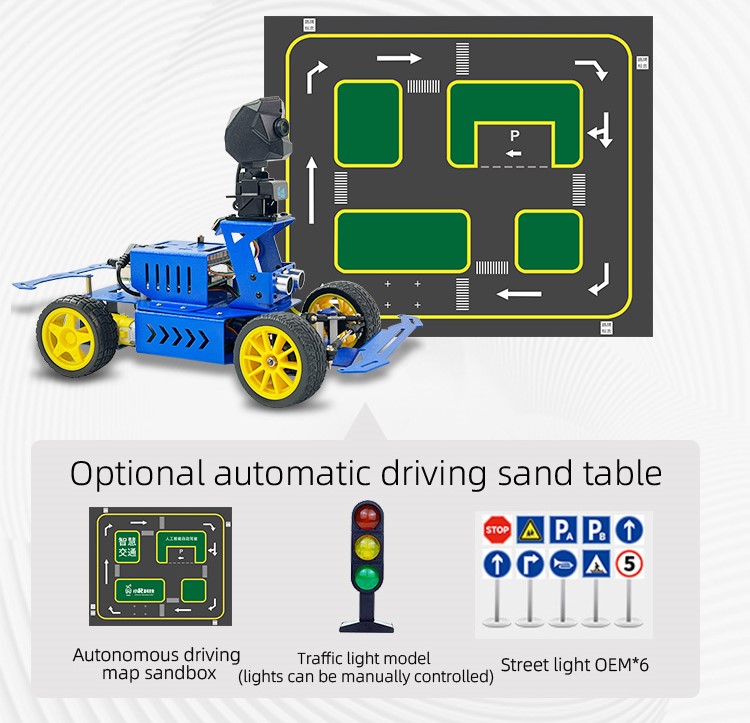
*This model is equipped with an autopilot kit, if you do not need the kit please contact the merchant for advice.
Hardware distribution
———————— -
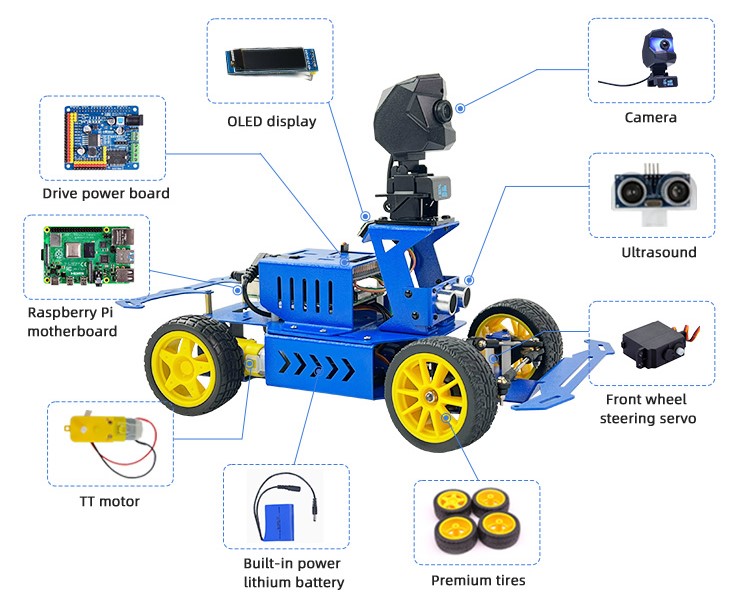
| Product size:314*177*222mm | Product weight: 1200g |
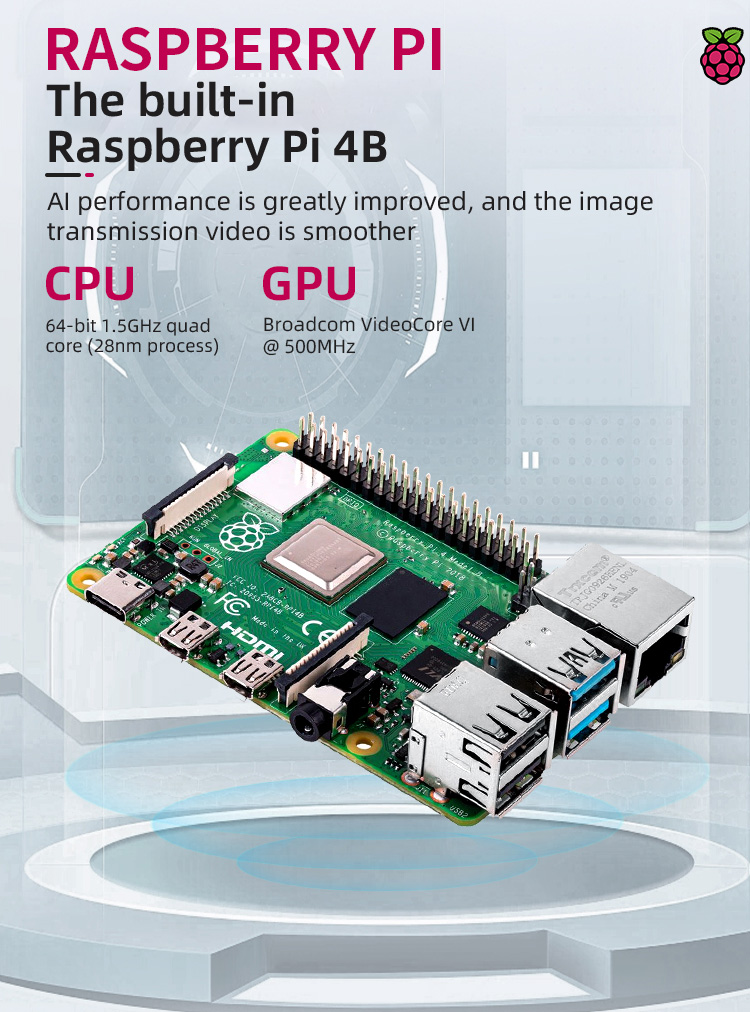
| Product material:All-metal aluminum alloy chassis | Product main control:Raspberry Pi4B development board |
| Communication method:WiFi, Ethernet,handle | Camera:HD 720P driver-free camera |
| Battery:12V2200mAh | Battery life: ≤120min |
| Steering mode: Servo steering | Power source: Rear wheel drive |
| Control method:Mobile phone control/Handle control/PC computer control | |
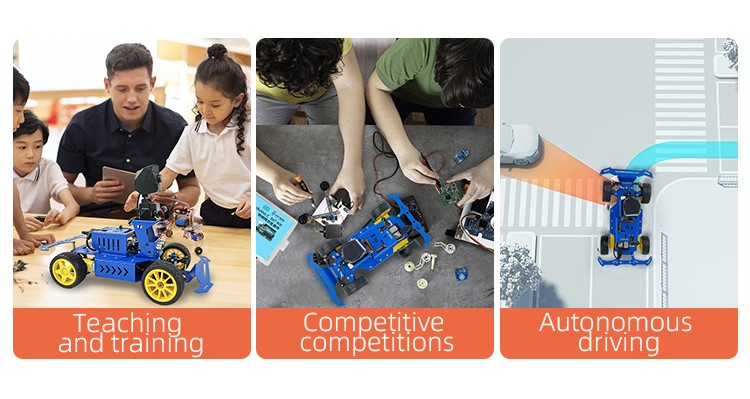
Application scenarios
———————— -
Recommended products

WIFI video intelligent car robot (GFS Robot)
GFS MCU Smart Car Robot Raspberry Pi Maker WiFi Bluetooth Video Compatible with Arduino UNO
collect:0
Micro Servo Series DS-S002M, DS-M005
Micro Servo Series DS-S002M 4.3g Metal Gear Servo DS-M005 2g Plastic Gear Servo
collect:0
MROS Lidar Car ROS Mecanum Wheel Radar Car
ROS Mecanum Wheel Car Moveit Robotic Arm LiDAR Navigation Depth Camera XiaoR
collect:0
ROS SLAM Raspberry Pi Vision Robot
ROS robot Raspberry Pi programming smart car deep vision SLAM mapping navigation Mecanum wheel
collect:0