








 T1
11 Years
T1
11 Years





树莓派智能可编程机器人驴车XR-F3
深度学习智慧交通阿克曼车型视觉识别机器人树莓派自动驾驶小车
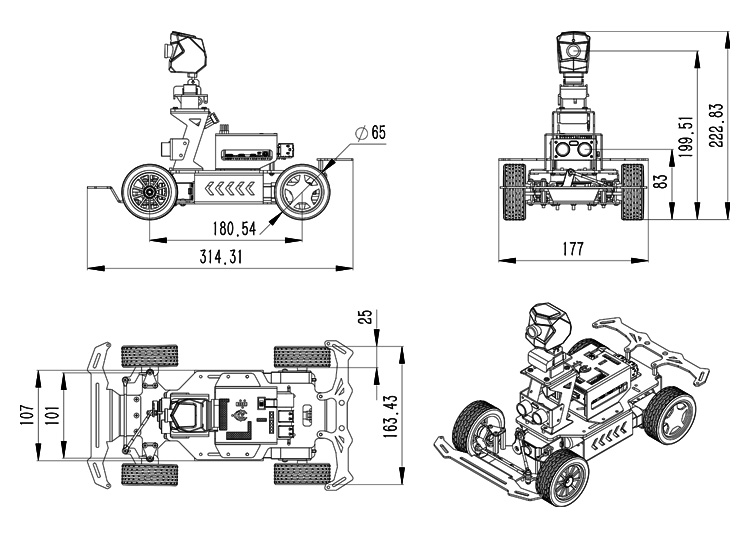
- 产品尺寸:314*177*222mm
- 产品重量:1200g
- 电池:12V 2200mAh
- 续航时间:≤120min
CNY: 3630
ablity:Monthly Output500
- Product Description
- Product Params
Product Description

核心亮点
———————— -
XR-F3树莓派自动驾驶小车,是一款结合了深度学习、神经网络以及机器视觉技术的自动驾驶小车。采用了与汽车相似的前轮转向机制,即阿克曼底盘设计,确保了其行驶稳定性和高效的转向性能,使其自动驾驶机制与当前流行的新能源汽车相似已成为学术界、科技企业和研究机构中受欢迎的自动驾驶项目之一。
不仅适合电子信息、自动化和人工智能等相关专业的学生学习神经网络算法、深度学习技术以及Linux开发技术,还旨在通过亲身实践和引人入胜的体验,深化用户对人工智能的理解。
本教程从了解小车的硬件入手,涵盖了基本使用方法、二次开发入门,探索神经网络与硬件结合的实现,逐步引导您进入开发和深度学习技术的世界。


阿克曼转向结构
———————— -
阿克曼转向机构,作为现代汽车设计的基石,是新能源汽车市场中广泛采用的一项标准技术,特别在自动驾驶领域内备受青睐。该结构通过调整内外轮的转角差异实现精准转向,称为阿克曼转向原理。XR-F3树莓派自动驾驶小车引入了这一概念,实现了100%的阿克曼率,即在转弯时,内轮的转角将大于外轮,这种严谨的设计不仅提高了转向的精确性,也大大促进了机器人学习和研究的效率。

模型训练 自动驾驶
———————— -
XR-F3树莓派自动驾驶小车搭载了Tensorflow神经网络框架,仿佛赋予了它与人类大脑类似的思考能力。在其工作过程中,该小车通过摄像头实时采集视频画面,并记录下与每帧画面相对应的速度(即油门量)和转向角度。当积累了充足的数据后,这些原始信息会被输入到Keras人工智能神经网络库中,随后通过Tensorflow框架进行处理,以此训练出精准的模型文件。

①沙盘自动驾驶
自动驾驶模式下,机器人利用其摄像头捕捉的实时画面,与存储在模型文件中的数据权重进行对比,据此决定油门的精确量和转向的具体角度。
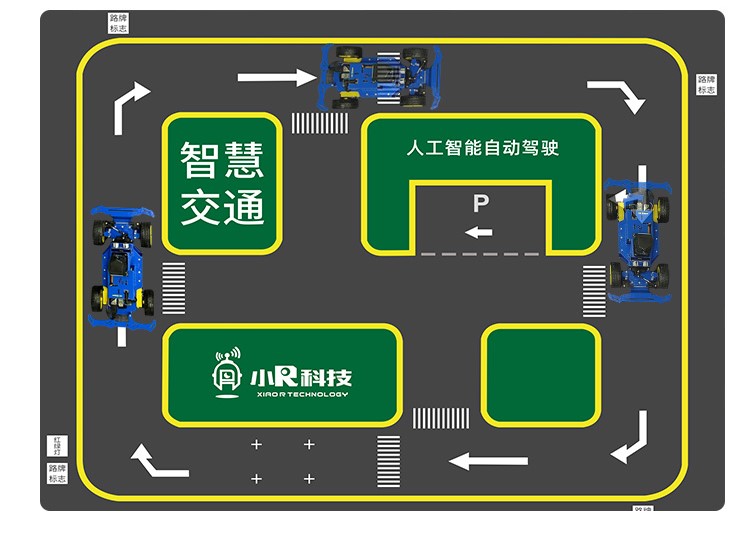
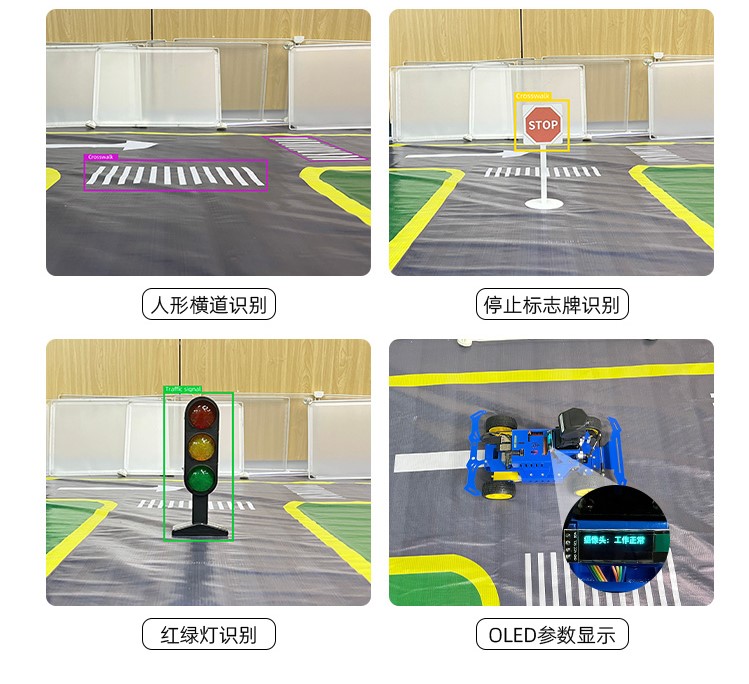
②智慧交通 路标识别
通过深度学习模型库的训练,可实现自动驾驶系统根据车道、交通标志和红绿灯等因素,作出准确的路况综合决策。
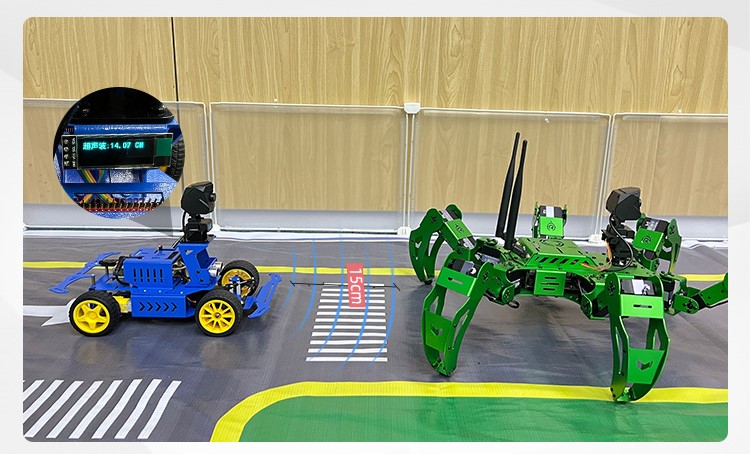
智能防撞
———————— -
在自动驾驶模式下,超声波防撞功能可保障小车安全行驶。前端装配的超声波传感器不断扫描前方障碍,低于安全距离时自动停止。此功能有效预防多车行驶时的追尾事故或偏离轨道导致的撞击围栏,保护车体与周围环境。
跨平台互联控制
———————— -

配备自动驾驶沙盘
———————— -
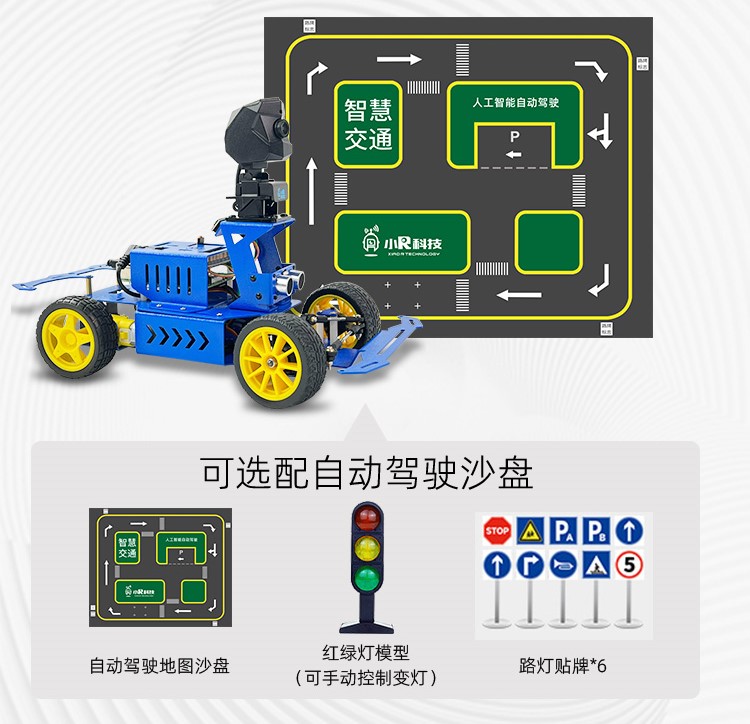
*此款已配备自动驾驶套件,如不需要套件请联系商家咨询
硬件分布
———————— -

| 产品尺寸:314*177*222mm | 产品重量:1200g |
| 产品材料:全金属铝合金底盘 | 产品主控:RaspberryPi4B开发板 |
| 通信方式:Wifi、以太网、手柄 | 摄像头:高清720P免驱摄像头 |
| 电池:12V 2200mAh | 续航时间:≤120min |
| 转向方式:舵机转向 | 动力源:后轮驱动 |
| 控制方式:手机控制/手柄控制/PC电脑控制 | |
应用场景
———————— -
