








 T1
12 Years
T1
12 Years


思岚S3 激光雷达
采用dToF技术40m测量半径 IP65防尘防水S3 激光雷达
CNY: 6510
ablity:Monthly Output300
- Deskripsi Produk
- Product Params
Deskripsi Produk
产品描述:
DF-LRS3 激光雷达
体积更小,性能更好
40m测量半径
32k采样频率
0.1125°角度分辨率
室内外可用
IP65防尘防水
眼睛安全级别: Class 1

S3是新一代低成本而为激光雷达。它具有每秒32000次的高速激光测距采样能力,并采用了非接触式的能量和信号传输技术,克服了传统激光雷达的寿命限制,可长时间可靠的稳定运行。S3为二维激光测距雷达,可以实现半径40m的二维平面内进行360度全方位的激光测距扫描,并产生所在空间的平面点云地图信息。这些点云地图信息可用于地图测绘、机器人定位导航、物体/环境建模等实际应用中。S3的典型扫描频率为10Hz(600rpm),在10Hz的扫描频率下,32K的采样频率可以实现0.1125°的角度分辨率。
系统构成示意图

工作原理
S3采用了激光飞行时间测距技术,再配合自研的高速激光采集处理机构,它可进行每秒32000次的测距动作。每次测距过程中,S3将发射经过调制的红外激光信号,该激光信号再照射到目标物体后产生的反光将被S3的激光采集系统接收,然后经过嵌入在S3内部的处理器实时解算,被照射到的目标物体与S3的距离值以及当前的夹角信息将从通讯接口中输出。
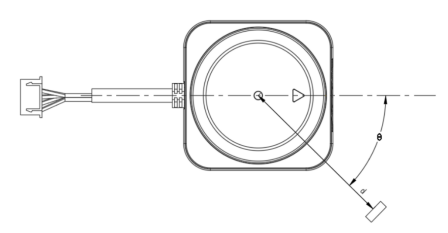
S2工作原理示意图
在电机机构的驱动下,S3的测距核心将顺时针旋转,从而实现对周围环境的360度全方位扫描测距检测。
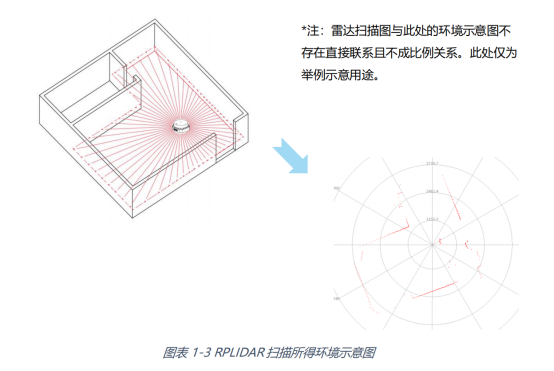
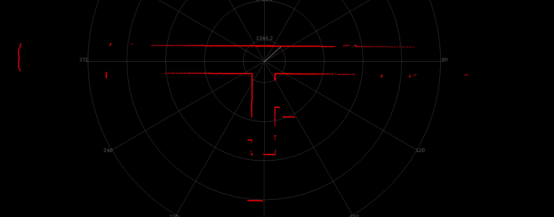
S3扫描所得环境示意图
* 雷达扫描图与此处的环境示意图不存在直接联系且不成比例关系。此处仅为举例示意用途。
产品特点
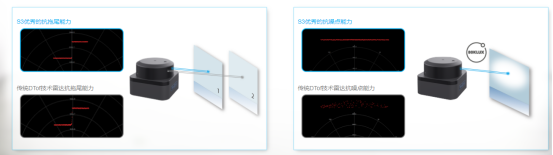
1 dToF技术
拥有极致的环境光抗击能力和测量稳定性,带来优异的测距表现。
2 40m测距半径
即使在70%的反射率下,测量半径也可稳定达到40m,满足中远距离测距需求
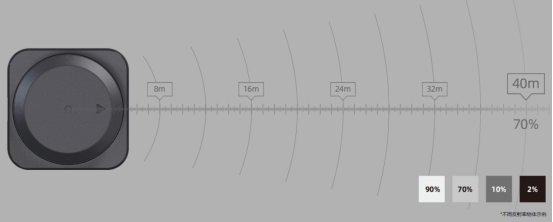
3 . 安全保障,低反射率确保15m测距半径
S3在面对深色等具有挑战性的低反射率物体下,测距表现同样优秀,在10%反射率下,可达15m。

4 . 32,000次/秒 高速采样能力
S3在实时感知、精准定位和目标检测方面具备卓越的能力,高速采样频率,获得的点云数据更多,建图更快,更准确。
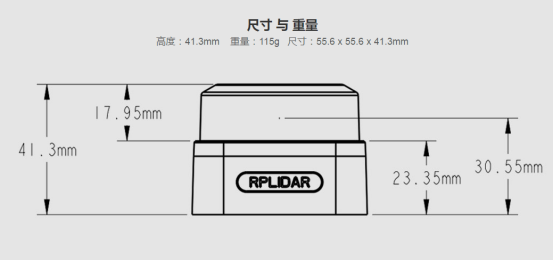
5 .又小又薄,性能更好
S3机身小巧紧凑,机身整体高度仅4cm,突破空间限制,百搭各种应用场景,高性价比。

6 .支持各类型开发平台
为用户提供了可在x86 Windows、x86 Linux 、 arm Linux 等平台下运行的SDK开发包,帮助他们在不同的操作系统和架构上进行开发和集成。

型号 | S3 |
应用场景 | 适合室内外环境,可靠的抗强光能力(≥80KLux) |
测量半径 | 白色物体:0.05 - 40m (70%反射率) |
黑色物体:0.05 - 15m (10%反射率) 0.05 - 5m (2%反射率) | |
测量盲区 | 0.05m |
采样速度 | 32000次/秒 (32KHz) |
俯仰角 | 0°~1.5° (特殊范围需求可定制) |
扫描频率 | 典型值:10Hz(10Hz - 20Hz可调整) |
角度分辨率 | 典型值:0.1125°(0.1125° - 0.225°,取决于扫描频率) |
通讯接口 | TTL UART |
通信速率 | 1M |
测距分辨率 | 10mm |
测量精度 | ±30mm |
Angular Range | 360° |
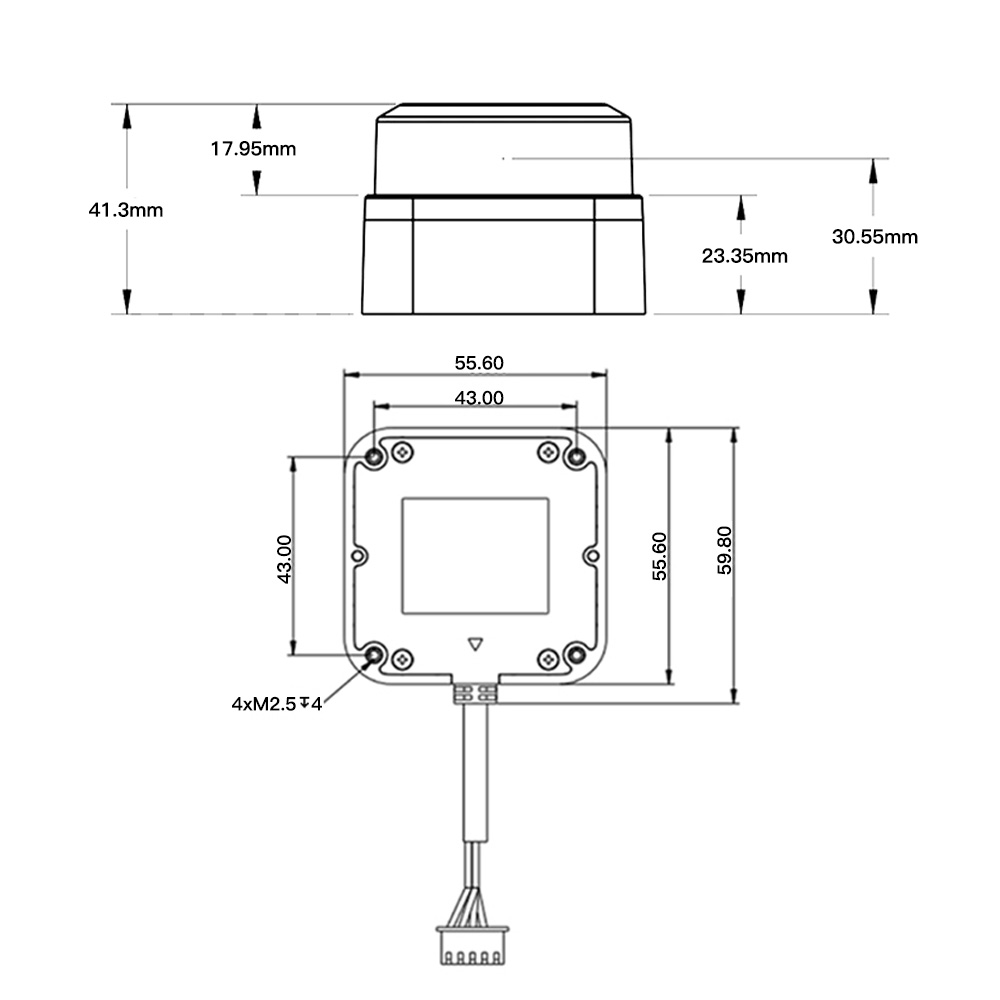
Size | 55.6 * 59.8 * 41.3 mm |
Weight | 115g |
应用场景
通用的同步定位与建图(SLAM),环境扫描与3D重建需要进行长时间连续工作的服务机器人、工业领域家用看护/清洁机器人的导航与定位通用的机器人导航与定位智能玩具的定位与障碍物检测。
服务机器人导航避障
AGV小车障碍物检测与规避
停车场车位监测
低速无人机环境感知和自主移动
多点触碰与大屏互动
无人机测绘与避障
ROS小车/教育小车建图、避障
环境扫描与3D重建
