T1
13 Years
T1
13 Years



BlueROV2 underwater robot
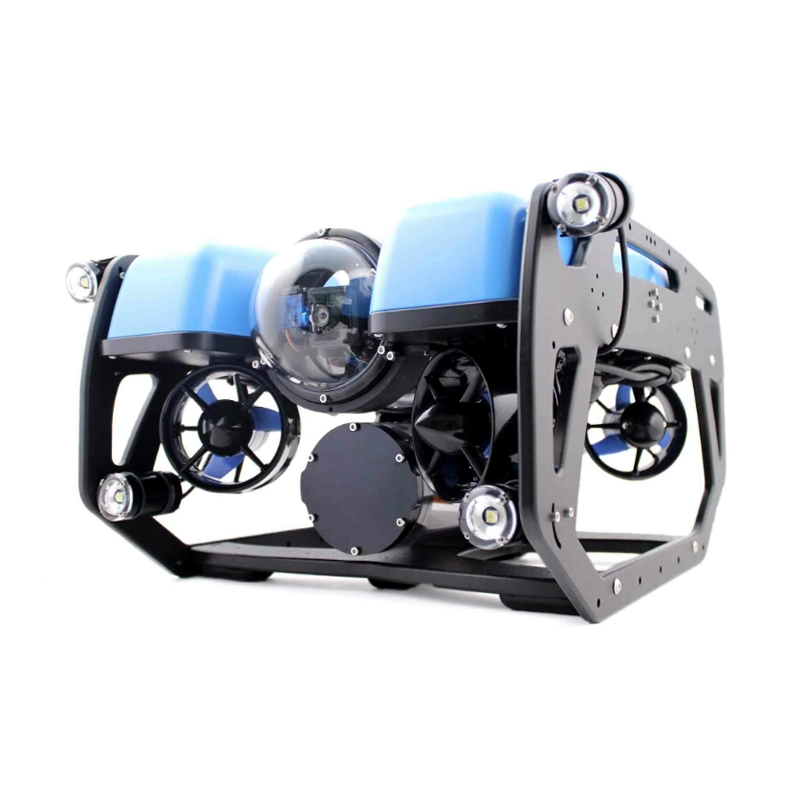
BlueROV2 underwater drone submersible is an affordable and high-performance 6-propeller underwater robot
- Net weight:9~11kg
- Net buoyancy:0.2 kg
- Load capacity:1.0kg
- Maximum diving depth:100 meters
USD: 8411
ablity:Monthly Output200
- Paglalarawan ng Produkto
- Product Params
Paglalarawan ng Produkto
BlueROV2 underwater robot
Product Description
BlueROV2 is the world’s most affordable high-performance ROV. Has a 6 thruster vector configuration. The electronics and software of BlueROV2 are all open source and sufficiently scalable, making it an ideal ROV for inspection, research and adventure.
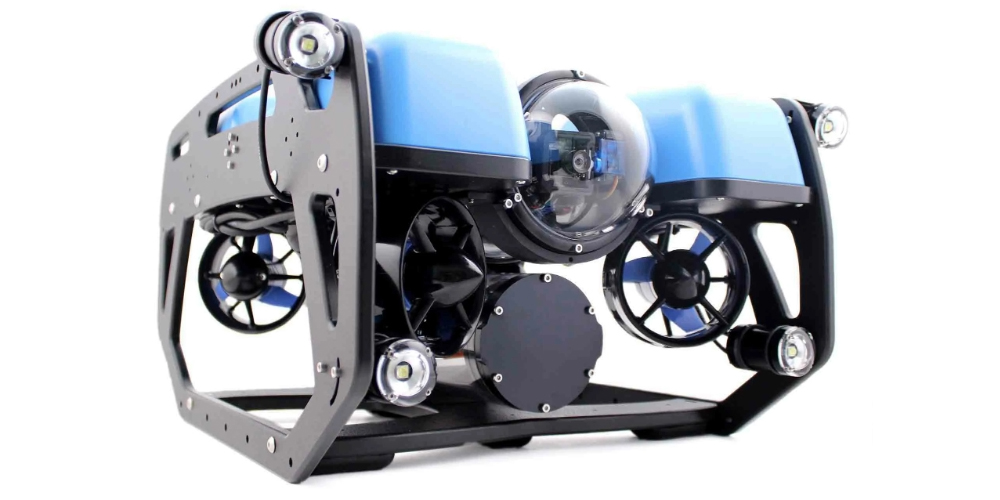
Live HD cameras and lighting
A high-definition (1080p, 30fps) wide-angle low-light camera is installed on the front of BlueROV2. The camera angle can be controlled through the PTZ. When using a single-degree-of-freedom gimbal, even if the ROV is in a horizontal state, the operator can control the tilt of the camera through the gimbal to look up or down. BlueROV2 also supports dual-channel gimbal expansion to obtain a wider field of view. The ROV can be configured with two or four dimmable lights, providing up to 6,000 lumens of brightness to illuminate the deep ocean.
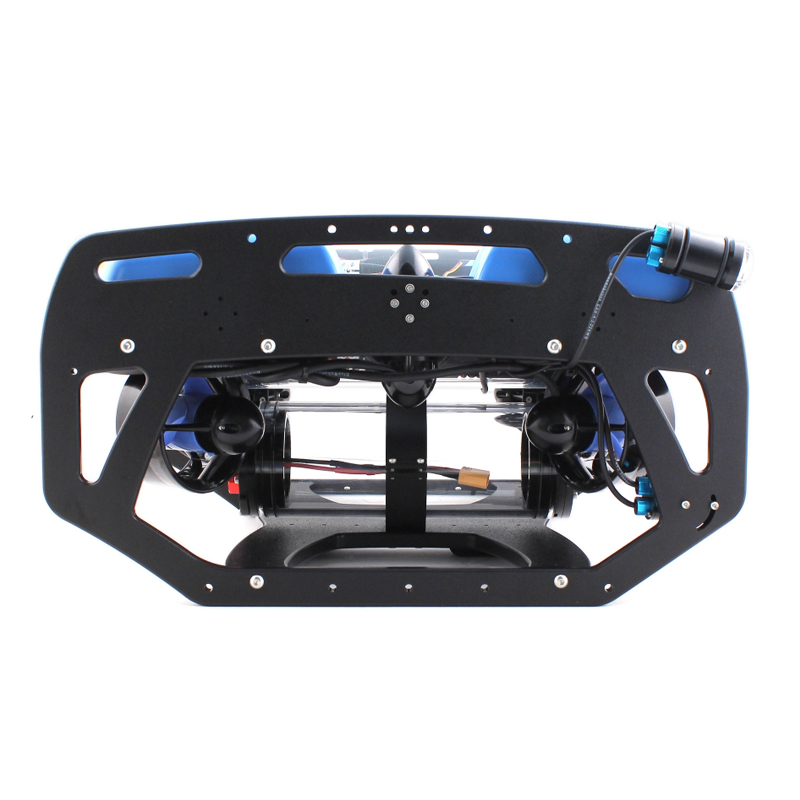
Vector thruster configuration and heavy configuration
ROV thrusters use a vector arrangement with a high thrust ratio, enabling precise movement in any direction. The standard version of the ROV has 6 thrusters, and the heavy-duty version has 8 thrusters, achieving six degrees of freedom control and greater load capacity.
Depth level
BlueROV2 is designed for a water depth of 100 meters (330 feet). The actual pressure test was 300 meters, and the indicators of each module were normal.
Modular frame design and scalability
BlueROV2 is an extremely scalable observation-grade ROV with an open frame that carries electronics and battery boxes, thrusters, buoyancy foam and ballast. This simple design is durable and expandable, making it easy to carry additional accessories including cameras, forward-looking sonar, underwater GPS and more. Users can design their own framework to replace BlueROV's framework to realize any style of underwater robot!
Open source control software and user interface software
BlueROV2 uses ArduSub to control the firmware. ArduSub, part of the ArduPilot project, brings numerous features and a wide range of users to ROV. Ashore, the operator controls the ROV via a laptop computer and gamepad controller. The portable computer is equipped with the open source GroundControl application. GroundControl provides users with real-time video streams and sensor information.
Product parameters
Basic parameters
| Length: 457 mm | Width: 338mm |
| Height: 254 mm | Net weight: 9~11kg |
| Net buoyancy: 0.2 kg | Load capacity: 1.0kg |
Performance parameters
| Maximum diving depth: 100 meters | Maximum test depth: 130 meters |
| Operating water temperature: 0~40℃ | Maximum forward speed: 1.5 meters/second |
| Forward thrust: 9KGF | Vertical thrust: 7KGF |
| Lateral thrust: 9KGF |
Lamp
| Brightness: 1500Lux dimmable control | Light speed angle: 135° adjustable angle |
Zero buoyancy cable
| Diameter: 7.6 mm | Length: 25~300 meters |
| Tensile strength: 45KGF | Breaking strength: 160KGF |
| Strength support: Kevlar and buoyancy materials | Buoyancy in fresh water: neutral |
| Buoyancy in sea water: floats slightly |
Camera and PTZ
| PTZ range: 90° up and down | Camera angle: 110° |
| Camera sensitivity: 0.01lux | Camera resolution: 1080P |
Battery
| Battery life: 3 hours (an additional battery can be purchased, and the battery can be replaced in 30 seconds to increase battery life) |
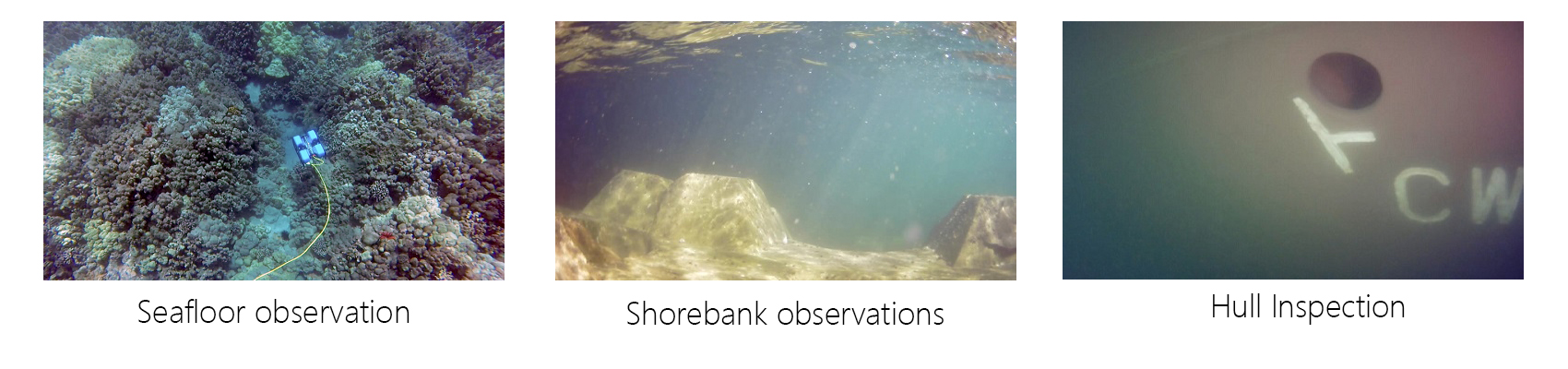
Application areas