











Product Description
AQUAHAWK™ is a compact, untethered Hovering Autonomous Underwater Vehicle (HAUV) designed for rapid deployment and extended-duration missions. The name "AQUAHAWK" reflects its agility, precision, and sharp perception in challenging underwater environments. Engineered to reduce risk and operational costs, AQUAHAWK™ delivers high-quality geo-referenced hydrographic data and video autonomously—without the need for human divers or tethers.
Product Features

Equipped with an advanced AI-driven autonomy engine, AQUAHAWK™ enables true "launch-and-leave" operations. It can independently identify, localize, and follow subsea structures even under low-visibility or dynamic water conditions.

Built with robust CPU and GPU cores onboard, the vehicle processes sensor inputs in real time, enabling instant decision-making and the application of machine learning algorithms for intelligent navigation.

With real-time image enhancement, AQUAHAWK™ provides crystal-clear underwater visuals for better situational awareness and post-mission analysis.
Stable Hovering & Precision Control
The vehicle features six degrees of freedom with advanced control algorithms, allowing it to hover in place and perform complex maneuvers in confined or dynamic environments.
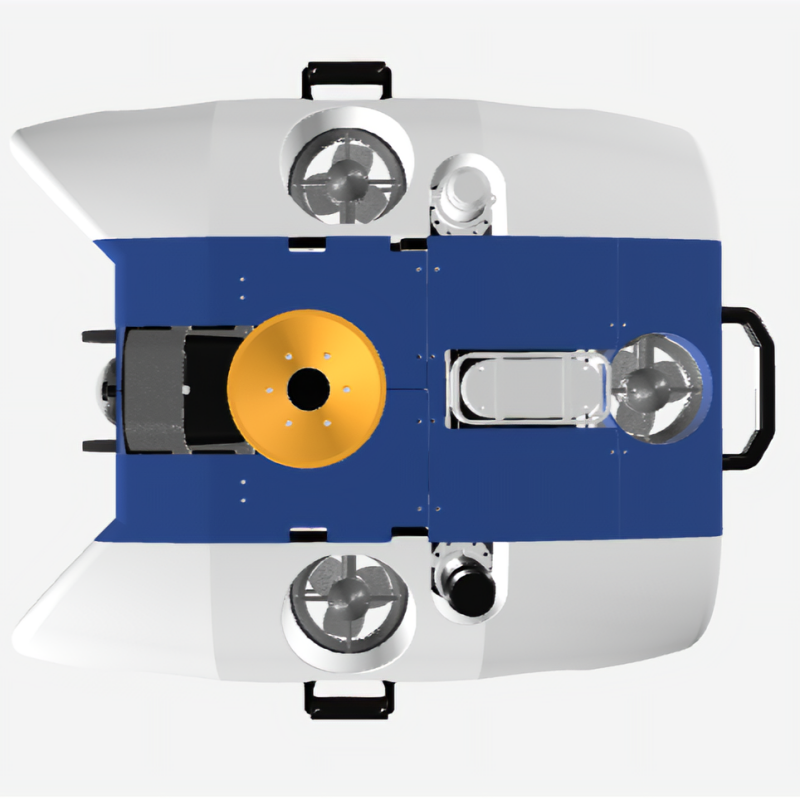
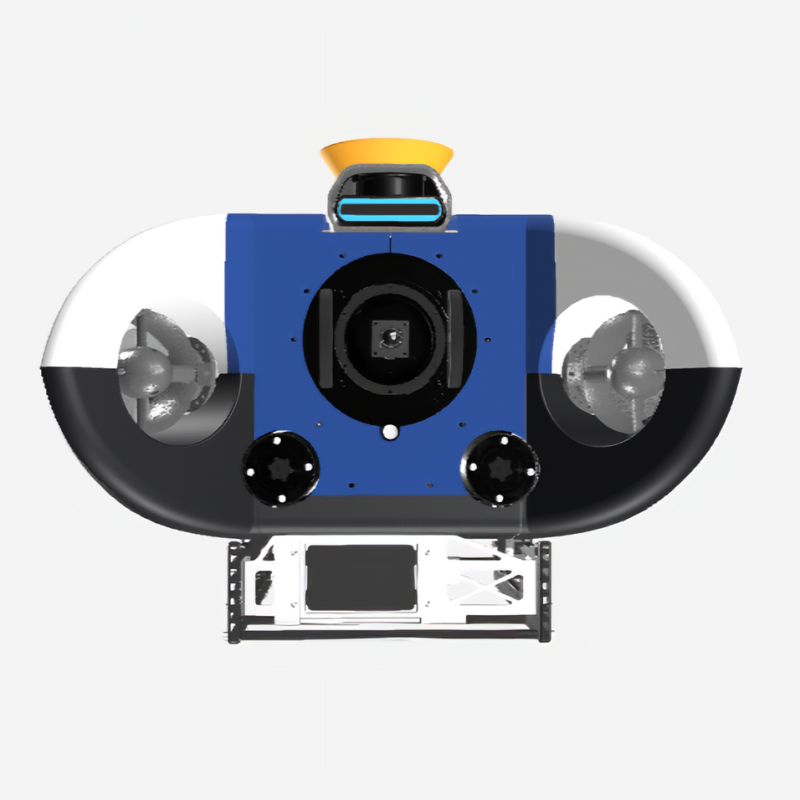
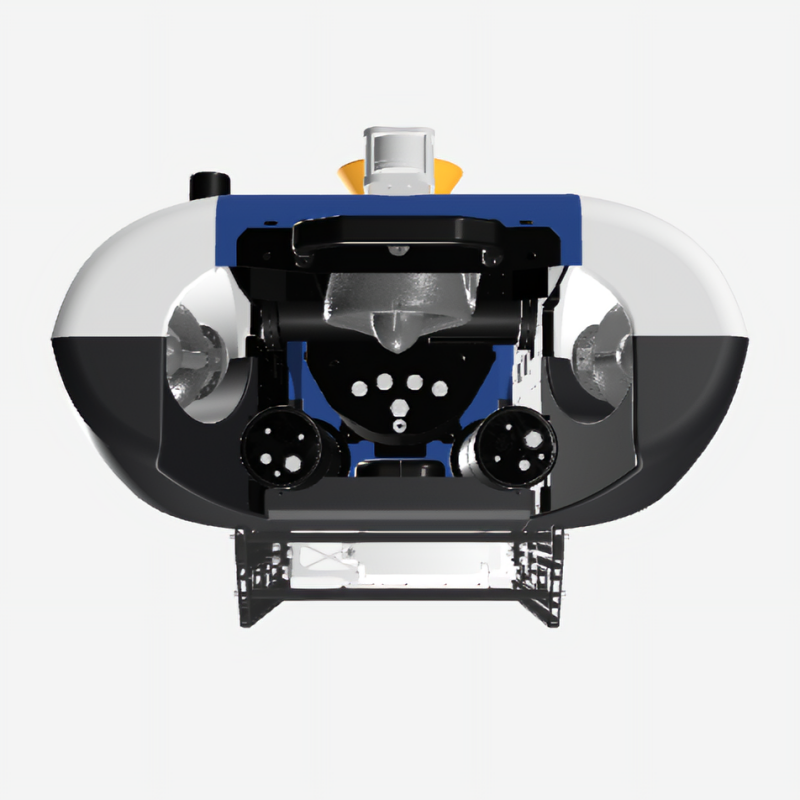
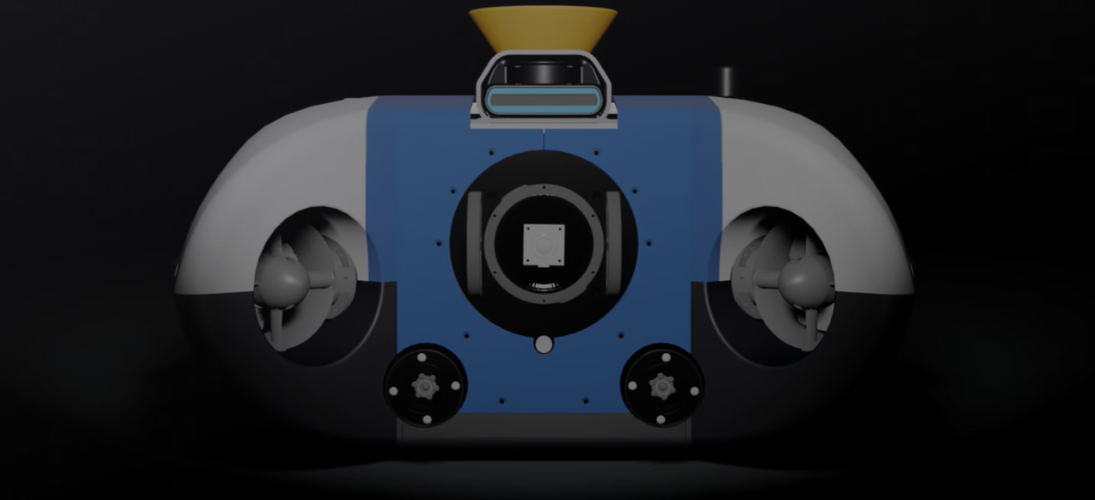
Structure Diagram
Product parameters
Customer Case
Land Reclamation Site Surveys
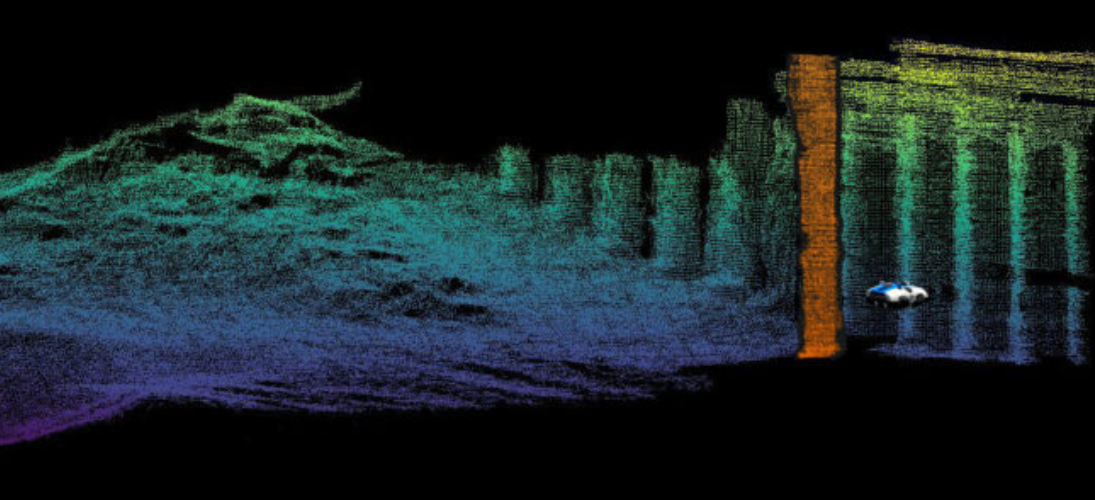
Performed full-coverage sonar inspections of over 2,000 m² rock dumps at land reclamation sites, delivering real-time, geo-referenced 2D sonar mosaics that pinpointed voids affecting backfilling works
Single Buoy Mooring (SBM)
Used to capture high-resolution data of single buoy mooring in challenging real-world conditions, demonstrating the potential of new underwater monitoring technologies.
Floating Solar PV Monitoring
For 4 years, AQUAHAWK™ has been used to monitor floating solar farms, enabling rapid, safe and efficient situation assessments.
AquaCore Robotics offers Robotics-as-a-Service (RaaS) offerings, enabling customers to access advanced autonomous underwater inspections without having to invest in equipment themselves, reducing resources and maintenance costs for underwater assets.
Technical Data
Operation Time: Up to 7 hours of continuous operation with two 500Wh batteries
Installation: Quick-to-use design with self-contained power source, no external generator required
Operation Mode: Supports both wired and wireless modes, with automatic structure tracking capability
Data Collection: Multi-layer and precise coordinate data collection, ideal for pole, anode system, and structural thickness measurement
Control System: Fast-responsive computer control system, enabling stable movement even in challenging underwater environments



