Product Description
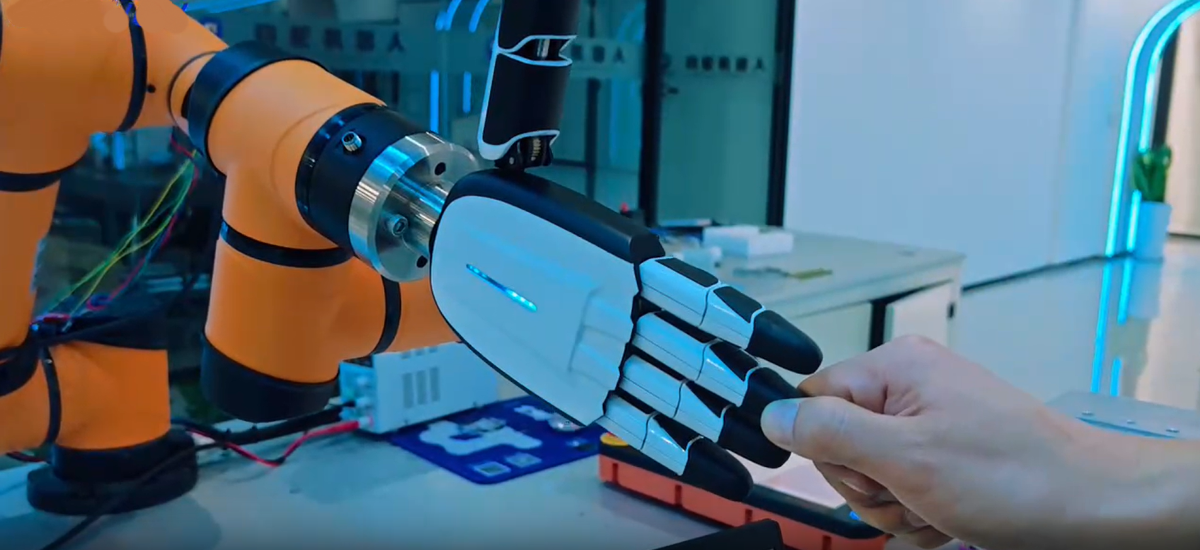
The Smart Bionic Dexterous Hand features a 16-DOF precision actuation system with fully actuated joints on all five fingers, enabling complex, coordinated multi-finger manipulation. It integrates a high-resolution tactile sensor array capable of real-time sensing of contact pressure, distribution, and surface topology. Designed for high payload capacity and fast dynamic response, it supports versatile control interfaces and is compatible with major robotic platforms, making it ideal for research in grasping, dexterous manipulation, and HRI.
Product advantages:
High degree of freedom: 16 degrees of freedom precision drive system, fully simulates the natural movement of human hands, supports a variety of complex gestures and flexible operations, suitable for multi-finger coordinated control and fine work needs.
High-resolution tactile sensor: equipped with a high-sensitivity, multi-point tactile sensor array, it can perceive the pressure distribution, contact position and surface contour in real time, and improve the perception and control ability of grasping objects.
Powerful grip: Optimized drive and mechanical structure design, taking into account both strength and precision, can firmly grasp objects of different sizes and shapes, and meet the load requirements of multiple scenarios.
Five-finger joints: Each finger adopts multi-joint active drive, which truly restores the tendon structure of the human hand, and realizes flexible linkage and anthropomorphic movement performance of all joints.

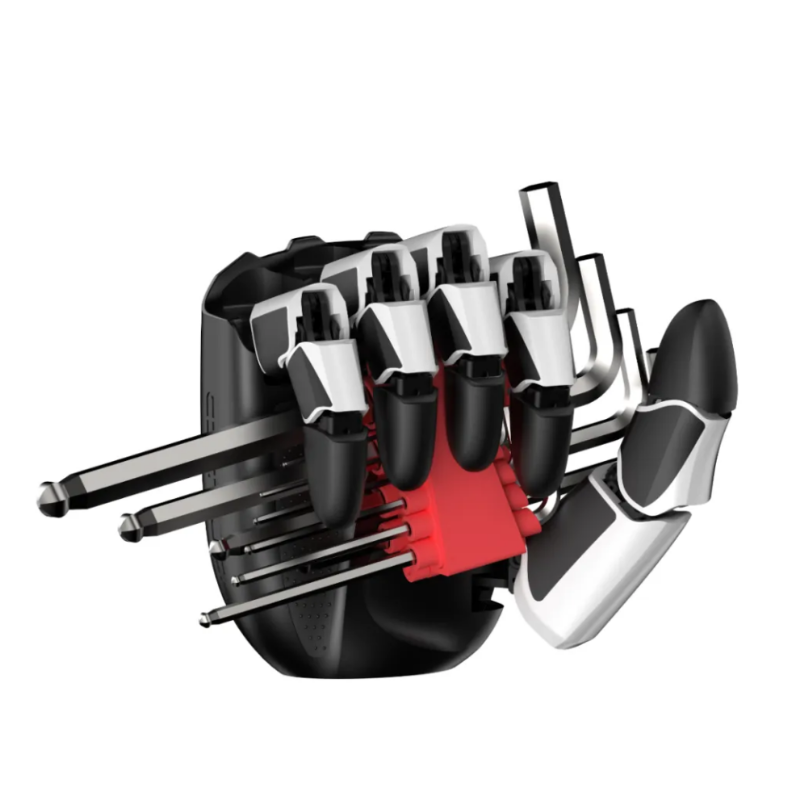
This intelligent robotic Agile Hand integrates multidisciplinary technologies such as bionics, mechatronics,
materials science, biomedicine and information technology, and is
equipped with a self-developed somatosensory control system,
giving it flexibility and control capabilities
comparable to human hands.
It integrates 6 independent execution units,
supports independent movement of each finger,
and the thumb has two-way freedom,
further enhancing the ability of complex grasping and fine manipulation.
Functional Features

1. High Degrees of Freedom
This bionic hand features 16 degrees of freedom, including lateral movement of the index finger and a wide range of motion for the thumb, enabling natural and complex human-like movements. It supports a variety of precise grasping modes such as pinch, side grip, and power grasp, making it ideal for tasks requiring advanced dexterity in robotic applications.

2. High-Resolution Tactile Sensors
Each finger can be equipped with a high-resolution 3D force tactile sensor, capable of detecting normal and tangential forces with great precision. These sensors provide real-time feedback on contact force and object texture, significantly enhancing the hand’s ability to perform stable gripping, adaptive manipulation, and intelligent force control.

3. Powerful Gripping Force
The hand is designed with optimized transmission mechanics and high-performance micro-actuators, delivering a maximum grip force of 25N across the four fingers and up to 35N for the thumb. This strong force output, combined with precise motion control, ensures secure handling of medium-weight and irregular objects while maintaining high operational safety and accuracy.

4. Fully Actuated Finger Joints
Each finger is constructed with multiple joints, individually driven by precision gears and miniature motors, allowing for fully independent control of every joint. This design enables realistic finger articulation and smooth coordination, replicating the natural flexion and extension of a human hand for highly biomimetic interaction and control.
Application
The 16-DOF Agile Hand can be used in industrial manufacturing and automated assembly, medical and rehabilitation, service robots and human-machine collaboration, hazardous environment operations, education and scientific research, e-commerce logistics and sorting, agriculture and food processing, etc.:
The fastest grasping beat of the whole stroke is 0.7S

Can carry robotic arms/humanoid robots to perform complex tasks.
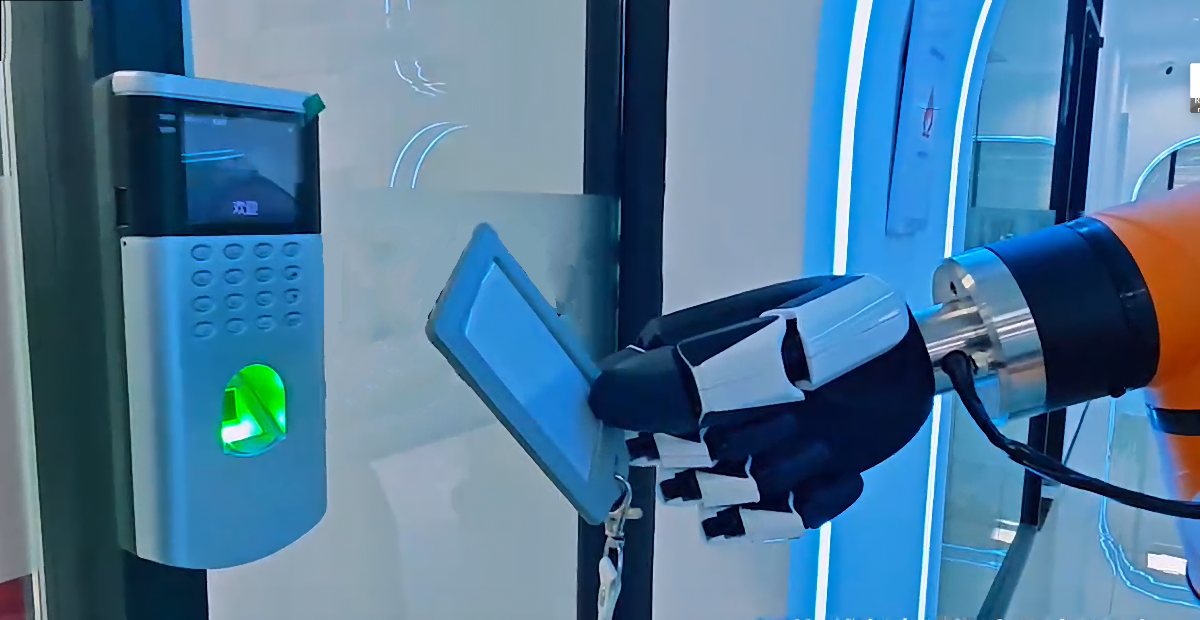
Support tactile system feedback
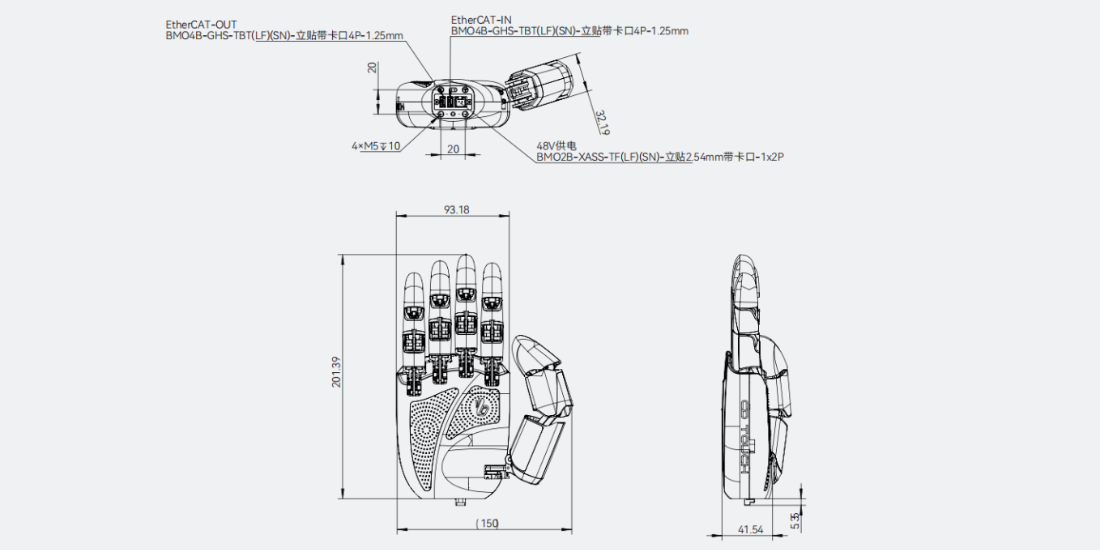
Dimensional drawing
Product parameters
Model number | CDH-MO-5-16-E0 |
operating voltage | DC12V-48V |
articularicular number | 16 |
quiescent current | 0.23A(24V) |
Maximum grip strength of the thumb | 35N |
Maximum current | 5A(24V) |
Maximum four-finger grip | 25N |
communication interface | EtherCAT |
payload | 15kg |
kinesthetic system | be in favor of |
Thumb Rotation Range | ≤90° |
trigger force | ≥ 50g |
Thumb Bend Angle | ≤ 80° |
Pressure range | 50-2000g |
Four-finger bending angle | ≤90° |
response time | ≤10ms |
Thumb flexion speed | 111°/s |
Sensor Accuracy | ±5% |
Thumb Side Swing Velocity | 208°/s |
Body weight | 840g |
Four-finger bending speed | 208°/s |
sizes | 201.12*150*41.5mm |
Interface Definition

Communication interface: Support EtherCAT bus
Power interface: Support 12V-48V wide voltage input
FAQ
Q: Are you a trading company or a manufacturer?
A: We are both a manufacturer and a trading company. We have in-house production capabilities and international trade experience, providing high-quality products and reliable service.
Q: Can I place a sample order?
A: Absolutely. We welcome sample orders for testing and quality evaluation.
Q: What is your lead time?
A: Due to the complexity of the process, standard production takes 8–10 working days. For customized items, please contact us before placing an order to confirm the lead time.
Q: How do you ship the goods, and how long does delivery take?
A: We typically ship via express services such as DHL, UPS, FedEx, EMS, or TNT. Air and sea shipping are also available. Delivery via express usually takes 3–15 days, depending on the destination.
Q: What payment methods do you accept?
A: We accept T/T (bank transfer), PayPal, Western Union, and L/C (Letter of Credit).