













产品描述
智能仿生五指灵巧手采用16自由度高精度驱动系统,五指全关节主动控制,支持高灵活度多指协同操作。搭载高分辨率触觉传感器矩阵,实现对接触点压力、分布及表面形态的实时感知反馈。具备较强的负载能力和动态响应性能,适配多种控制接口与主流机器人平台,适用于复杂环境下的抓取、操作及人机交互控制研究。
产品优势:
高自由度:16自由度精密驱动系统,全面模拟人手的自然运动,支持多种复杂手势和灵活操作,适用于多指协调控制与精细作业需求。
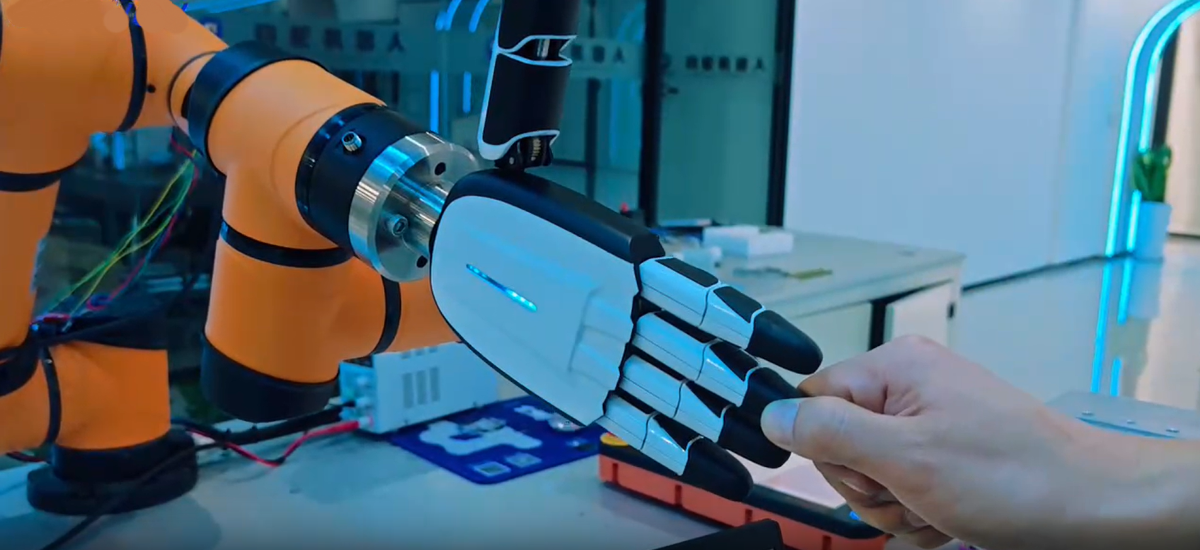
高分辨触觉传感器:配备高灵敏度、多点触觉传感器阵列,能够实时感知压力分布、接触位置与表面轮廓,提升对抓握物体的感知与控制能力。
强大的抓握力:优化的驱动与力学结构设计,兼顾力量与精度,可稳固抓取不同尺寸和形状的物体,满足多场景的负载需求。
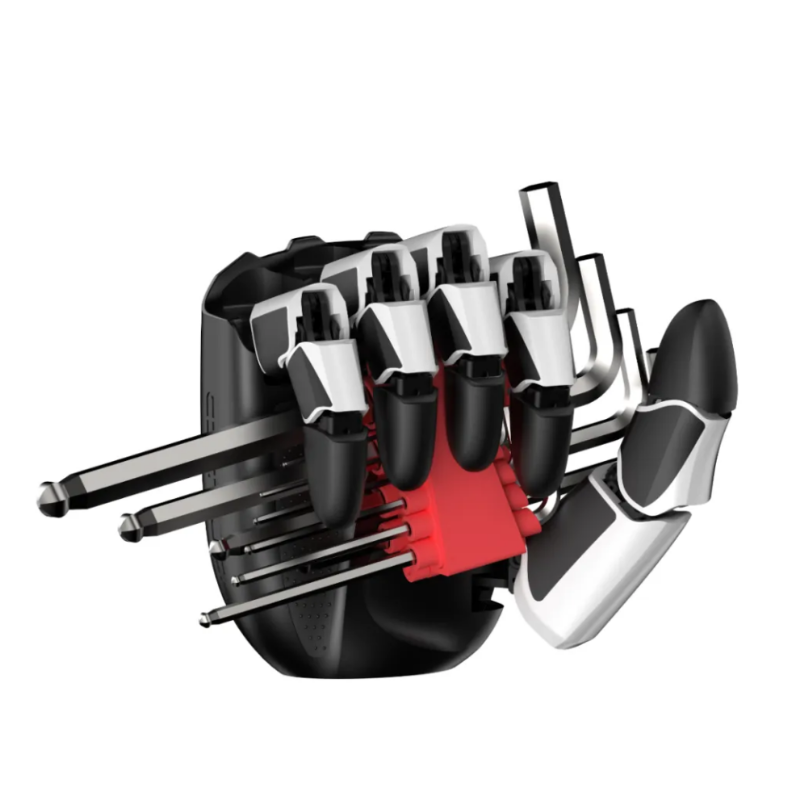
五指关节全躯:每根手指均采用多关节主动驱动,真实还原人手肌腱结构,实现全关节的灵活联动与拟人化运动表现。

这款智能仿生手融合了仿生学、机电一体化、
材料科学、生物医学与信息技术等多学科技术,
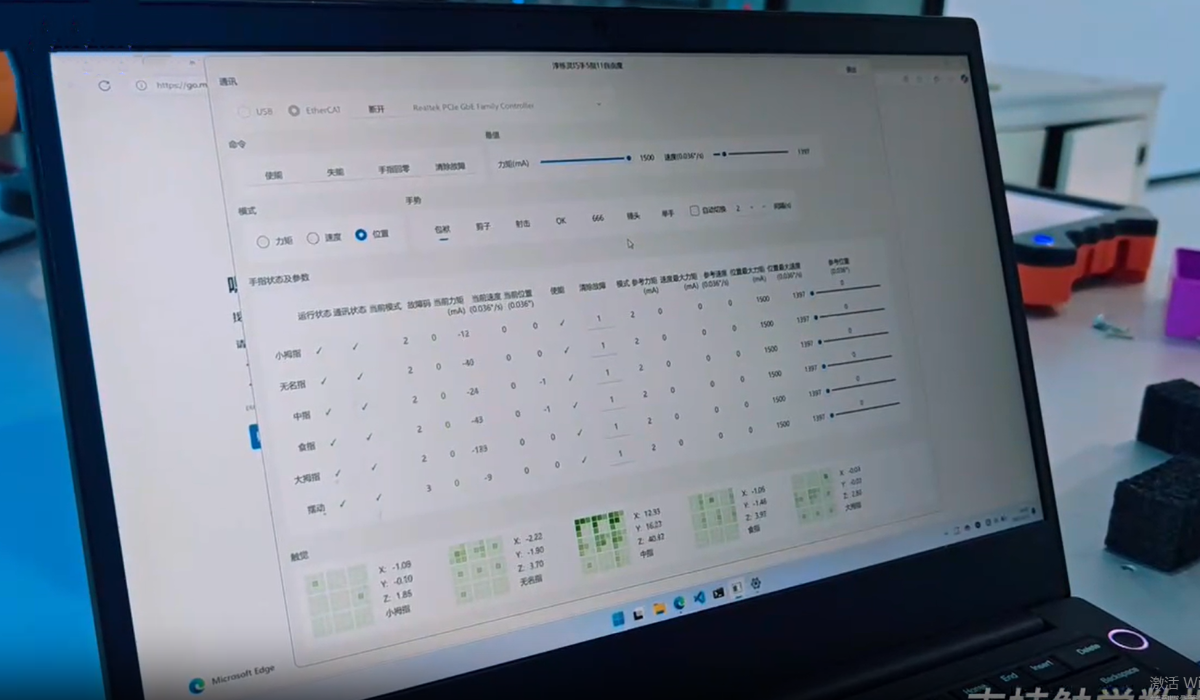
搭载自主研发的体感控制系统,
使其具备媲美人手的灵活性与操控能力。
内部集成6个独立执行单元,
支持每根手指独立运动,
其中拇指具备双向自由度,
进一步增强了复杂抓握与精细操作的能力。
功能特点

1. 高自由度
该仿生手具备16个自由度,支持食指侧摆功能,拇指具备大范围的对掌与反掌运动能力,可高度模拟人手的自然动作轨迹。通过多关节协同控制,可实现精细捏取、侧抓、环握等多种复杂抓取操作,适用于多种机器人操作场景中对灵活性要求极高的任务。

2. 高分辨率触觉传感器
每个手指均可集成一个高分辨率三维力触觉传感器,能够实时感知并反馈接触物体的法向力、切向力以及微小变化。该传感系统可有效提升手指在操作过程中的感知能力,使仿生手在抓握稳定性、物体识别和力控协同方面具备更强的智能反馈与适应能力。

3. 强大的抓握力
智能仿生手配备优化设计的传动结构与高性能微型驱动器,四指联合最大抓握力可达25N,拇指最大握力可达35N,足以稳定抓取中等重量及不规则形状物体。强大的力输出与精准的运动控制相结合,确保在高负载作业中依然保持良好操作性能与安全性。

4. 五指关节全躯
仿生手的每根手指均采用多关节结构设计,关节间通过精密齿轮与微型电机驱动系统连接,实现每一个关节的独立控制与自由运动。该结构使每根手指具备灵活的关节联动能力,提升整体运动协调性,模拟人手自然弯曲、张开及握持等多种动作,实现高度仿生的人机交互体验。
应用
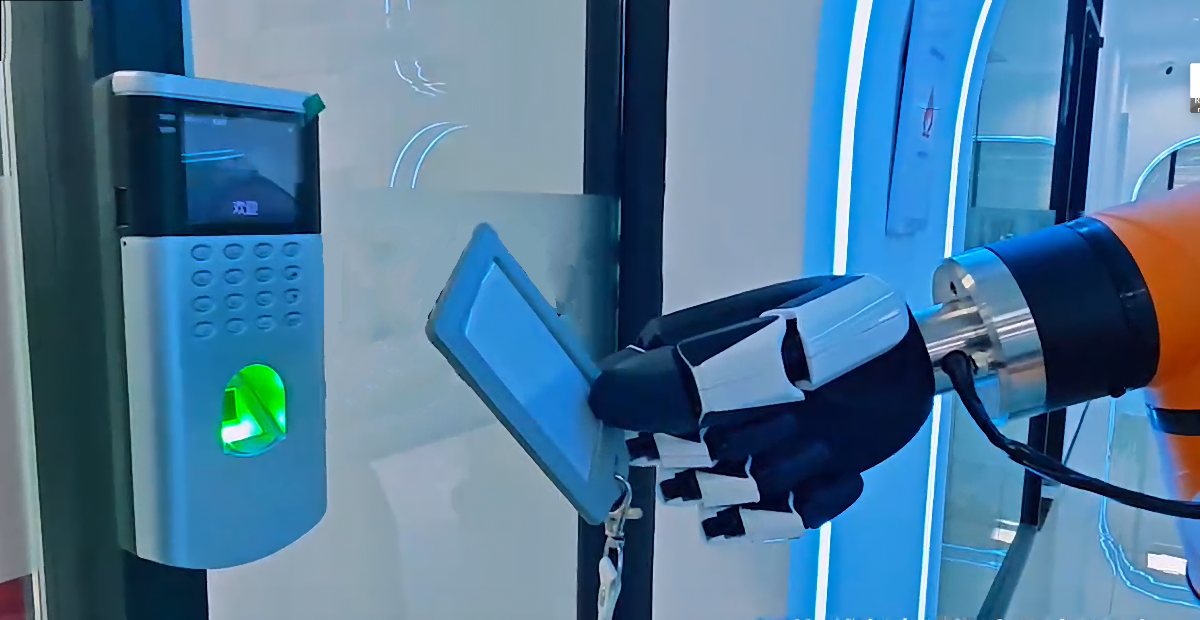
16自由度灵巧手,可应用在工业制造与自动化装配、医疗与康复、服务机器人与人机协作、危险环境作业、教育与科研、电商物流与分拣、农业与食品加工等领域:
全行程最快抓握节拍0.7S

可搭载机械臂/人形机器人执行复杂任务
支持触觉系统反馈
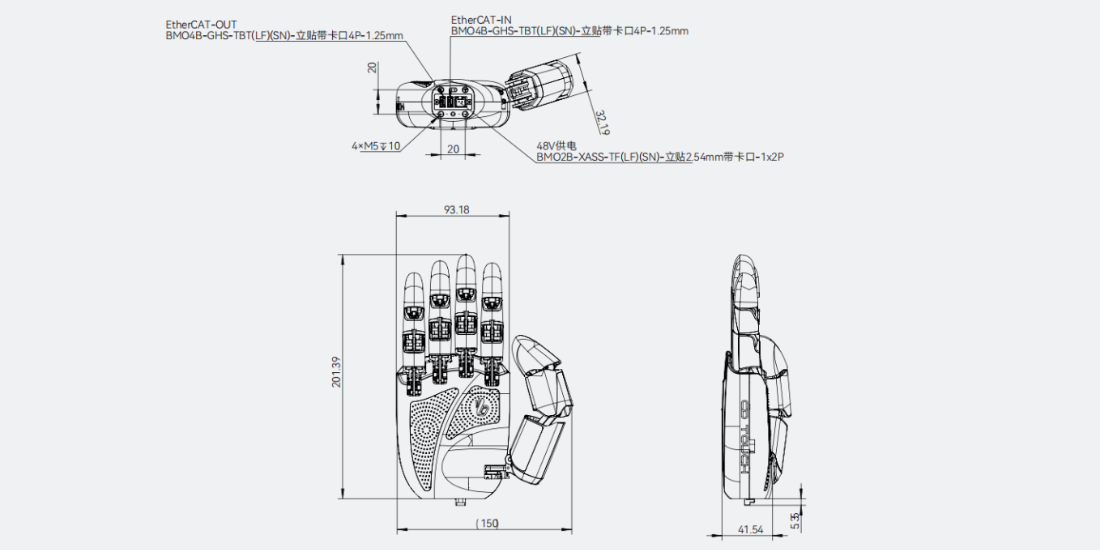
尺寸图
产品参数
型号 | CDH-MO-5-16-E0 |
自由度 | 16(6主动,10被动) |
工作电压 | DC12V-48V |
关节数 | 16 |
静态电流 | 0.23A(24V) |
拇指最大握力 | 35N |
最大电流 | 5A(24V) |
四指最大握力 | 25N |
通讯接口 | EtherCAT |
整手负载 | 15kg |
触觉系统 | 支持 |
拇指旋转范围 | ≤90° |
触发力 | ≥ 50g |
拇指弯曲角度 | ≤ 80° |
压力范围 | 50-2000g |
四指弯曲角度 | ≤90° |
响应时间 | ≤10ms |
拇指弯曲速度 | 111°/s |
传感器精度 | ±5% |
拇指侧摆速度 | 208°/s |
本体重量 | 840g |
四指弯曲速度 | 208°/s |
尺寸 | 201.12*150*41.5mm |
接口定义

通讯接口:支持EtherCAT总线
电源接口:支持12V-48V的宽电压输入
常见问题
Q:你们是贸易公司还是制造商?
A:我们同时是制造商和贸易公司,具备自主生产能力与国际贸易经验,能够为客户提供高质量产品和专业服务。
Q:我可以订购样品吗?
A:当然可以,我们欢迎样品订单,用于测试和验证产品质量。
Q:交货时间大概多久?
A:由于产品工艺复杂,标准生产周期为8-10个工作日。对于定制产品,请在下单前联系我们确认交期。
Q:你们通过什么方式发货?大概多久可以收到?
A:我们通常通过国际快递(如DHL、UPS、FedEx、EMS或TNT)发货,也支持空运或海运。快递通常3-15天内可送达,具体时间依据目的地而定。
Q:你们支持哪些付款方式?
A:我们支持多种付款方式,包括电汇(T/T)、Paypal、西联汇款(Western Union)和信用证(L/C)。