













产品描述

BL系列伺服驱动器
快速
智能
精准
自主研发 专业品质 严格把关 服务保障
功能特点
技术特点 | ||
◆控制模式:位置,速度,转矩; | ||
输入电压 | 110-240 AC | 单相,三相 |
输入频率 | 47-63Hz | / |
电气标准规格 | ||||
位置控制 | 指令控制方式 | 脉冲、±10V模拟量输入、CANopen、RS485 MODBUS RTU | ||
输入信号 | 脉冲指令 | 输入脉冲形态 | 包含“方向 + 脉冲”、“A、B 相正交脉冲”、“CW/CCW 脉冲” 三种指令形态。 | |
信号格式 | 集电极开路 | |||
最高脉冲频率 | 集电极开路:(最大 500Kpps) | |||
模拟指令 | 电压范围 | 输入电压范围±10V | ||
输入阻抗 | 差分输入阻抗=5KΩ | |||
速度控制 | 指令控制方式 | PWM、±10V模拟量、脉冲、CANopen、RS485 MODBUS RTU | ||
输入信号 | PWM | 极性 | PWM=0〜100%,极性=1/0 | |
无极性 | PWM=50%+/-50% | |||
频率范围 | 最小1kHz,最大100kHz | |||
最小脉冲宽度 | 220ns | |||
模拟指令 | 电压范围 | 输入电压范围±10V | ||
输入阻抗 | 差分输入阻抗=5KΩ | |||
电流控制 | 指令控制方式 | PWM、±10V模拟量、CANopen、RS485 MODBUS RTU | ||
输入信号 | PWM | 极性 | PWM=0〜100%,极性=1/0 | |
无极性 | PWM=50%+/-50% | |||
频率范围 | 最小1kHz,最大100kHz | |||
最小脉冲宽度 | 220ns | |||
模拟指令 | 电压范围 | 输入电压范围±10V | ||
输入阻抗 | 差分输入阻抗=5KΩ | |||
I/O | 数字输入IN | 端口数量 | 12(其中IN6、IN7、IN8、IN9、IN10为高速口,IN5内部用于 电机温度保护) | |
信号格式 | NPN(低电平有效) | |||
可设置功能 | 伺服使能,外部复位,正/反转限位, 电机运转停止, 高速脉冲输入等 | |||
数字输出OUT | 端口数量 | 3 | ||
信号格式 | NPN(低电平有效),可承受最大电流300mAdc,最高电压 30Vdc | |||
可设置功能 | 故障信号,抱闸控制,自定义事件轨迹状态 | |||
功能 | LED 指示 | 驱动器状态指示 ,通信指示 | ||
通信功能 | RS-232 | 波特率 | 9600-115200 | |
协议 | 全双工模式, ASCII或二进制格式 | |||
RS485 | 波特率 | 9600-115200 | ||
协议 | MODBUS RTU | |||
CAN | 波特率 | 20kbit/s-1Mbit/s | ||
协议 | Canopen应用层DS -301V4.02 | |||
设备 | DSP-402设备驱动和运动控制 | |||
保护功能 | 过压,过流,欠压,过载,过热,编码器异常,位置跟 踪误差太大等保护 | |||
使用环境 | 安装地点 | 无腐蚀气体,可燃性气体等 | ||
海拔高度 | 低于1000米 | |||
温度 | 0°C~+50°C | |||
湿度 | 5%~95%RH,无水珠凝结 | |||
耐振动/耐冲击强度 | 小于4.9m/s2/小于19.6m/s2 | |||
应用
伺服驱动器应用于各种伺服电机、无刷电机,机器人领城、新能源领城、自动化领域、AGV汽车行业,控制系统中,能将输入的电压信号转换为电机轴上的机械输出量,拖动被控制元件,从而达到控制目的。

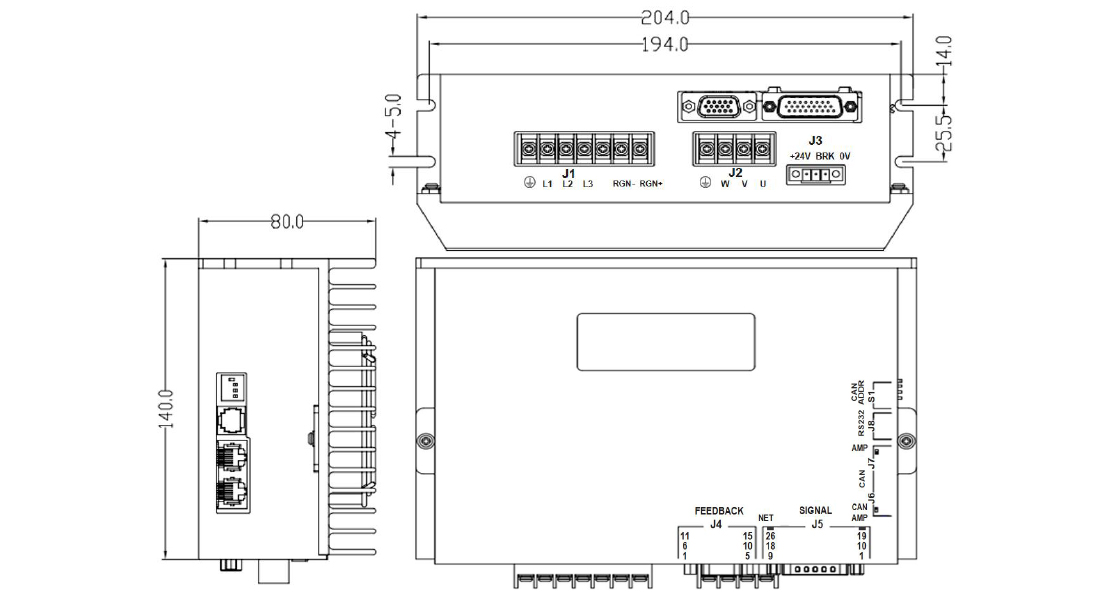
尺寸图
BL系列外形尺寸图:
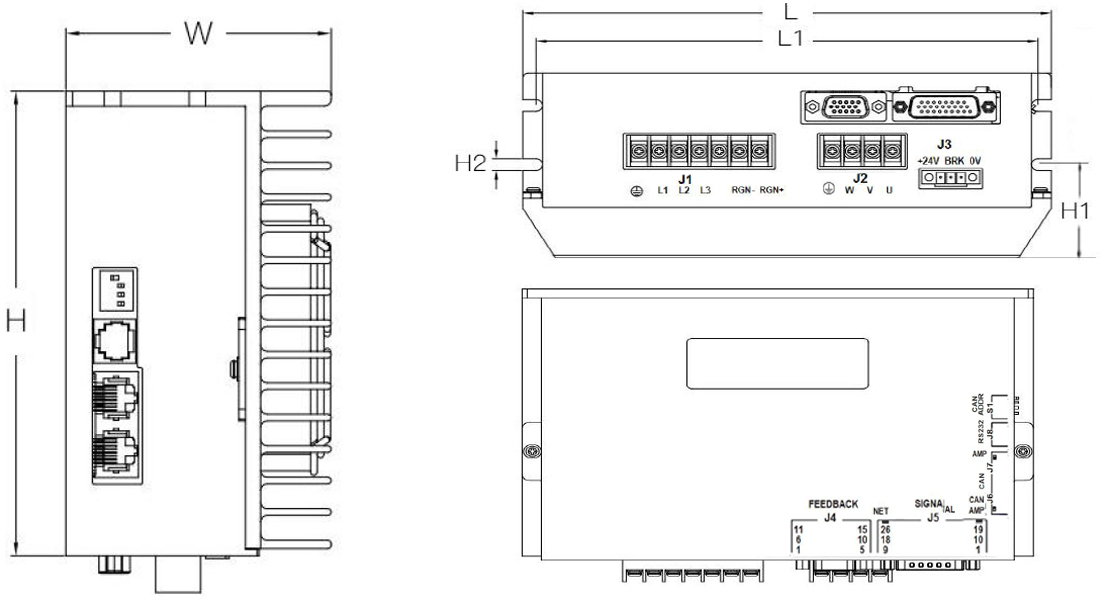
型号 | L | L1 | W | H | H1 | H2 |
BLPC/R-220B03-OPE/AB | 194 | 174 | 58.5 | 113.5 | 21 | 4-5.0 |
BLPC/R-220B07-OPE/AB | ||||||
BLPC/R-220B10-OPE/AB | 204 | 194 | 60 | 140 | 21 | 4-5.0 |
BLPC/R-220B14-OPE/AB | 204 | 194 | 80 | 140 | 40.5 | 4-5.0 |
BLPC/R-220B17-OPE/AB | ||||||
BLPC/R-220B25-OPE/AB | 285 | 275 | 188 | 114 | 20.5 | 4-5.0 |
BLPC/R-220B35-OPE/AB |
型号说明
BL | PC | -220B | 15 | -OP | E | B | GT | ||||||||||||||
系列 | |||||||||||||||||||||
BL/DH/LS/BH | 特殊要求 | ||||||||||||||||||||
GT:绿色端子款 | |||||||||||||||||||||
输入指令 | |||||||||||||||||||||
P:脉冲 A:模拟量 R:RS485 C:CANopen | 制动单元 | ||||||||||||||||||||
B:带制动单元 | |||||||||||||||||||||
供电电压 | |||||||||||||||||||||
220:220VAC 380:1380VAC B:三相 | 反馈 | ||||||||||||||||||||
E:增量式A/B正交 | |||||||||||||||||||||
A:绝对值(多摩川RS485) | |||||||||||||||||||||
额定电流 | |||||||||||||||||||||
03:3.5Arms 07:7Arms 10:10Arms | 特殊功能 | ||||||||||||||||||||
17:17Arms 25:25Arms 35:35Arms | OP:脉冲输出 | ||||||||||||||||||||
产品参数
驱动器规格汇总表 | ||||||
驱动器型号 | 供电电压 | 连续电流 | 峰值电流 | 反馈类型 | 外形尺寸 | 重量 |
BLPC/R-220B03-OPE/AB | 220VDC | 3.5A | 10.5A | 增量式或绝对值 | 194*113.5*58mm | 0.9kg |
BLPC/R-220B07-OPE/AB | 7A | 14A | ||||
BLPC/R-220B10-OPE/AB | 10A | 26.5A | 204*140*60mm | 1.2kg | ||
BLPC/R-220B14-OPE/AB | 14A | 42A | 204*140*80mm | 1.2kg | ||
BLPC/R-220B17-OPE/AB | 17A | 44A | ||||
BLPC/R-220B25-OPE/AB | 24.5A | 73.5A | 285*188*114mm | 3.8kg | ||
BLPC/R-220B35-OPE/AB | 35A | 84A | ||||
备注:1.驱动器供电电压必须大于或者等于电机额定电压;2.驱动器的额定电流必须大于或等于电机的额定电流 | ||||||
应用接线图
BL系列系统接线图:
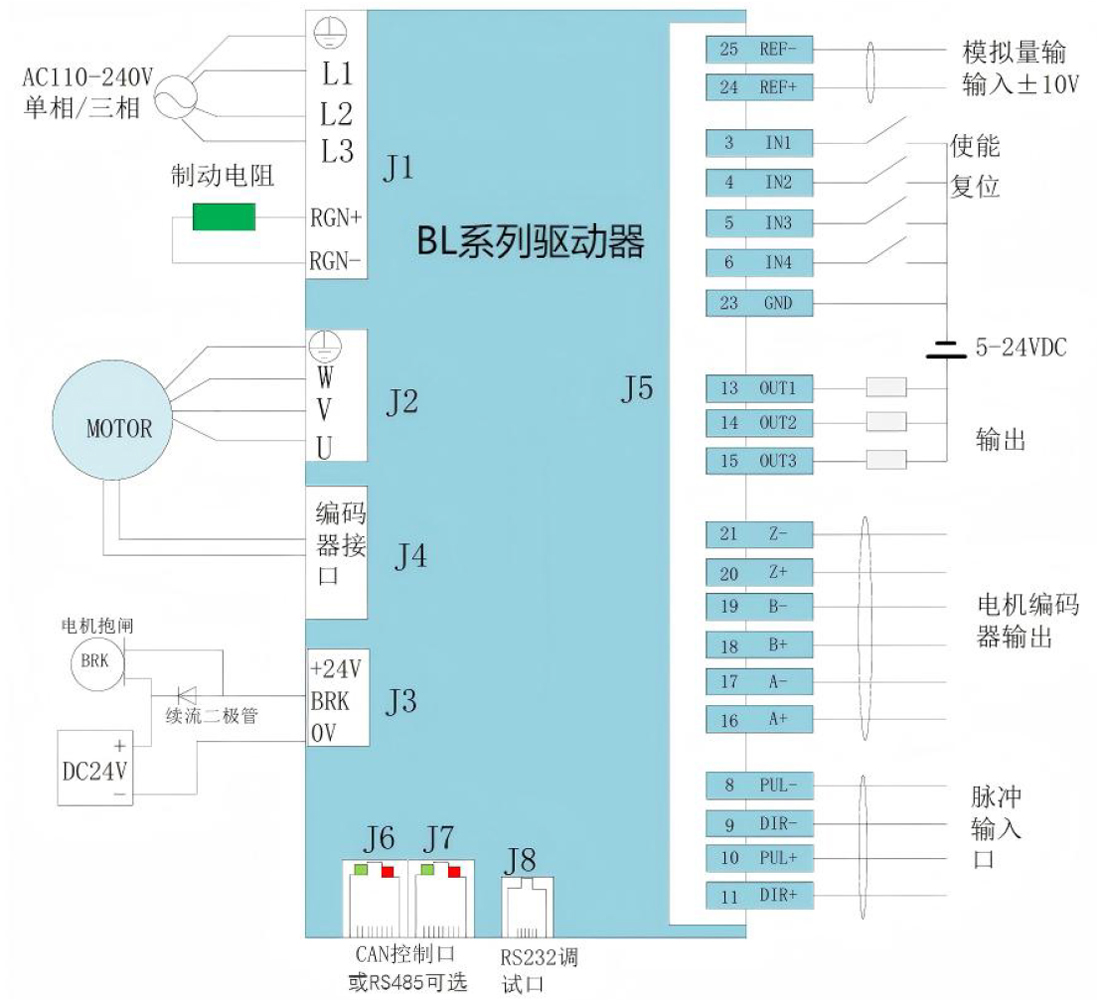
说明:
1. 输入端子IN1 , IN2 , IN3 , IN4 , IN5 , IN11 , IN12是普通端口可以接收NPN和PNP的信号, 最高输入电压24V
2. IN6, IN7, IN8, IN9, IN10是高速输入口 ,最高输入电压5V
BL系列端子定义
接线端口定义 | ||
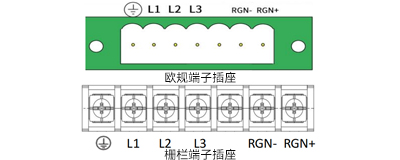
1、主电源三相输入端子J1 | ||
| L1 | AC220V |
L2 | ||
L3 | ||
 | 地 | |
RGN- | 制动电阻接口 | |
RGN+ | ||
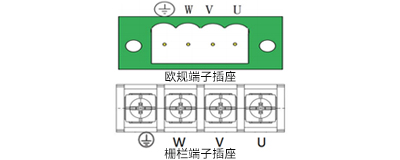
2、电机接口J2 | ||
| U | 电机线U |
V | 电机线V | |
W | 电机线W | |
| 电机线PE | |
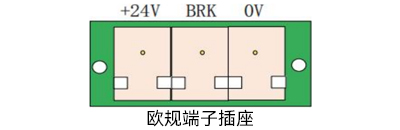
3、内部24v输出端子J3 | ||
| +24V | 24v输出200mA |
BRK | 接电机抱闸线 | |
0V | 0V | |
4、电机编码器输入端J4 | |||||
| |||||
引脚 | 定义 | 功能 | 引脚 | 定义 | 功能 |
1 | A+ | 电机编码器A+输入 | 9 | V+ | 电机编码器V+输入 |
2 | A- | 电机编码器A-输入 | 10 | COS* | NTC1/温度开关1 |
3 | B+(DAT+) | 电机编码器B+输入 | 11 | W+ | 电机编码器W+输入 |
4 | B-(DAT-) | 电机编码器B输入 | 12 | IN5* | 温度开关2 |
5 | Z+ | 电机编码器Z+输入 | 13 | +5V | 电机信号线+5V |
6 | Z- | 电机编码器Z-输入 | 14 | 0V | 电机信号线GND |
7 | U+ | 电机编码器U+输入 | 15 | NTC* | NTC2 |
8 | / | / | / | / | / |
备注:1. *需要NTC电阻温度传感器输入功能的 ,接10脚位和15脚位 ,下单请注明; | |||||

5、控制信号I/O端子J5 | |||||
| |||||
引脚 | 名称 | 功能 | 引脚 | 名称 | 功能 |
1 | FG | 大地 | 14 | OUT2 | 自定义 |
2 | IN5 | 电机温度检测 | 15 | OUT3 | 自定义 |
3 | IN1 | 使能 | 16 | EONA+ | 电机编码器输出信号A+ |
4 | IN2 | 自定义 | 17 | EONA- | 电机编码器输出信号A- |
5 | IN3 | 自定义 | 18 | EONB+ | 电机编码器输出信号B+ |
6 | IN4 | 自定义 | 19 | EONB- | 电机编码器输出信号B- |
7 | IN6 | 自定义 | 20 | EONZ+ | 电机编码器输出信号Z+ |
8 | IN7 | 自定义 | 21 | EONZ- | 电机编码器输出信号Z- |
9 | IN8 | 自定义 | 22 | +5V | 5V电源输出(400mA) |
10 | IN9 | 自定义 | 23 | GND | 电源地 |
11 | IN10 | 自定义 | 24 | Ref+ | 模拟量正输入 |
12 | IN11 | 自定义 | 25 | Ref- | 模拟量负输入 |
13 | OUT1 | 自定义 | 26 | IN12 | 自定义 |

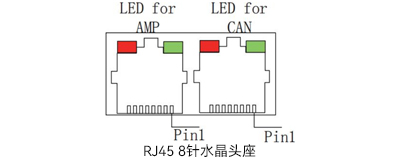
6、CAN(RS485)通信端子 J6 & J7 | |||
本驱动器通信端口有两种,定义如下: | |||
| 引脚 | 定义 | 名称 |
1 | CANH( RS485_A) | CANH 信号(RS485_A) | |
2 | CANL(RS485_B) | CANL 信号(RS485_B) | |
3/7 | GND | 通讯电源地 | |
注:J6,J7 中两个RJ45端口定义相同,方便通信时桥接。 | |||
| ||
6P接线端子定义如下 | ||
引脚 | 定义 | 名称 |
1 | CANH(RS485_A) | CANH 信号(RS485_A) |
2 | CANH(RS485_A) | CANH 信号(RS485_A) |
3 | C_GND | 通讯电源地 |
4 | C_GND | 通讯电源地 |
5 | CANL(RS485_B) | CANL 信号(RS485_B) |
6 | CANL(RS485_B) | CANL 信号(RS485_B) |

7、驱动器状态指示灯(AMP) | |
红/绿双色LED灯通过颜色的变化、是否闪烁,来告诉我们驱动器的状态。可能的情况有: | |
绿色/不闪 | 驱动器OK并使能 |
绿色/慢闪 | 驱动器 OK 但没有使能,使能后即可运行 |
绿色/快闪 | 正限位或负限位开关有效,电机只会向没有被限位开关禁止的方向运动 |
红色/固定 | 瞬时故障,故障排除后放大器需要重启操作 |
红色/闪烁 | 锁住故障,重启放大器即可恢复操作 |
8、串行通信端子J8 | |||
| 引脚 | 定义 | 名称 |
2 | RXD | RS232 通讯接收端 | |
3 | GND | 通讯电源地 | |
5 | TXD | RS232 通讯发送端 | |

9、SW 驱动器CAN地址拨码开关 | |
当软件上设置选择是用外部拨码开关时,本开关拨码有效。开关编码按照BCD码顺序,拨码拨到ON时有效 | |
| |
SW拨码开关对应站号 | |
SW开关序号 | 对应站号 |
1 | 1 |
2 | 2 |
3 | 4 |
4 | 8 |
例如要设置站号为3,就是SW开关的1,2拨到ON其他为off,1+2=3;如果要设置站号是12, SW开的3,4拨到ON ,其他为ooff,4+8=12 | |

服务
全心服务,一路相伴
质保无忧,超期惠修,常回访促优化,安心之选,尽在掌握。

在线客服 高效物流 按时交付 品质保障 技术维护 厂家支持
售后保障
售后服务:我们提供全面的售后技术支持,若您在使用过程中遇到任何问题,专业的售后工程师团队将迅速响应,通过电话、邮件或远程协助等方式,为您提供详细的解决方案。我们还提供产品的定期回访,了解产品的使用情况,收集您的反馈意见,以便持续优化我们的产品和服务。此外,严格按照质保政策,对在质保期内出现质量问题的产品,提供免费维修或更换服务,让您无后顾之忧。