








 T1
4 Years
T1
4 Years





Precision spray robot
Intelligent control remote control automatic spray robot agricultural garden sprayer antivirus sprayer
- Medicine box volume:120L
- Spray flow:7-15L/min
- Spray distance:1.5m
- Control method:Remote control/automatic
- Total power:840W
- Boom length:3000mm
USD: Price Inquiry
ablity:Monthly Output200
- Product Description
- Product Params
Product Description
Precision spray robot

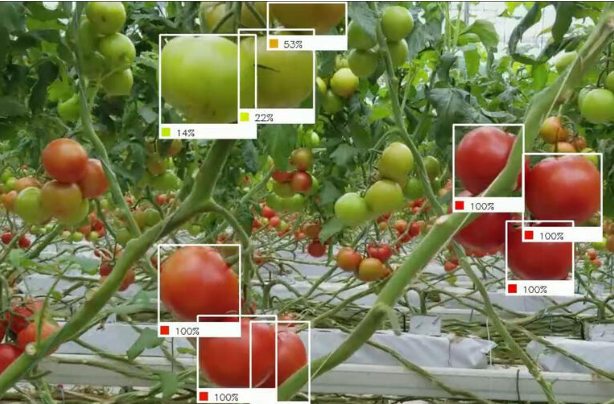
The precision spray robot consists of a chassis system, a vision system, a variable spray system, and a navigation system. While the car is moving, the dual 3D cameras dynamically acquire RGBD picture information of the trees to be sprayed on both sides, and use deep learning algorithms to identify the density and distance of the spraying objects. Based on the recognition results and vehicle speed, the switching flow rate of the nozzles is calculated and the spraying parabola angle of each nozzle is calculated. , and controls the motor to adjust its attitude in real time, and finally achieves accurate target spraying based on prediction of the car's operation process.
Parameters of crawler precision spray robot
—— -
| RPWLD-120 | Medicine box volume | 120L |
| Spray flow | 7-15L/min | |
| Spray distance | 1.5m | |
| Control method | Remote control/automatic | |
| Total power | 840W | |
| Boom length | 3000mm | |
| Spray boom height adjustable | 300mm | |
| Spray uniformity | 90% | |
| Maximum walking speed | 1.2m/s | |
| Minimum turning radius | 0 | |
| Gear shifting method | Infinitely variable speed | |
| Working life | 3h | |
| Anti-collision function | Ultrasound | |
| Operating Voltage | 48V | |
| Battery category | Lithium battery |
Product Features
—— -
· Precision spray system
Deep learning and 3D algorithm technology identify the density and distance of spraying objects, realize the positioning and identification of work objects, calculate the switching flow rate of the nozzles based on the recognition results and vehicle speed, easily calculate the spraying parabola angle of each nozzle, and control the motor Adjust posture in real time to achieve precise spray tasks while the robot is driving.
· Intelligent environmental perception and autonomous obstacle avoidance
Through continuous scanning, the circumferential 360° radar can detect the operating environment and obstacle information in advance, and timely adjust the walking strategy according to the environment to achieve autonomous obstacle avoidance.
· Multi-terrain operations and navigation
In view of the diversity of agricultural terrain and materials, a variety of crawler, wheeled or track walking systems and driving methods are provided to meet the requirements of different scenarios.
Application scenarios
—— -
Venue type
Fruit and vegetable picking scene in orchard | Types of fruits and vegetables
Single-fruit tomatoes, bunch tomatoes, grapes, cucumbers, strawberries, oranges, kiwis, etc. |
 |  |
*This model is customized, the parameters are for reference only, please contact the merchant for details.
Recommended products

Mobile Grasping Composite Robot
The integrated design of collaborative robot and camera light source + mobile chassis constitutes a composite robot
collect:0

Crawler traveling chassis TSRDP-5
Crawler chassis modular design crawler chassis robot platform
collect:0
Inspection robot
Agricultural inspection robot autonomous navigation satellite positioning intelligent agricultural robot
collect:0