
















24小时在线客服

上海司南导航技术股份有限公司
 品牌官方供应商
12 年
品牌官方供应商
12 年
公司介绍

公司概述
司南导航集中国高精度GNSS技术之大成,拥有一支多年专业从事高精度GNSS核心技术的本土研发团队,主要技术骨干40余人次获得省部级科技奖项。在行业领军人物王永泉博士的带领下,司南导航打破了国外多项技术壁垒,突破了高精度GNSS核心算法、芯片、板卡、接收机、应用及产业化等关键技术瓶颈,研制出多款成熟的高精度多模多频GNSS板卡及接收机,数次填补了国内外GNSS在高精度领域的空白,同时也是国内首家真正实现北斗产业化应用的卫星导航企业。
司南导航紧跟全球四大卫星导航系统兼容互用趋势,灵活满足不同行业用户的差异化需求,业务涵盖了传统测绘、地理信息、智能交通、精细农业、机械控制、安全工程、工业测量等高精度应用领域,销售网络覆盖了全球二十多个国家与地区。
由司南导航投资建设的司南北斗产业园总建筑面积约26000平方米,计划2015年正式投入使用,作为我国主要的北斗高精度GNSS板卡研发、生产和应用中心,将成为带动上海、辐射全国、影响世界的北斗产业化基地。




公司证书

公司案例

机械控制
案例:
在汽车生产线上,用于汽车车身焊接的机械臂需要高精度地完成复杂的焊接任务。例如在某知名汽车品牌的生产车间,机械臂承担了将车身零部件精确焊接在一起的工作,每天要完成数百次的焊接操作,且对焊接点的位置精度和焊接质量要求极高。
工作方式:
机械臂配备了基于激光雷达和关节编码器的导航模块。激光雷达对工作区域进行实时扫描,构建出高精度的三维地图,精确识别车身零部件的位置和姿态。关节编码器则精确测量机械臂每个关节的转动角度和位移,反馈给控制系统。当接收到焊接任务指令时,控制系统根据激光雷达和关节编码器的数据,通过运动学算法计算出机械臂各关节的运动轨迹,引导机械臂末端的焊接工具精准地到达焊接点,按照预设的焊接参数和路径进行焊接操作,确保每个焊接点的质量稳定可靠,误差控制在毫米级别以内,从而保证汽车车身的整体结构强度和安全性。
智能机器人(以履带底盘为例)
案例:
在矿山开采场景中,有一款用于矿石运输的智能机器人采用履带底盘设计,能够在复杂崎岖的矿山道路上自主行驶,将开采出来的矿石从采矿区运输到指定的堆放地点。例如在某大型露天铁矿,这种智能机器人有效提高了矿石运输效率,降低了人力成本和运输风险。
工作方式:
该智能机器人的履带底盘上安装了惯性导航系统(INS)、全球定位系统(GPS)以及视觉传感器等多种导航设备。惯性导航系统利用陀螺仪和加速度计实时监测机器人的姿态和加速度变化,推算出自身的位置和行驶方向;GPS 提供机器人在全球坐标系下的大致位置信息,用于修正惯性导航系统的累积误差;视觉传感器则对周围环境进行图像采集和分析,识别道路边界、障碍物和目标堆放区域等特征。在行驶过程中,机器人的控制系统根据这些导航模块提供的数据,采用先进的路径规划算法,如 A * 算法或 Dijkstra 算法,规划出一条从当前位置到目标位置的最优行驶路径。同时,通过实时调整履带的速度和转向角度,使机器人能够沿着规划路径稳定行驶,自动避开障碍物,顺利完成矿石运输任务,即使在矿山环境中的沙尘、颠簸等恶劣条件下,也能保持较高的定位精度和行驶稳定性,定位误差通常在数米以内,满足矿山作业的实际需求。

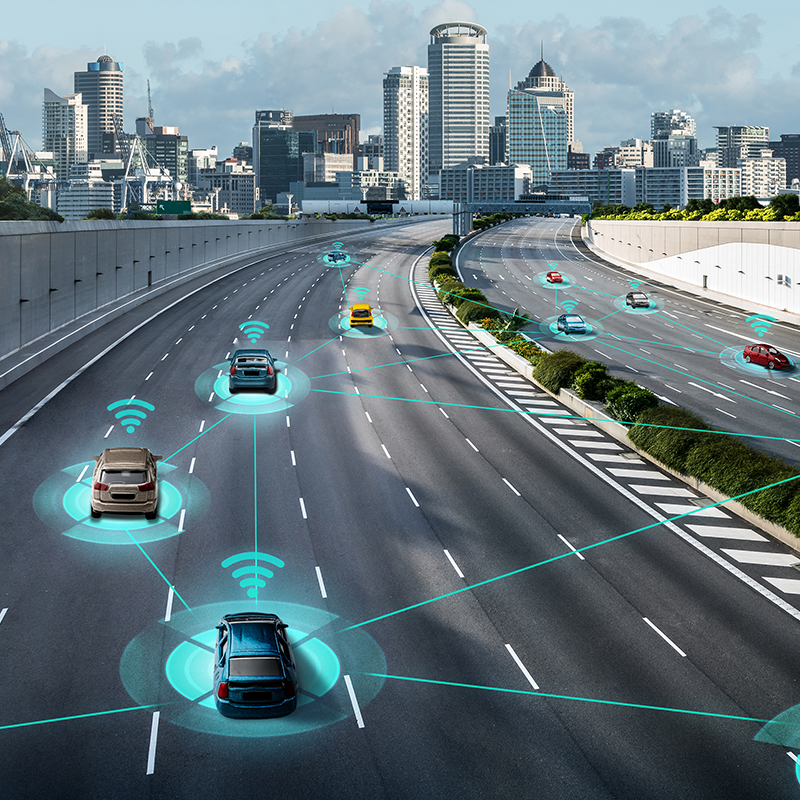
智能驾驶(汽车无人驾驶)
案例:无人驾驶汽车在城市道路上进行测试和运营,为居民提供出行服务,行驶里程增加且安全性提升,能应对复杂城市交通场景。
工作方式:车配激光雷达、毫米波雷达、摄像头、GPS 和高精度地图等设备。激光雷达建三维点云图测物体信息;毫米波雷达监测速度距离;摄像头用深度学习算法识别交通元素;GPS 定位,高精度地图提供道路详情。行驶中,控制系统融合传感器数据感知环境状态,用决策算法(规则或机器学习),经 ECU 控制动力、转向、制动系统,实现自动驾驶,如遇红灯能提前减速停车,路口转弯精准控制,行驶合规,提升出行体验与技术发展应用。

无人机
案例:大疆的农业植保无人机在农田作业中充分展示了导航模块的重要性。
工作方式:这些无人机采用 GPS 导航和视觉导航相结合的方式。在作业前,操作人员通过地面控制站在地图上规划好农田的作业区域和飞行路径,无人机起飞后,导航模块根据卫星定位信息引导无人机按照预定航线飞行。同时,视觉导航系统利用摄像头拍摄地面图像,对农田中的作物行进行识别和定位,进一步修正飞行路径,确保无人机在飞行过程中的稳定性和准确性,使农药或肥料能够均匀、精准地喷洒在农作物上,提高农业生产效率,降低劳动强度和成本,并且减少了农药的浪费和对环境的污染。


我们的服务


专业技术支持

诚信 合作 共赢
合作伙伴










联系我们
service23@ttbridge.com
上海市嘉定区澄浏中路618号