

产品描述
产品参数
| 减速比 | 30 | 50 | 80 |
| 2000r/min时输入额定扭矩 | 0.25Nm | 0.4Nm | 0.52Nm |
| 启动和停止时允许峰值扭矩 | 0.5Nm | 0.9Nm | 1.35Nm |
| 平均负载的最大允许扭矩 | 0.38Nm | 0.53Nm | 0.84Nm |
| 瞬时最大允许扭矩 | 0.9Nm | 1.8Nm | 2.5Nm |
| 齿隙 | ≤20Arcsec | ≤20Arcsec | ≤10Arcsec |
| 允许最大输入转速 | 10000rpm | ||
| 允许平均输入转速 | 6500rpm | ||
技术创新
超微型交叉滚子轴承
微型交叉滚子轴承的生产与常规机型不同,我们设计的嵌入式分离式沟槽结构,完美避开了市场上超小型滚道磨床的缺失,通过结构设计,从技术层面解决了滚道磨床超小型加工的难题。
超微型柔性轴承
微型柔性轴承的制造工艺不能遵循常规轴承加工工艺的分道加工工艺,以减少由于外径小、厚度薄而产生的多次装夹尺寸链误差和变形问题,而是需要采用一次出成品的复合加工方式。我们联合国内知名轴承研究院技术团队,在小型精密复合加工中心的基础上增加了滚道磨削和激光热处理功能,实现了从车削-热处理-磨削超精密滚道的一次性完成,高效解决了超微型柔性轴承的制造难题。
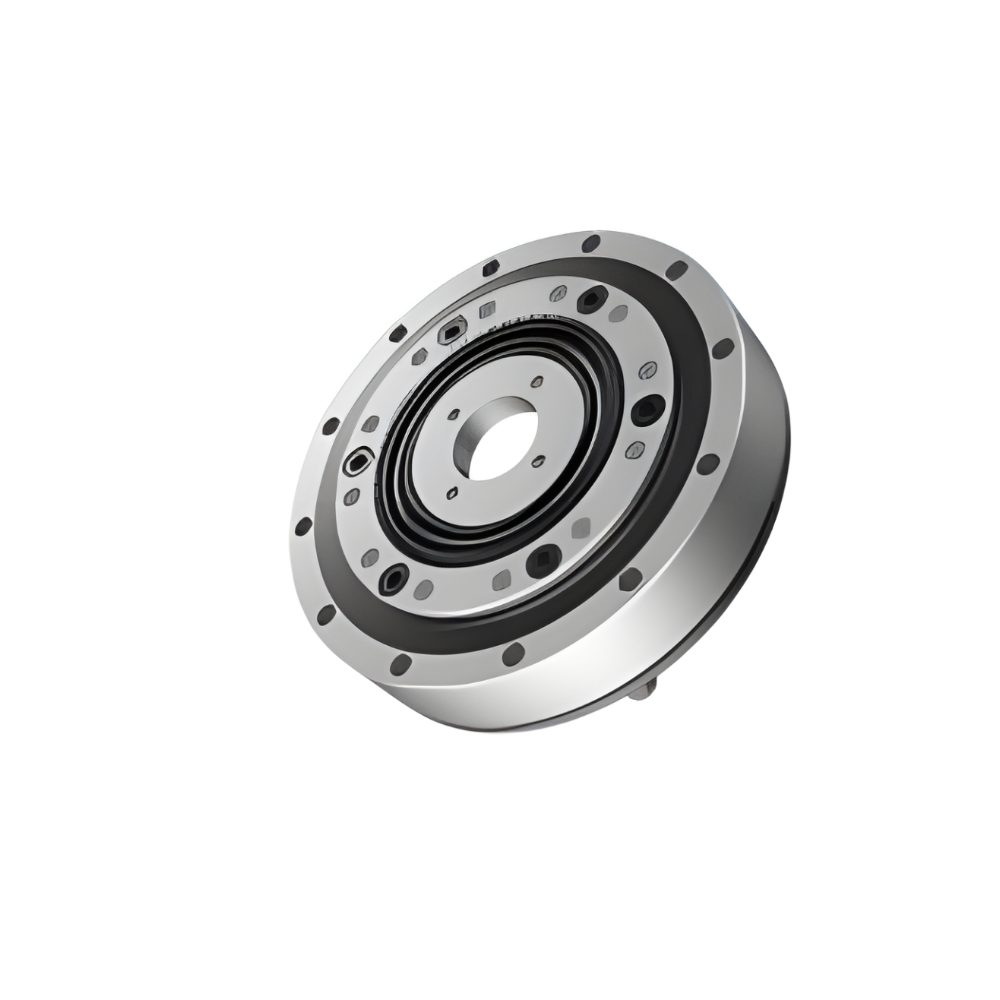
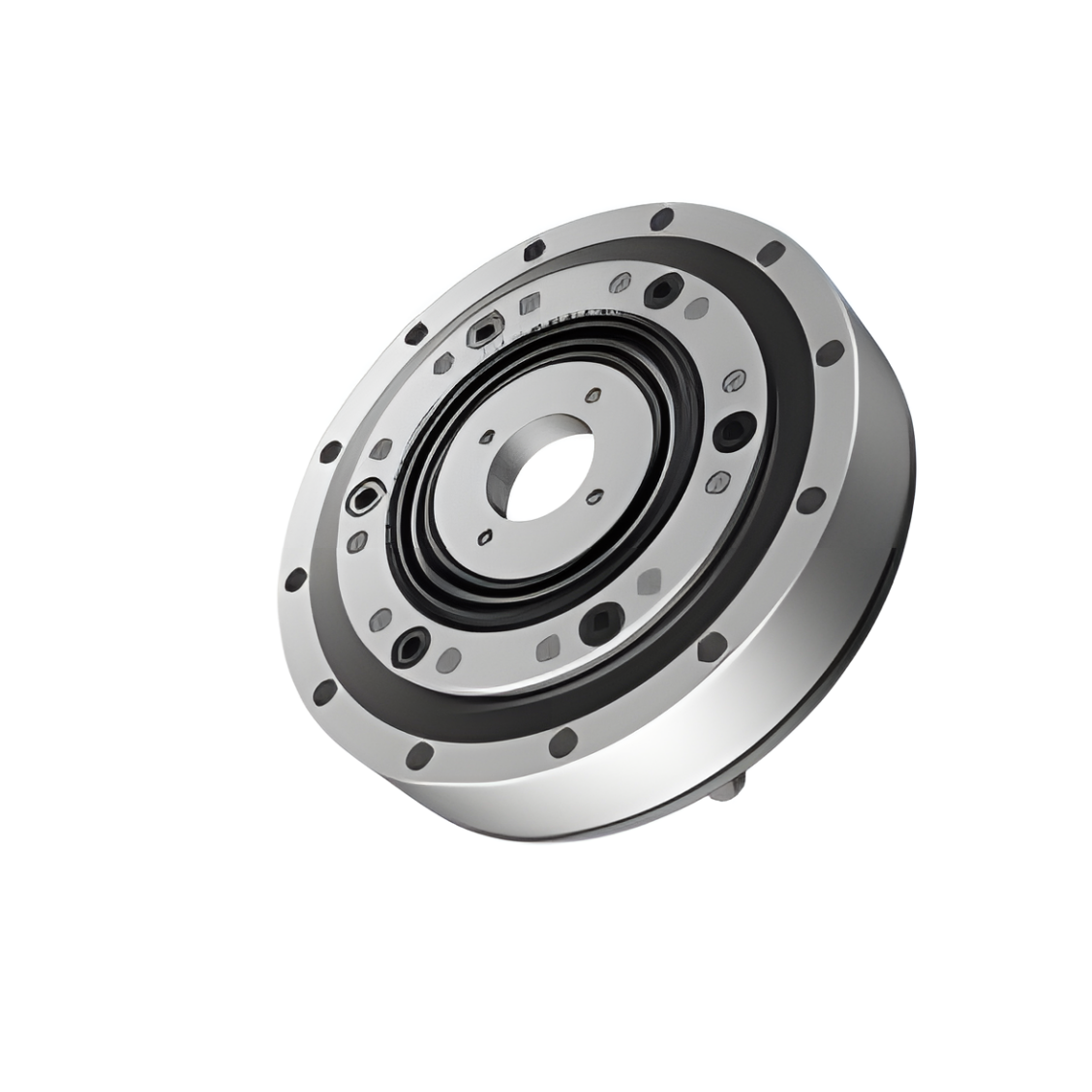
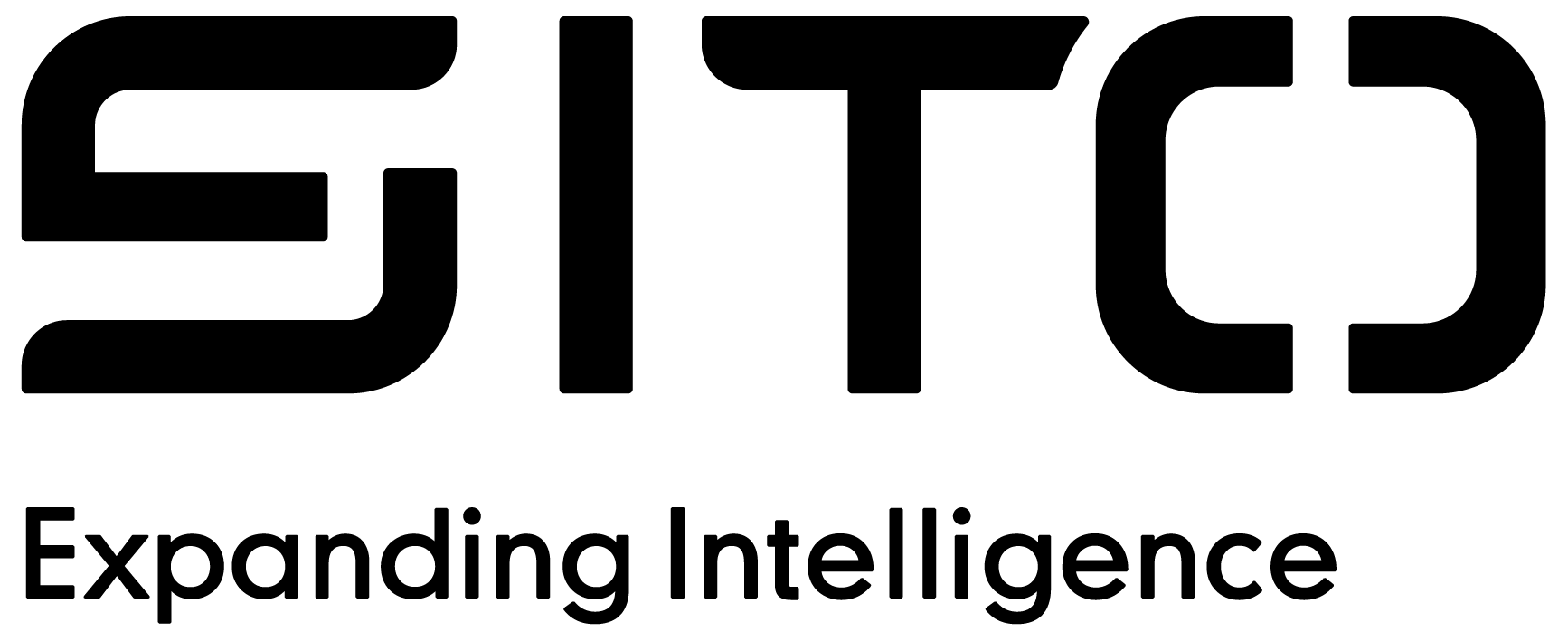
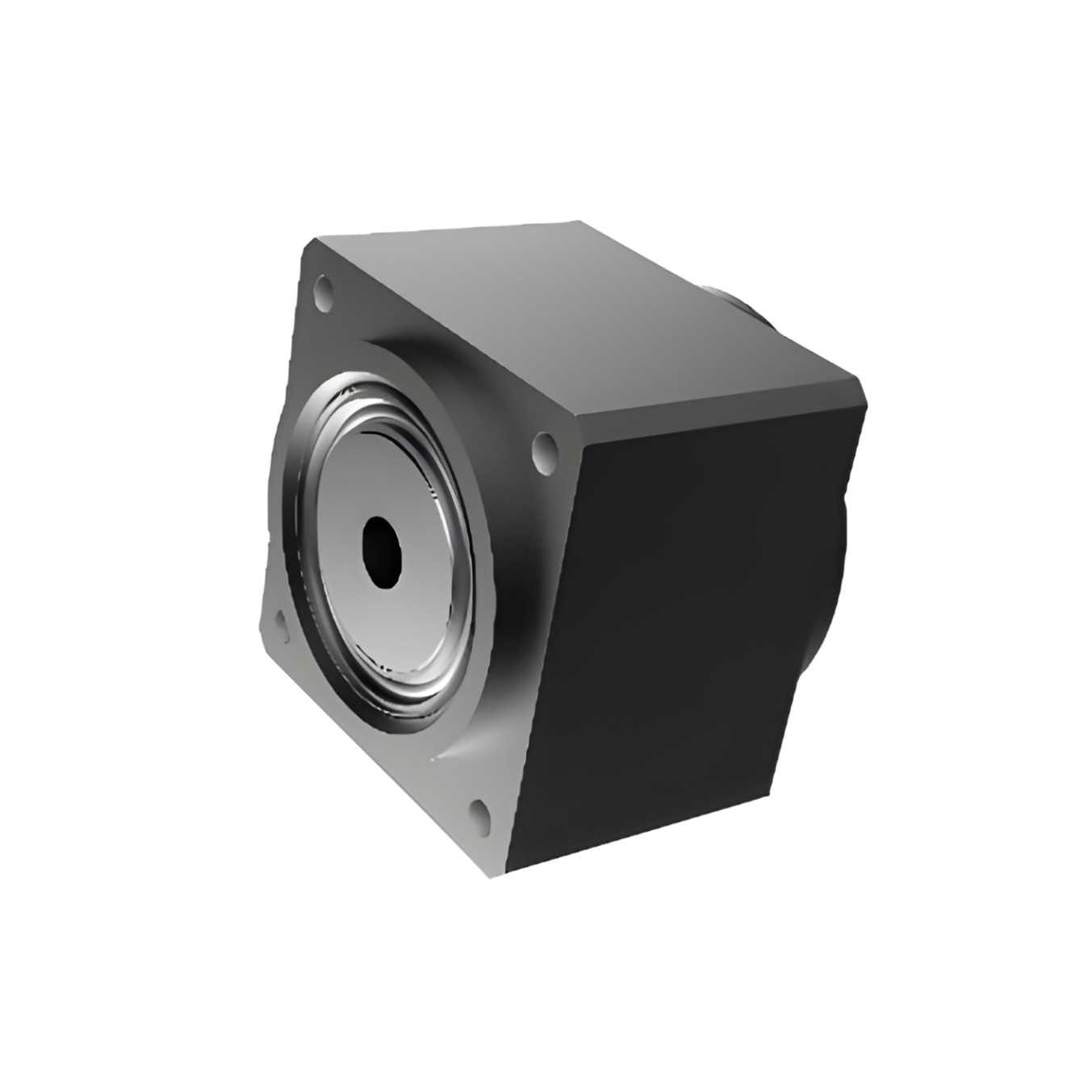
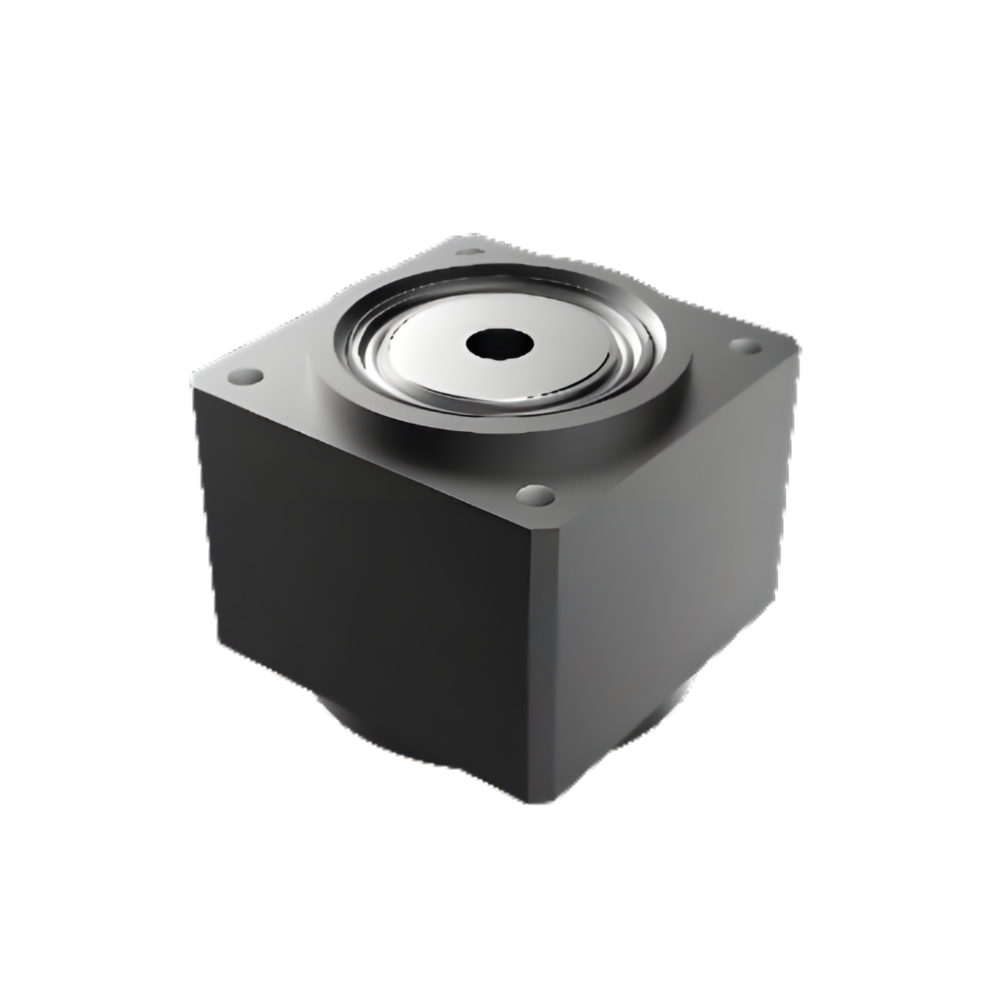
产品展示

谐波传动作为一种极为精妙的传动机制,通过波动变形达成运动传递与转换的过程,实现了运动传递和运动转换。当波发生器被引入并作用于柔轮时,柔轮便会依据波发生器的特定形状与运动规律,产生与之相应的连续波动变形,而实现诸如将高速旋转运动转换为低速大扭矩运动,或者将直线运动转换为特定曲线运动等复杂多样的运动转换需求。

随着科技的持续迅猛发展,谐波传动技术也在不断地迭代演进。新型材料的研发与应用为柔轮等部件带来了更为卓越的力学性能与耐用性,使其能够在更为严苛的工况条件下稳定运行。同时,先进的制造工艺如精密数控加工、特种成型技术等的引入,使得谐波传动装置的制造精度与生产效率得到了质的飞跃,进一步降低了生产成本并提升了产品的市场竞争力
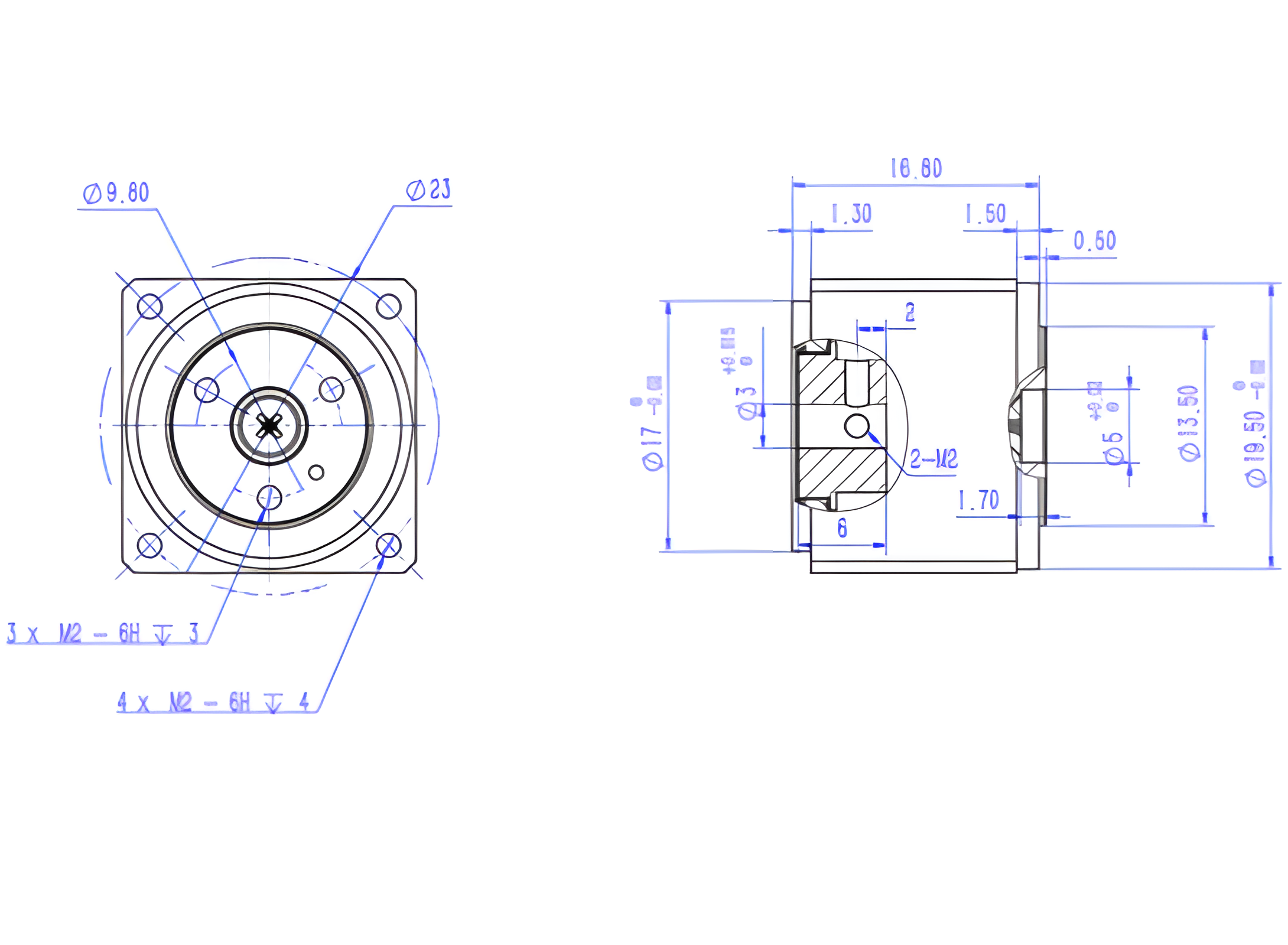
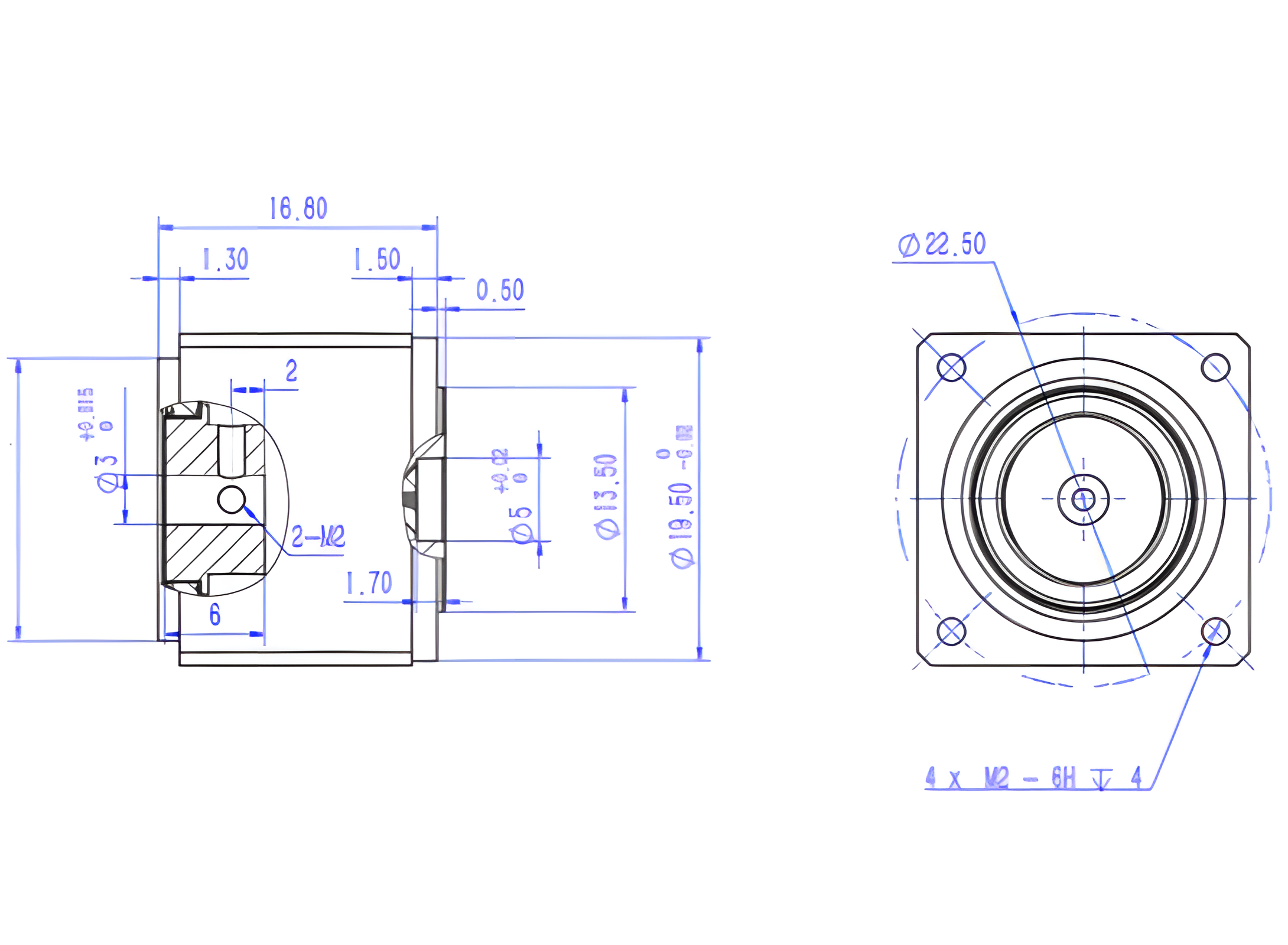
尺寸和接口
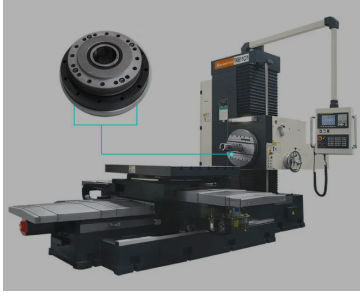
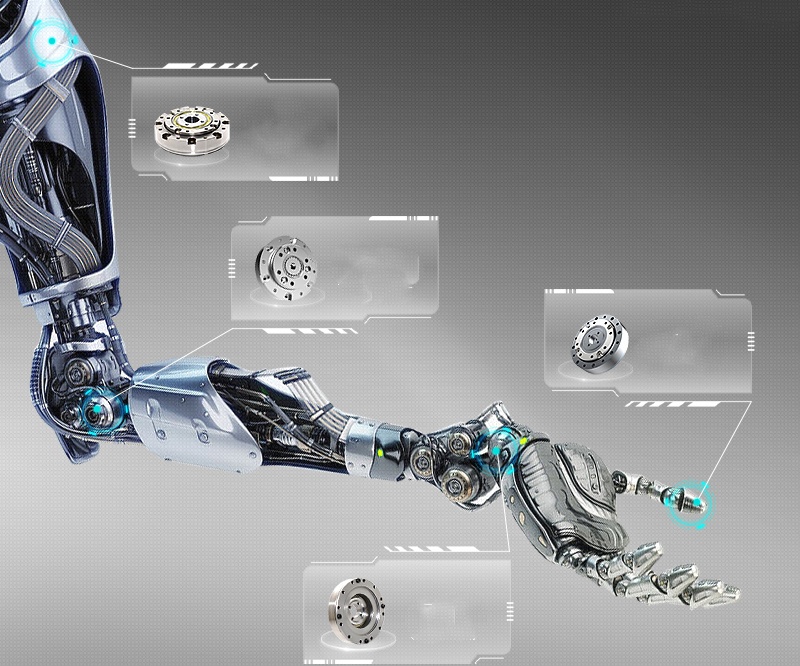
应用案例
谐波减速器体积小、重量轻,可以安装在机械手狭小的空间内,为手部关节提供精确的动力传输和运动控制,让机械手实现灵活的运动。此外,谐波减速器的低振动、低噪音特性也有助于降低手部关节运动时的振动和噪音,提高机器人的运行稳定性和静音性。仿人机器人肢体需要完成各种复杂、精细的动作,如抓取物体、行走、攀爬等,谐波减速器传动精度高,可以保证机器人肢体关节准确到达预定位置,实现高精度的运动控制。