














产品描述
这种实心关节电机结合了直流扭矩电机,驱动器,编码器和高精度谐波减速器。M系列关节执行器使自动化生产更容易、更高效。可广泛应用于数控机床、自动化生产线、机器人手臂、仿人机器人、大型旋转平台。该产品性能稳定,售后问题少,是机器人客户的首选产品。



产品参数
| 参数 | M4210E11B50L | |
| 总体参数 | 电机额定电压 | 24~36VDC |
| 电机额定电流 | 1.5A | |
| 减速后输出扭矩 | 3.2NM | |
| 重量 | 0.4KG | |
| 减速后的速度范围 | 0~40RPM | |
| 减速机参数 | 减速比 | 50 |
| 额定扭矩 | 3.2NM | |
| 启停峰值扭矩 | 7.8NM | |
| 背隙 | <10 arc seconds | |
| 使用寿命 | 8500hour | |
| 电机参数 | 转矩 | 0.3NM |
| 额定转速 | 2000RPM | |
| 最大转速 | 2500RPM | |
| 功率 | 33W | |
| 电阻 | 2.65 | |
| 电感 | 1.18mh | |
| 转动惯量 | 9.139x10-5 KG/M 2 | |
| 反馈信号 | 多圈绝对编码器(15位单圈和16位多圈) | |
| 冷却方式 | 自然冷却 | |
| 位置控制方式 | 最大输入脉冲频率 | 500千赫 |
| 脉冲指令方式 | 脉冲+方向,A相+B相(需要控制器支持AB脉冲) | |
| 电子传动比 | 设置“1~65535”为“1~65535” | |
| 位置采样频率 | 2千赫 | |
| 保护功能 | 锁电机报警,过流报警 | |
| 通信接口 | Canopen (CAN通信)/Modbus(485通信) | |
| 环境 | 环境温度 | 0 ~ 40° |
| 电机允许最高温度 | 85° | |
| 湿度 | 5 ~ 95% | |
产品展示
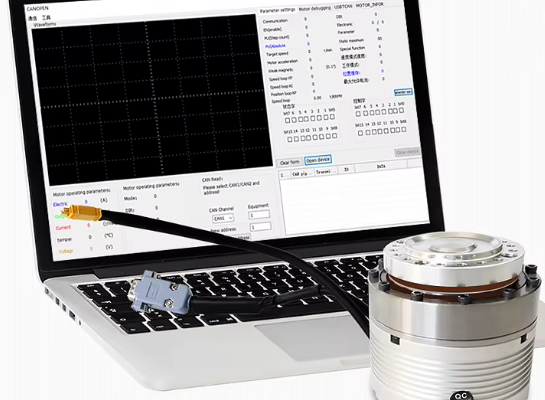
支持SDO,TPDO RPDO
在关节模组中,采用 CANopen 协议的主机软件可以有效地管理和监控各个关节的电机状态以及修改相关参数。
监控电机的运行状态,速度和扭矩监测,修改电机速度参数,扭矩限制修改,位置监控参数修改
- 电机通电后,内部有一个充电电路给电池充电
- 电机不通电后,带动电机轴转动唤醒编码器,继续记忆位置,电池电流消耗仅为0.07mA
- 电池电量下降报警
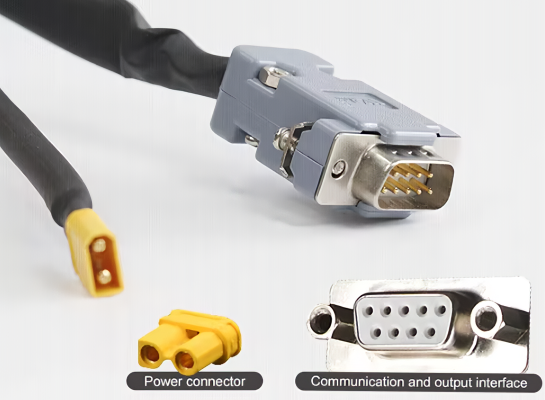
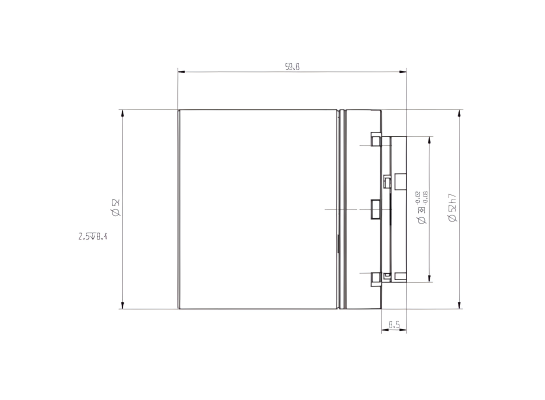
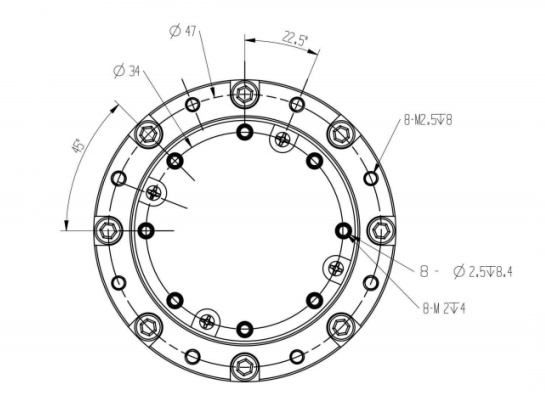
尺寸和接口
应用案例
该系列关节模块执行器可应用于工业机器人、协作机械臂、两足和四足仿生机器人、医疗机器人(手术和康复机器人等)、AGV车辆、果蔬采摘机械臂、摄像头等。






