












Product Description

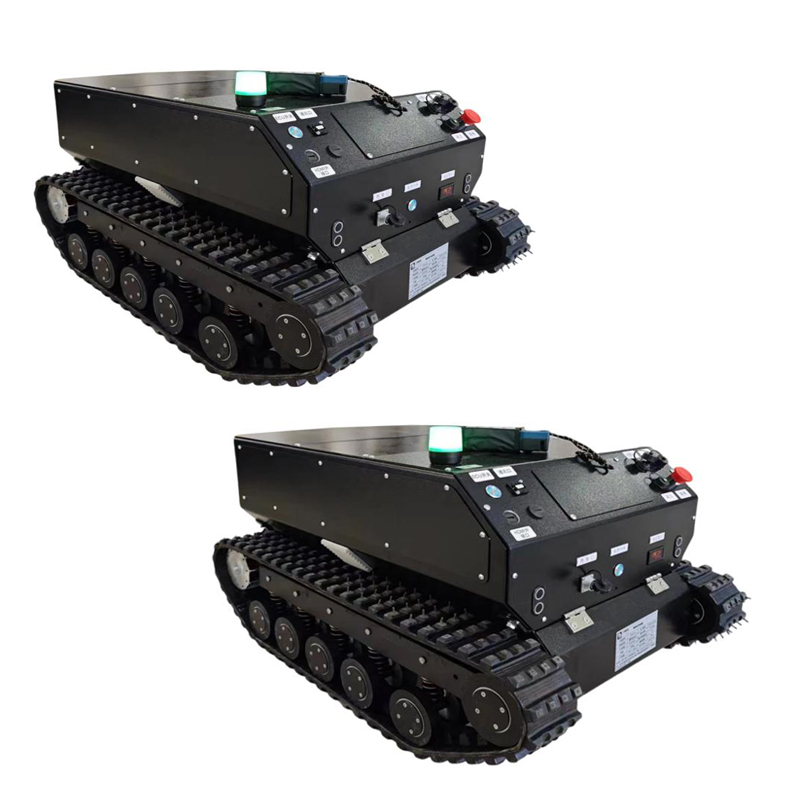
The crawler chassis robot uses two crawler wheels to drive the chassis, and a robotic arm can be optionally installed on the top layer. The chassis vehicle can be remotely controlled by the Easyless remote control to move forward, backward, turn left, and turn right, and the chassis vehicle can be accelerated by the acceleration button. The mode can be switched to automatic mode, but the remote control has the highest priority, and the automatic mode can be interrupted at any time by pressing the remote control button.
At the same time, the rear side is also equipped with chassis emergency stop, power switch, air pump switch (optional), ECU switch, voltage display, debugging communication port, USB3.0 and alarm indicator. (Optional: The mechanical arm is equipped with arm emergency stop, arm drag, arm power button, arm power off button, arm start indicator, arm system error indicator). The charging port is located on the battery body at the rear side of the robot. It can move forward through the navigation camera RFID with the chassis patrol line, or it can navigate and walk through GPS automatic driving. Note: GPS outdoor driving is optional.
Product Features

Drive and action control features
It uses two track wheels to drive the chassis. This driving method gives the robot good stability and the ability to adapt to complex terrain. In terms of remote control operation, the chassis can be easily controlled to move forward, backward, turn left, and turn right through the EasyDrive remote control, which is convenient to operate. In addition, it is equipped with an acceleration button to accelerate the chassis to meet the action requirements under different speed requirements.

Navigation Features
The robot has multiple navigation methods. On the one hand, it can move forward through the navigation camera RFID and chassis line patrol, which can achieve accurate path following in specific environments. On the other hand, it can also navigate and walk through GPS automatic driving (GPS outdoor driving is optional), providing a variety of options for the robot's automatic navigation in different scenarios.
Product parameters
| Name | Product Model | Indicator | Parameters |
|---|---|---|---|
| Crawler type traveling chassis | TSRDP-5 | Motor power | 2*600W |
| Travel speed | 0-0.7m/s | ||
| Maximum climbing angle | 15° | ||
| Load | 100kg | ||
| Remote control distance | 20m | ||
| Chassis vehicle obstacle avoidance system | Ultrasonic Sensors | ||
| Obstacle detection distance | 20cm | ||
| Navigation method | Visual navigation method / laser navigation | ||
| Navigation accuracy | 20mm | ||
| Driver power supply | 18VDC~80VDC | ||
| Maximum continuous current | 15A | ||
| Operating temperature | -10℃~40℃ | ||
| Control mode | SVPWM chopping control | ||
| Communication function | CAN 1:110 communication, supports MOTECIAN, CANOPEN protocols | ||
| Encoder feedback | 2500-line incremental encoder |
Service
Tianshun (Wuhan) Technology has core technologies in the fields of deep learning, reinforcement learning, 3D vision, and robot servo control. The proportion of the company's R&D personnel is higher than 90%, and the proportion of master's and doctoral personnel is higher than 60%. The average age is about 30 years old. They graduated from well-known domestic and foreign universities, such as Peking University, Tokyo Institute of Technology, Zhejiang University, Huazhong University of Science and Technology, Wuhan University of Science and Technology, etc., and have many years of experience in vision and robot project development and implementation in the industry. The company has obtained 5 utility model patents, 8 software copyrights, 9 utility model patents, 15 software copyrights, and 2 invention patents.
Pack
- Our crawler chassis robot is carefully packaged to provide all-round protection for transportation and storage.
- The packaging of this crawler chassis robot is sturdy and reliable, ensuring that the robot arrives safely without any damage during transportation.

Transport
In the process of transporting crawler chassis robots, we use professional logistics solutions. Whether it is the smooth driving of land transportation or the proper placement of air transportation, every link has been carefully planned. The professional transportation team and special transportation equipment ensure that the robot will not be damaged during transportation, ensuring that it can arrive at the destination in the best condition, and start an efficient operation journey for customers.







