














Product Description
OD 80mm Small size robot joint actuator servo motor is mainly used for Robot Arm, intergrated harmonic reducer, encoder, dc motor and driver. The robot joint servo motor could be used in robot arm joint directly, help build robot joints quickly.



Product parameters
| Model | Parameter | M8010(B)E17B50L | M8010(B)E17B80L | M8010(B)E17B100L |
| Overall parameter | Motor rated voltage | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| Motor rated current | 3.5A | 3.5A | 3.5A | |
| Output torque after deceleration | 34NM | 35NM | 51NM | |
| Weight | 1KG | 1KG | 1KG | |
| Speed range after deceleration | 0~30RPM | 0~18RPM | 0~15RPM | |
| Reducer parameter | Reduction ratio | 50 | 80 | 100 |
| Rated torque | 34NM | 35NM | 51NM | |
| Peak start-stop torque | 44NM | 56NM | 70NM | |
| Backlash | <20 arc seconds | <20 arc seconds | <20 arc seconds | |
| Design life | 8500hour | 8500hour | 8500hour | |
| Motor parameter | Torque | 1NM | 1NM | 1NM |
| Rated speed | 1500RPM | 1500RPM | 1500RPM | |
| Maximum rotational speed | 2000RPM | 2000RPM | 2000RPM | |
| Power | 100W | 100W | 100W | |
| Resistance | 0.86 | 0.86 | 0.86 | |
| Inductance | 0.8mh | 0.8mh | 0.8mh | |
| Rotary inertia | 0.69x10-4 KG/M2 | 0.69x10-4KG/M2 | 0.69x10-4KG/M2 | |
| Feedback signal | Multi-turn absolute encoder (15-bit single-turn 16-bit multi-turn) | |||
| Cooling mode | Natural cooling | |||
| Position Control Mode | Maximum input pulse frequency | 500KHz | ||
| Pulse instruction mode | Pulse + direction, A phase +B phase(need controller support AB pulse) | |||
| Electronic gear ratio | Set up 1~65535 to 1~ 65535 | |||
| Location sampling frequency | 2KHz | |||
| Protection function | Clock-motor alarm, over current alarm | |||
| Communication interface | Canopen (CAN Communication) /Modbus(485 communication) | |||
| Environment | Ambient temperature | 0~40° | ||
| Max. permissible temperature of motor | 85° | |||
| Humidity | 5~95% | |||
Product Display
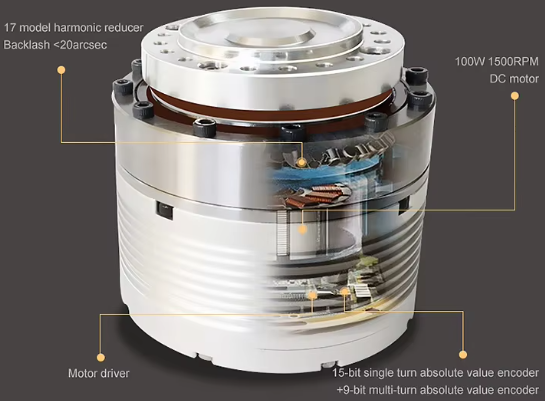
Joint module is a highly integrated mechanical component, which combines motor, reducer, encoder and harmonic reducer to achieve high precision motion control. This integrated design makes the joint module widely used in industrial robots, automation equipment and other fields.
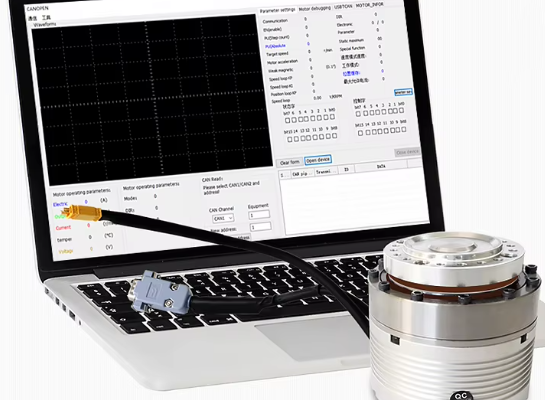
Support SDO TPDO RPDO
In the joint module, the host software using CANopen protocol can effectively manage and monitor the motor state of each joint and modify the related parameters.
Monitor motor running status, speed and torque monitoring, modify motor speed parameters, torque limit modification, position monitoring parameters modification
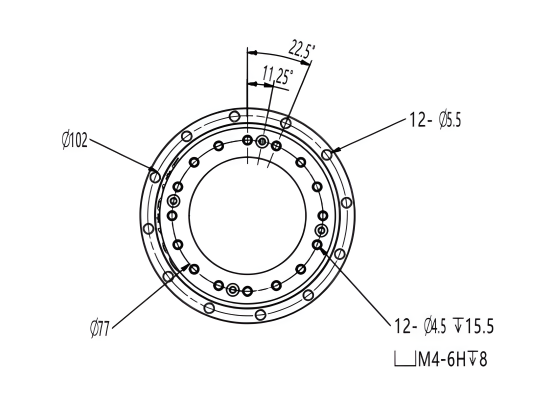
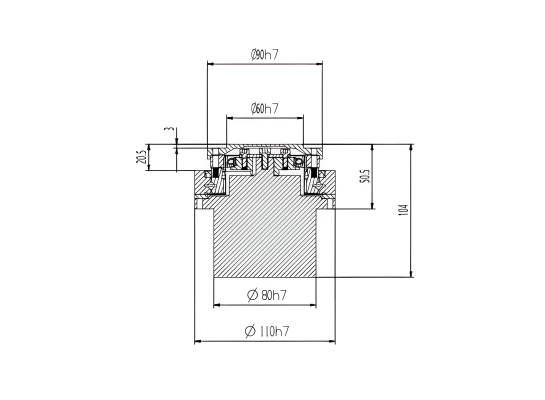
Size & Interface
Application Cases
The limb movement of the humanoid service robot depends on the joint module. They can be used in hotel reception services, robots through the joint module control arm and body movements, such as guiding guests, delivery and other service behaviors. Its joint module can make the robot's movements more natural and smooth, improving the user experience.
Devices such as exoskeleton robots for limb rehabilitation use joint modules to assist patients in rehabilitation training. The joint module can provide help or resistance depending on the patient's stage of recovery and movement ability. For example, for rehabilitation after knee injury, the knee module of the exoskeleton robot can guide the patient to the correct flexion and extension movement, and at the same time can record the movement data to provide a reference for doctors to adjust the rehabilitation program.









