














产品描述
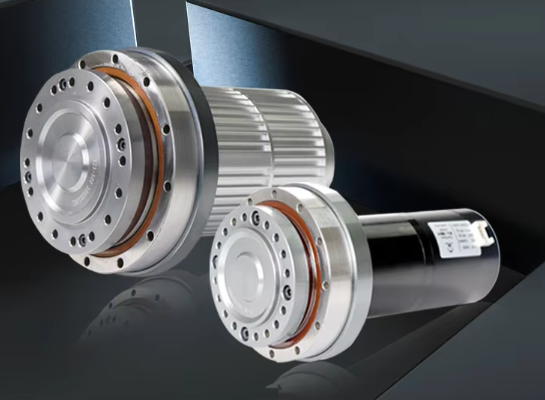
小尺寸机器人关节执行器伺服电机主要用于机器人手臂,集成谐波减速器,编码器,直流电机和驱动器。机器人关节伺服电机可直接用于机器人手臂关节,有助于快速构建机器人关节。


产品参数
| 参数 | M4215E14B50L | M4215E14B50L | M4215E14B100L | |
| 总体参数 | 电机额定电压 | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| 电机额定电流 | 2A | 2A | 2A | |
| 减速后输出扭矩 | 10NM | 10NM | 10NM | |
| 重量 | 0.8KG | 0.8KG | 0.8KG | |
| 减速后的速度范围 | 0~40RPM | 0~25RPM | 0~20RPM | |
| 减速机参数 | 减速比 | 50 | 80 | 100 |
| 额定扭矩 | 7NM | 10NM | 10NM | |
| 启停峰值扭矩 | 23NM | 30NM | 36NM | |
| 背隙 | <10 arc seconds | < 10arc seconds | < 10arc seconds | |
| 使用寿命 | 8500hour | 8500hour | 8500hour | |
| 电机参数 | 转矩 | 0.5NM | 0.5NM | 0.5NM |
| 额定转速 | 1500RPM | 1500RPM | 1500RPM | |
| 最大转速 | 2000RPM | 2000RPM | 2000RPM | |
| 功率 | 50W | 50W | 50W | |
| 电阻 | 2.65 | 2.65 | 2.65 | |
| 电感 | 1.1mh | 1.1mh | 1.1mh | |
| 转动惯量 | 0.9139x10-5 KG/M 2 | 0.9139x10-5 KG/M 2 | 0.9139x10-5 KG/M 2 | |
| 反馈信号 | 多圈绝对编码器(15位单圈和16位多圈) | |||
| 冷却方式 | 自然冷却 | |||
| 位置控制方式 | 最大输入脉冲频率 | 500KHZ | ||
| 脉冲指令方式 | 脉冲+方向,A相+B相(需要控制器支持AB脉冲) | |||
| 电子传动比 | 设置“1~65535”为“1~65535” | |||
| 位置采样频率 | 2KHZ | |||
| 保护功能 | 锁电机报警,过流报警 | |||
| 通信接口 | Canopen (CAN通信)/Modbus(485通信) | |||
| 环境 | 环境温度 | 0 ~ 40° | ||
| 电机允许最高温度 | 85° | |||
| 湿度 | 5 ~ 95% | |||
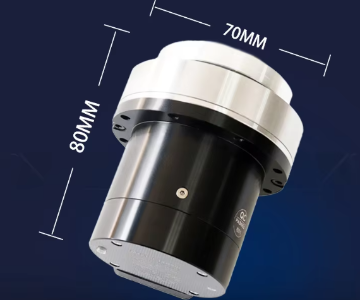
产品展示
1.隔离CAN通信(EasyCan协议,简单,快速启动,速率1M)。支持轮廓位置模式和周期同步模式。
2.配有17个(50/80/100)谐波减速器
3.24位多回路绝对编码器(单回路15位+多回路9位)(需要电池)。
4.多级DD电机结构,大扭矩输出。
5.集成伺服,简化布线,体积超小。
6.低噪音、低振动、高速定位、高可靠性。
7.FOC场定向矢量控制,支持位置/速度闭环。
8.在给定的脉冲状态下,可以在零迟滞下工作,遵循零迟滞。
9.设有CAN上位机,用于监控电机状态和修改参数。

- 隔离的CANopen通信
- 内置隔离电源
- 低功耗多圈绝对值内置电池
- 自动充电
- 电机通电后,内部有一个充电电路给电池充电
- 电机不通电后,驱动电机轴旋转唤醒编码器并继续记忆位置,电池电流消耗仅为0.07mA
- 电池掉电告警
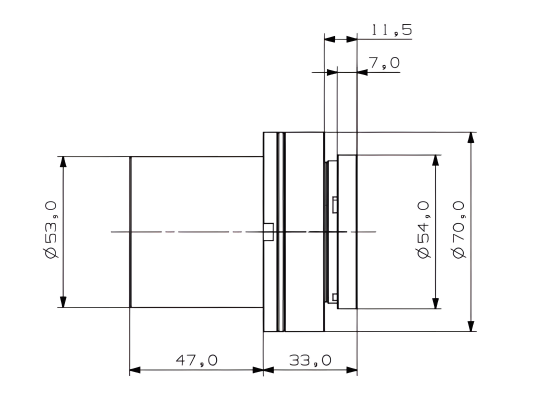
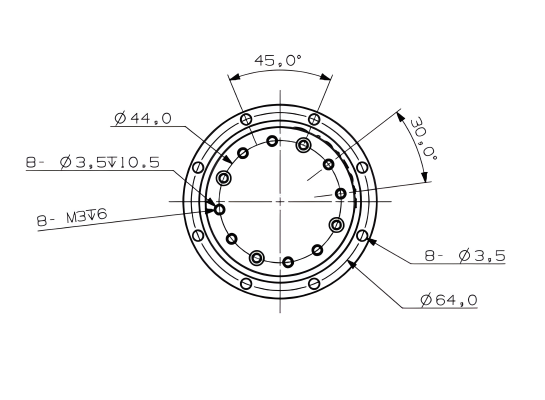
尺寸和接口
应用案例
该系列关节模块执行器可应用于工业机器人、协作机械臂、两足和四足仿生机器人、医疗机器人(手术和康复机器人等)、AGV车辆、果蔬采摘机械臂、摄像头等。
采用模块化设计,关节执行器紧凑,其重量、尺寸、安装方式、外观灯与传统产品相比都做了相当大的优化,主要应用于协作机器人和轻型机器人,可以在很大程度上满足小型化、轻量化、模块化的需求。该系列机器人关节电机还可广泛应用于数控机床、自动化生产、机器人手臂、仿人机器人、大型旋转平台等。









