คำอธิบายผลิตภัณฑ์



พารามิเตอร์ผลิตภัณฑ์
| รุ่น | YP05 | YP08/YP08D | YP11/YP11D | YP11L |
| ประเภทมอเตอร์ | มอเตอร์แรงบิดแบบไร้แปรงถ่าน | |||
| ประเภทตัวลดเกียร์ | การลดขนาดแบบดาวเคราะห์ | |||
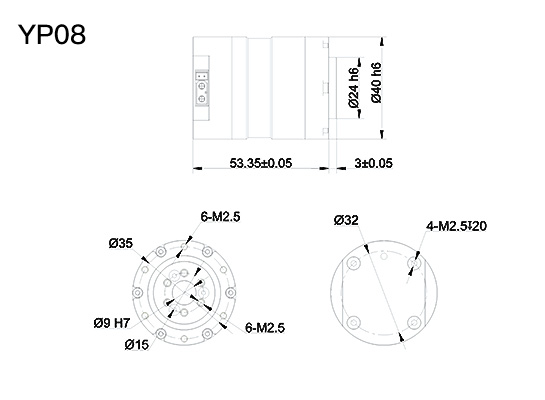
| เส้นผ่านศูนย์กลาง | 32mm | 40mm | 52mm | 52mm |
| ความยาว | 33.4mm | 52/48mm | 64/61mm | 82mm |
| น้ำหนัก | 82g | 190/199g | 391/436g | 517g |
| อัตราส่วนตัวลดเกียร์ | 6:1 | 36:1 | ||
| ระยะการตีกลับ | 12arcmin | |||
| เสียงรบกวน | <70db | |||
| ช่วงอุณหภูมิ | -20~80℃ | |||
| แรงดันไฟฟ้าในการทำงาน | 24v | |||
| กำลังสูงสุด | 35w | 36w | 60w | 72w |
| ความเร็วที่กำหนด | 50rpm | |||
| แรงบิดที่กำหนด | 0.2nm | 1.0nm | 6.6nm | 12nm |
| แรงบิดสูงสุด | 0.48nm | 2.2nm | 14nm | 18nm |
| ค่าสัมประสิทธิ์แรงบิด | 0.2nm/a | 1.1nm/a | 2.2nm/a | 6nm/a |
| ความจุแบริ่งแนวแกน | 1284N | 1605N | 1605N | |
| ความจุแบริ่งแนวรัศมี | 2520N | 3150N | 3150N | |
มุมมองผลิตภัณฑ์
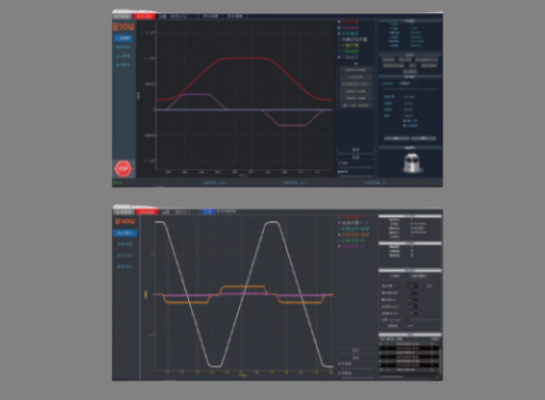
Software operation interface:
A new generation of micro-integrated flexible servo joints, with internally integrated high-precision reducers, high-energy density torque motors, and high-performance drives. The products have high integration, high precision, and stable performance, and are particularly suitable for products such as bionic robots and robotic arms.
UBUNTU and WINDOWS versions of the host computer are provided to facilitate users to quickly verify. At the same time, C/C++API is provided, which can integrate LINUX-
(ROS)\WINDOWS systems to achieve rapid mass production of products.
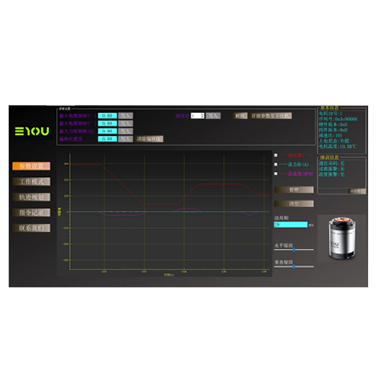
การตั้งค่าพารามิเตอร์ที่สมบูรณ์
โหมดการทำงานของโปรไฟล์วิถีการบูรณาการภายใน การเร่งความเร็วและการลดความเร็ว ขีดจำกัดความเร็ว ขีดจำกัดแรงบิด และขีดจำกัดอุณหภูมิ สามารถตั้งค่าได้ทั้งหมด
ความถี่ลูปกระแส 20kHz ลูปความเร็ว 10kHz ลูปตำแหน่ง 1kHz พารามิเตอร์ลูปทั้งสามเปิดอยู่ และสามารถดำเนินการโหมดการทำงานต่างๆ ได้อย่างอิสระ
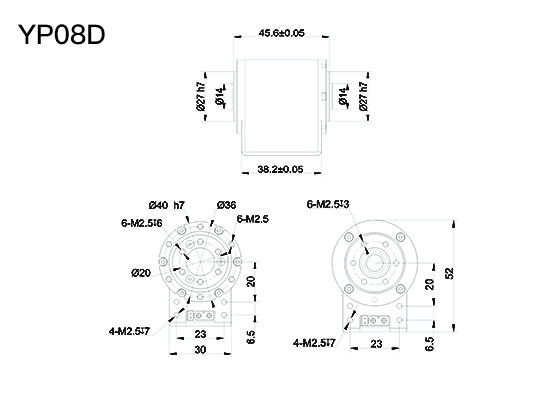
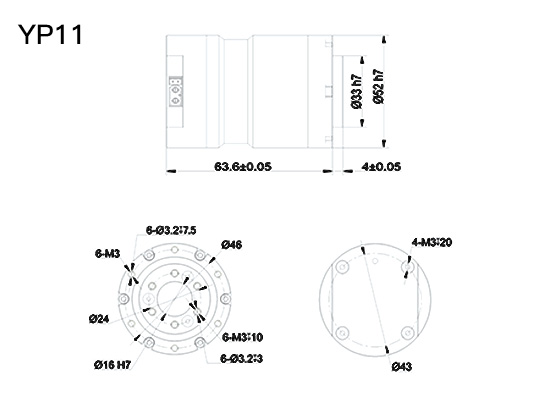
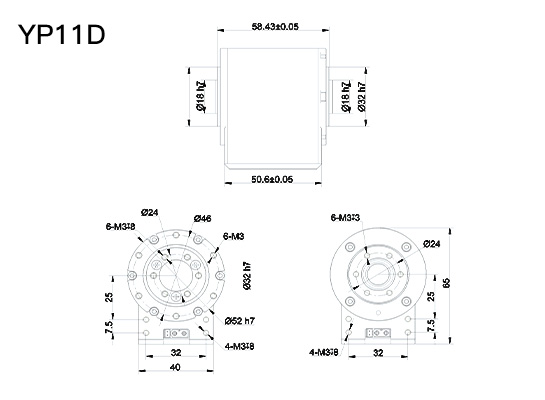
ขนาดและอินเตอร์เฟซ
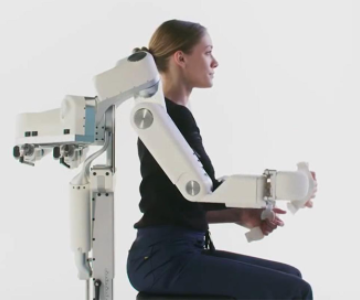
กรณีการสมัคร
อุปกรณ์สวมใส่ที่ออกแบบขึ้นโดยอาศัยแรงตอบสนองจากข้อต่อ โดยนำหลักสรีรศาสตร์ ไบโอนิกส์ และความรู้ที่เกี่ยวข้องอื่นๆ มาใช้กับสาขาของหุ่นยนต์ โดยผสมผสานสติปัญญาของมนุษย์และความแข็งแกร่งทางกายภาพของหุ่นยนต์ เพื่อควบคุมหุ่นยนต์จากระยะไกลและรับรู้แรงตอบสนองจากด้านหุ่นยนต์ ไม่ว่าจะเป็นการช่วยเหลือด้านพลังงานหรือการฟื้นฟูทางการแพทย์ หุ่นยนต์โครงกระดูกภายนอกไม่เพียงแต่เป็นแนวโน้มทางเทคโนโลยีใหม่เท่านั้น แต่ยังเผชิญกับความท้าทายมากมาย เช่น ราคา ประสิทธิภาพพลังงาน การประสานงาน และความไวในการโต้ตอบ