














คำอธิบายผลิตภัณฑ์
โมดูลเซอร์โวเซอร์โวแบบบูรณาการใช้การเชื่อมต่อบัสแบบอนุกรมซึ่งช่วยลดความซับซ้อนของการเดินสายระบบได้อย่างมาก ในเวลาเดียวกัน ข้อต่อมีขนาดเล็ก มีความหนาแน่นของพลังงานสูง และรองรับการควบคุมตำแหน่งที่ยืดหยุ่นและแรงตอบสนอง ถือเป็นโซลูชันที่ยอดเยี่ยมสำหรับหุ่นยนต์จำลองและสัตว์ไบโอนิกส์ เราสามารถจัดหามอเตอร์เซอร์โวสำหรับข้อต่อทั้งตัวของหุ่นยนต์จำลองด้วยประสิทธิภาพที่เสถียรและต้นทุนต่ำ เราได้บรรลุการผลิตจำนวนมากในระดับขนาดใหญ่และสร้างความร่วมมือกับบริษัทหุ่นยนต์จำลองจำนวนมากในประเทศและต่างประเทศ



พารามิเตอร์ผลิตภัณฑ์
| รุ่น | YP05 | YP08/YP08D | YP11/YP11D | YP11L |
| ประเภทมอเตอร์ | มอเตอร์แรงบิดแบบไร้แปรงถ่าน | |||
| ประเภทตัวลดเกียร์ | การลดขนาดแบบดาวเคราะห์ | |||
| เส้นผ่านศูนย์กลาง | 32mm | 40mm | 52mm | 52mm |
| ความยาว | 33.4mm | 52/48mm | 64/61mm | 82mm |
| น้ำหนัก | 82g | 190/199g | 391/436g | 517g |
| อัตราส่วนตัวลดเกียร์ | 6:1 | 36:1 | ||
| ระยะการตีกลับ | 12arcmin | |||
| เสียงรบกวน | <70db | |||
| ช่วงอุณหภูมิ | -20~80℃ | |||
| แรงดันไฟฟ้าในการทำงาน | 24v | |||
| กำลังสูงสุด | 35w | 36w | 60w | 72w |
| ความเร็วที่กำหนด | 50rpm | |||
| แรงบิดที่กำหนด | 0.2nm | 1.0nm | 6.6nm | 12nm |
| แรงบิดสูงสุด | 0.48nm | 2.2nm | 14nm | 18nm |
| ค่าสัมประสิทธิ์แรงบิด | 0.2nm/a | 1.1nm/a | 2.2nm/a | 6nm/a |
| ความจุแบริ่งแนวแกน | 1284N | 1605N | 1605N | |
| ความจุแบริ่งแนวรัศมี | 2520N | 3150N | 3150N | |
มุมมองผลิตภัณฑ์
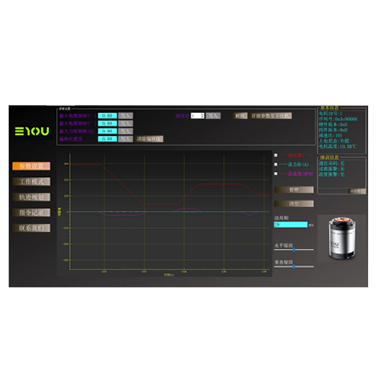
การตั้งค่าพารามิเตอร์ที่สมบูรณ์
โหมดการทำงานของโปรไฟล์วิถีที่ผสานรวมภายใน การเร่งความเร็วและการชะลอความเร็ว ขีดจำกัดความเร็ว ขีดจำกัดแรงบิด และขีดจำกัดอุณหภูมิ สามารถตั้งค่าได้ทั้งหมด
ความถี่ลูปปัจจุบัน 20kHz ลูปความเร็ว 10kHz ลูปตำแหน่ง 1kHz พารามิเตอร์ลูปทั้งสามเปิดอยู่ และสามารถดำเนินการโหมดการทำงานต่างๆ ได้อย่างอิสระ
1. ตัวลดดาวเคราะห์โลหะที่มีความแม่นยำสูง
เฟืองโลหะ ทนทานต่อแรงบิดสูง ความแม่นยำสูง ระยะการตีกลับดีกว่า +-12 อาร์กนาที (0.2 องศา) เสียงรบกวนต่ำ ความเร็วสูง <70db ความเร็วต่ำเงียบ โครงสร้างแบริ่งคู่ที่ปลายเอาต์พุต ไม่มีระยะห่างตามแนวแกน
2. มอเตอร์แรงบิดความหนาแน่นสูง
มอเตอร์แรงบิดโรเตอร์ภายนอกแบบไร้แปรงถ่านความหนาแน่นสูง แรงบิดแบบเฟืองต่ำ อายุการใช้งานยาวนานเป็นพิเศษ
3. ตัวเข้ารหัสสัมบูรณ์คู่
ความแม่นยำของปลายมอเตอร์ 16 บิต ค่าสัมบูรณ์แบบรอบเดียวปลายเอาต์พุต ไม่สูญเสียมุมปิดเครื่อง ไม่ต้องใช้แบตเตอรี่ภายนอก
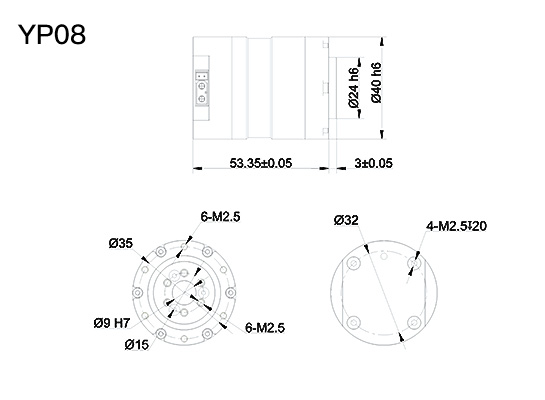
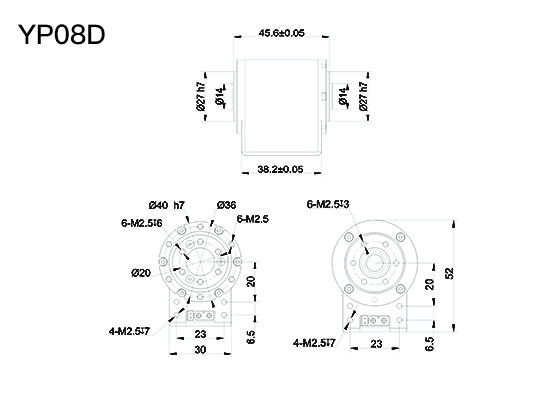
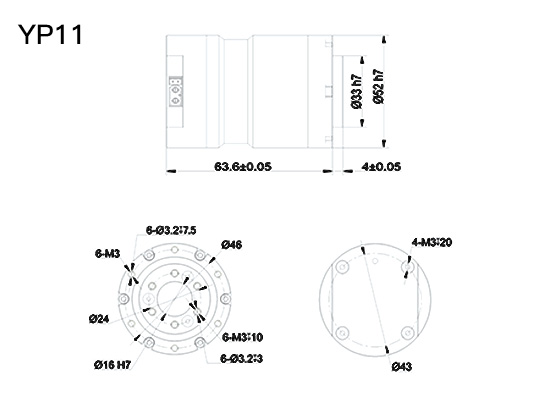
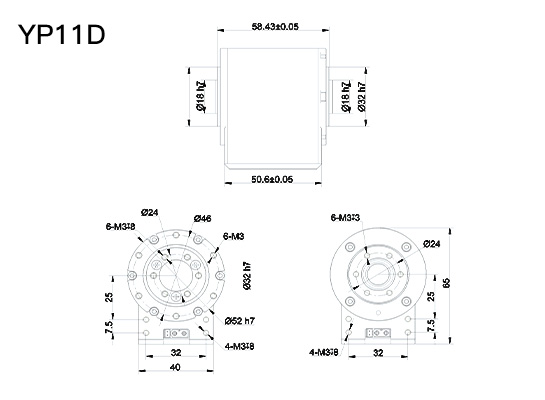
ขนาดและอินเตอร์เฟซ
กรณีการสมัคร
โมดูลเซอร์โวใช้การออกแบบแบบกลวง ซึ่งเหมาะเป็นพิเศษสำหรับแขนหุ่นยนต์ร่วมมือหกแกน วงจรปิดความเร็วสูงของโมดูลสามารถควบคุมความแข็งแกร่งและความแม่นยำของแขนหุ่นยนต์ได้อย่างยืดหยุ่น ทำให้คอมพิวเตอร์โฮสต์มีตัวเครื่องที่มีประสิทธิภาพสูง ข้อต่อของหุ่นยนต์ที่มีภาระต่างกันสามารถรวมกันได้อย่างอิสระ และมีการให้การสนับสนุนทางเทคนิคของตัวเครื่องและซอฟต์แวร์ เพื่อให้ลูกค้าสามารถสร้างระบบหุ่นยนต์ของตนเองได้อย่างรวดเร็ว









