


คำอธิบายผลิตภัณฑ์
เซอร์โวซีรีส์นี้ผสานรวมส่วนประกอบหลักสามส่วน ได้แก่ ตัวลดความถี่ มอเตอร์ และไดรฟ์เข้าด้วยกันอย่างดีเยี่ยมเพื่อสร้างโมดูลเซอร์โวแบบบูรณาการขนาดเล็กพิเศษ ข้อต่อใช้การออกแบบบัสและสายกลวงซึ่งช่วยลดความซับซ้อนของโครงสร้างระบบได้อย่างมาก ใช้การออกแบบแม่เหล็กคู่ที่มีความแม่นยำสูงและเบรกเสริมเพื่อตอบสนองสภาพการทำงานที่รุนแรงต่างๆ



พารามิเตอร์ผลิตภัณฑ์
| รุ่น | YG08 | YG11 | YG14 | YG17 | YG20 | YG25 | ||||||
| ประเภทมอเตอร์ | มอเตอร์แรงบิดโรเตอร์ด้านใน | |||||||||||
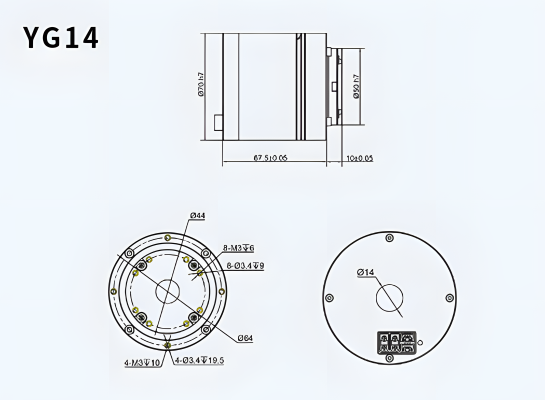
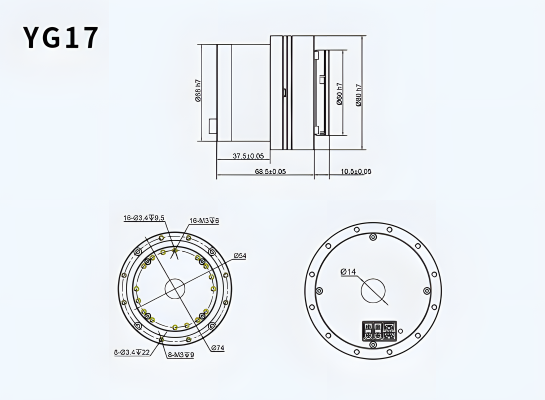
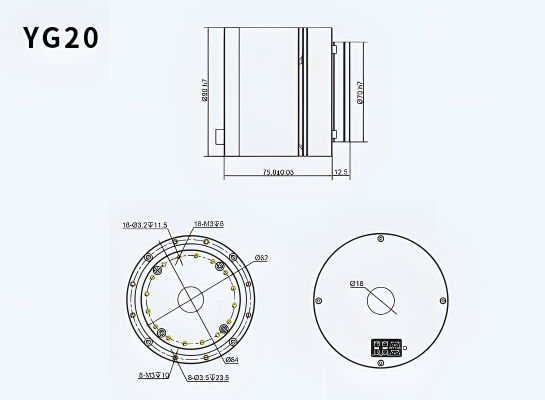
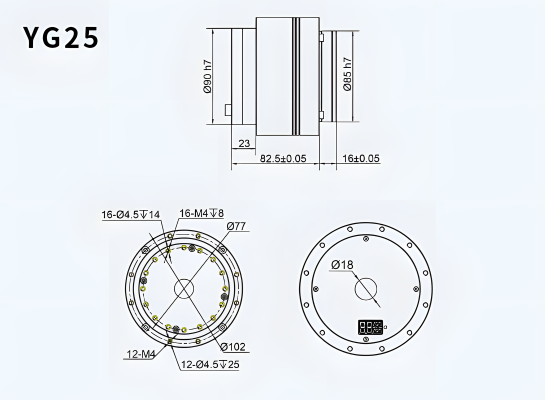
| เส้นผ่านศูนย์กลาง | 40mm | 52mm | 70mm | 80mm | 90mm | 110mm | ||||||
| เส้นผ่านศูนย์กลางภายในกลวง | 4.6mm | 6mm | 10.8mm | 10.8mm | 13mm | 13mm | ||||||
| น้ำหนัก | 188g | 495g | 1108g | 1350g | 1991g | 3098g | ||||||
| ระยะการตีกลับ | 15arcsec | |||||||||||
| เสียงรบกวน | <70db | |||||||||||
| ช่วงอุณหภูมิ | -20~80℃ | |||||||||||
| แรงดันไฟฟ้าที่ใช้งาน | 24~36v | 24~48v | ||||||||||
| กำลังไฟฟ้าที่กำหนด | 36w | 120w | 120w | 200w | 250w | 500w | ||||||
| อัตราส่วนความเร็ว | 51 | 101 | 51 | 101 | 51 | 101 | 51 | 101 | 81 | 121 | 81 | 121 |
| ความเร็วที่กำหนด | 60rpm | 30rpm | 60rpm | 30rpm | 60rpm | 30rpm | 60rpm | 30rpm | 38rpm | 25rpm | 38rpm | 25rpm |
| แรงบิดที่กำหนด | 1.0nm | 1.6nm | 6.6nm | 8.6nm | 18nm | 22nm | 30nm | 38nm | 52nm | 78nm | 96nm | 144nm |
| แรงบิดสูงสุด | 2.2nm | 3.5nm | 21nm | 24nm | 30nm | 38nm | 52nm | 66nm | 104nm | 156nm | 206nm | 220nm |
| ความแม่นยำของตัวเข้ารหัส | 19bit | |||||||||||
| ประเภทตัวเข้ารหัส | ถักแม่เหล็กคู่ | |||||||||||
มุมมองผลิตภัณฑ์

ตัวลดฮาร์มอนิกความแม่นยำสูงพร้อมเสียงรบกวนต่ำและความแม่นยำสูง
ตัวเข้ารหัสแม่เหล็กคู่ความแม่นยำสูง 19 บิต+19 บิต
มอเตอร์แรงบิดความหนาแน่นสูงพร้อมแรงบิดแบบเฟืองต่ำ

ซีรีส์เต็มของการออกแบบแบบกลวงที่มีเส้นผ่านศูนย์กลางภายนอกโมดูลกลวงที่เล็กที่สุดที่ 40 มม.
การออกแบบไดรฟ์ FOC ฮาร์ดแวร์เต็มรูปแบบ การคำนวณวงปิดความเร็วสูง 20khz
เบรกปิดเครื่องแบบบางพิเศษ
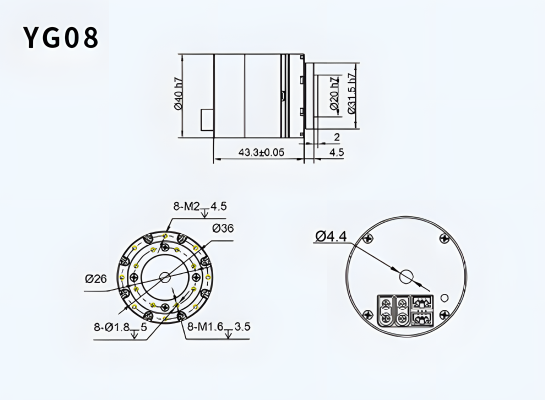
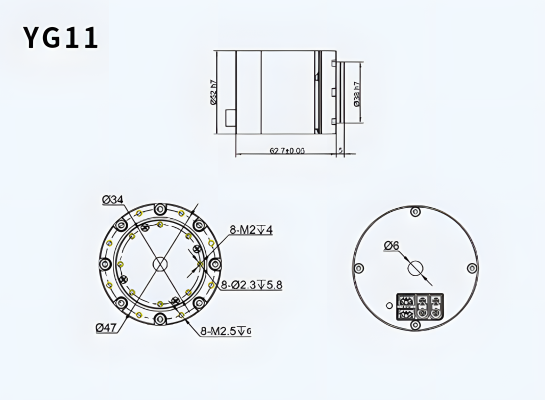
ขนาดและอินเตอร์เฟซ
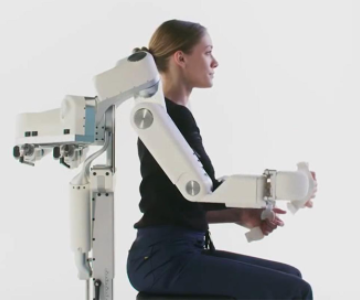
กรณีการสมัคร
โมดูลเซอร์โวใช้การออกแบบแบบกลวง ซึ่งเหมาะเป็นพิเศษสำหรับแขนหุ่นยนต์ร่วมมือหกแกน วงจรปิดความเร็วสูงของโมดูลสามารถควบคุมความแข็งแกร่งและความแม่นยำของแขนหุ่นยนต์ได้อย่างยืดหยุ่น ทำให้คอมพิวเตอร์โฮสต์มีตัวเครื่องที่มีประสิทธิภาพสูง ข้อต่อของหุ่นยนต์ที่มีภาระต่างกันสามารถรวมกันได้อย่างอิสระ และมีการให้การสนับสนุนทางเทคนิคของตัวเครื่องและซอฟต์แวร์ เพื่อให้ลูกค้าสามารถสร้างระบบหุ่นยนต์ของตนเองได้อย่างรวดเร็ว