














Product Description

XROSTANK is an educational robot developed based on the ROS operating system. It uses the Raspberry Pi development board as the main control and is equipped with high-performance hardware configurations such as laser radar, depth camera, high-performance magnetic encoding motor, etc. It can meet the development and learning of robot mapping navigation, path planning, motion control, autonomous driving, 3D vision, etc.



Product Features

Depth camera
Real-time video transmission
Secondary development of visual recognition and visual SLAM is possible
The robot has RGBD depth and deep learning
Laser scanning ranging radar
OPTMAG optical magnetic fusion (*meets Class 1 laser safety standards)
08m radius measurement range
360 degree scanning ranging
3860 times/second measurement frequency

Mecanum wheel
The wheel is made of ABS plastic and the rubber-coated wheel is made of rubber.
It has the characteristics of smooth operation and better grip.
Super powerful racing motor
All-metal gear structure, using all-metal gear materials,
More wear-resistant and longer service life
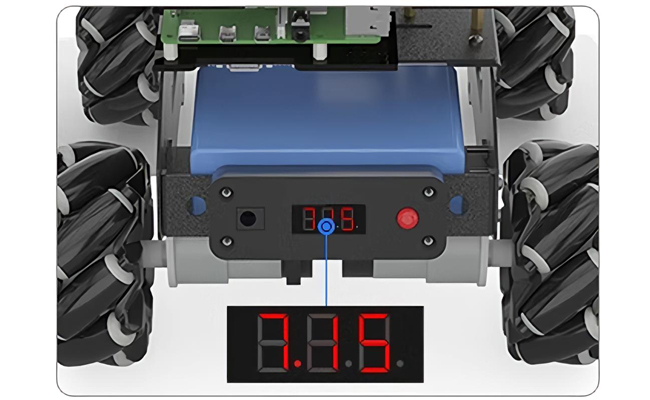
Battery voltage display
The tail of the robot can display the current voltage of the robot battery in real time,
and can also support one-button start of the robot.

7-inch touch screen
GUI interactive interface
The GUI interface can switch ROS functions such as map building, navigation and map saving with one click, and can also view various parameter information of the robot.

APP wireless
Remote control
When the robot starts, it sends out a WiFi hotspot signal by default. After the mobile phone connects to the signal, you can use the ROSXRMaster APP to easily control the robot car and switch ROS functions with one click.
Application Cases
The ROS robot Raspberry Pi programming smart car has demonstrated excellent performance in many fields with its deep vision SLAM mapping navigation and Mecanum wheels. In the field of education, it can be used as a teaching aid to stimulate students' interest in programming and robotics, cultivate innovative thinking and practical ability, and provide strong support for the development of various industries and talent training.



Technical Parameter
| Astra depth camera parameter description | |
|---|---|
| Working distance | 0.6m-8m |
| Safety | Class 1 Laser |
| Field of view | H 58.4°XV45.7° |
| Depth resolution & frame rate | 640*480 @30fps |
| Color image resolution | 640*480 @30fps |
| Data transmission interface | USB2.0 |
| Product Parameters | |
|---|---|
| Size | 307.5*243.2*319.4mm |
| Chassis structure | Adopts 4 Mecanum wheel drive structure, can move in all directions |
| Material | Aluminum alloy + acrylic |
| Core motherboard | Raspberry Pi 4B |
| Power supply method | 10000mAh 12v lithium battery pack, including charger |
| Battery life | ≤120min |
| Motor drive | DC brushed motor (with built-in 360AB encoding) |
| Remote control method | Android APP, PC computer |
| Compilation environment | Python/C++ |
| Communication interface | USB interface, IIC interface, Bluetooth |
| Operating system | XR-ROS human-computer interaction system |
| Sensor | Lidar S1 laser radar, depth camera, nine-axis IMU sensor |
| Voltage display | Real-time display of current battery voltage |
| Weight | ≈3.5KG |
| Storage space | 64GB |
Packing list
- Raspberry Pi McLennan radar car
- Charger
- Special storage box






