














产品描述

XROSTANK是一款基于ROS操作系统开发的教育机器人,使用树莓派开发板作为主控,并搭载了激光雷达、深度相机、高性能磁编码电机等高性能硬件配置,可满足机器人建图导航、路径规划、运动控制、自动驾驶、3D视觉等方面开发学习
XROSTANK不仅可以更好满足用户对复合型机器人的学习,还为ROS开发提供快速编写的集成方案。提供开发技术文档,涵盖机器人使用说明,二次开发指导,助您快速玩转ROS机器人



产品特性

深度摄像头
实时视频传输
可二次开发视觉识别、视觉SLAM
机器人具有RGBD深度、深度学习
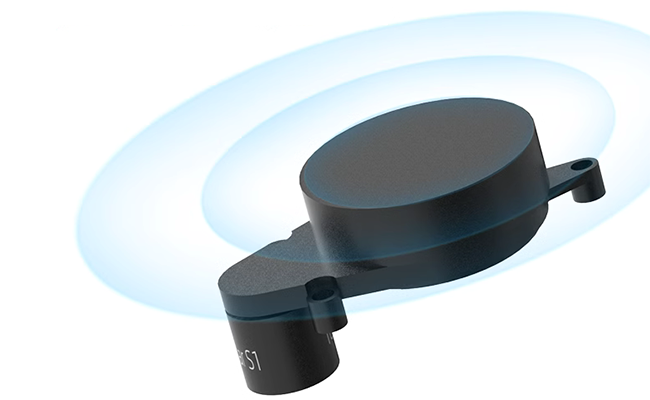
激光扫描测距雷达
OPTMAG光磁融合(*满足Classl级别的激光器安全标准)
08米半径 测量范围
360度 扫描测距
3860次/秒 测量频率

麦克纳姆轮
轮毅材质是ABS塑料,包胶轮为橡胶材质,
具有运行顺畅,抓地能力更好等特点
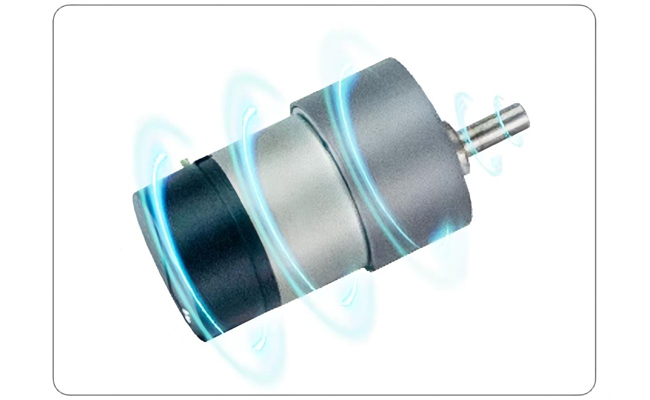
超强竞速马达
全金属齿轮结构,采用全金属齿轮材料,
使用更加耐磨延长使用寿命
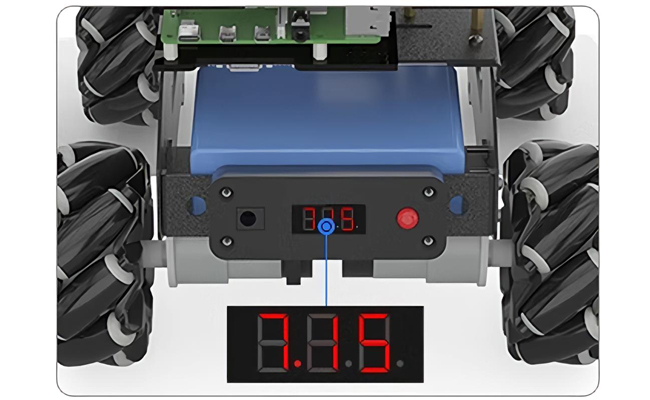
电池电压显示
机器人尾部可实时显示机器人电池当前电压,
另可支持一键启动机器人。

7英寸触摸屏
GUI交互界面
GUI界面可以一键切换建图导航保存地图等ROS功能操作,也可查看机器人各项参数信息。
APP无线
远程控制
机器人启动默认发出wifi热点信号,手机连接信号后使用ROSXRMaster APP可以很轻松控制机器人小车并一键切换ROS功能
应用案例
ROS 机器人树莓派编程智能小车凭借深度视觉 SLAM 建图导航以及麦克纳姆轮,在众多领域展现出卓越效能。在教育领域,作为教具激发学生对编程和机器人技术的兴趣,培养创新思维与实践能力,为各行业发展和人才培养提供有力支持。



技术参数
| Astra 深度相机参数说明 | |
|---|---|
| 工作距离 | 0.6m-8m |
| 安全性 | Class 1激光 |
| 视场角 | H 58.4°XV45.7° |
| 深度分辨率&帧率 | 640*480 @30fps |
| 彩色图像分辨率 | 640*480 @30fps |
| 数据传输接口 | USB2.0 |
| 产品参数 | |
|---|---|
| 尺寸 | 307.5*243.2*319.4mm |
| 底盘结构 | 采用4个麦克纳姆轮驱动结构,可全向移动 |
| 材质 | 合金铝+亚克力 |
| 核心主板 | Raspberry Pi 4B |
| 供电方式 | 10000mAh 12v锂电池组,含充电器 |
| 续航时间 | ≤120min |
| 电机驱动 | 直流有刷电机(自带360AB编码) |
| 遥控方式 | Android APP、PC电脑 |
| 编译环境 | Python/C++ |
| 通信接口 | USB接口、IIC接口、蓝牙 |
| 操作系统 | XR-ROS人机交互系统 |
| 传感器 | Lidar S1激光雷达、深度摄像头、九轴IMU传感器 |
| 电压显示 | 实时显示当前电池电压 |
| 重量 | ≈3.5KG |
| 存储空间 | 64GB |
包装清单
- 树莓派麦轮雷达车
- 充电器
- 专用收纳箱


