Product Description
VacuGrasp is a soft robotic gripper that is able to grip bottles, small objects or food items. Comes with soft fingers, our VacuGrasp guarantees no damage to your products. With a embedded vacuum suction cup, this gripper is able to operate in two modes - by suction and/or by finger gripper. In addition, each finger of VacuGrasp is also embedded with a metal endoskeleton to allow for controllable stiffness.


Product parameters
Product Weight | 830 g |
Gripping Width | Approx. 50 mm – 75 mm |
Manipulating Weight | Up to 0.9 kg, subject to the size of the object |
Gripping Mode | Finger gripping and vacuum suction |
Actuation Method | Clean, dry air up to 370 kPa |
Recommended Operating Pressure | 150 kPa |
Operating Temperature | Up to 100 °C |
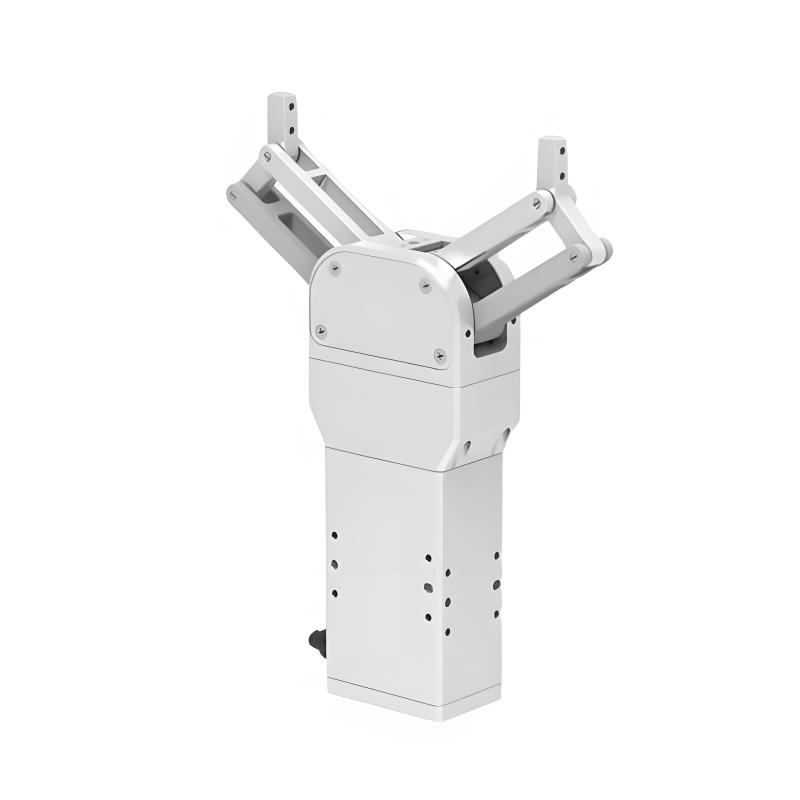
Product Display

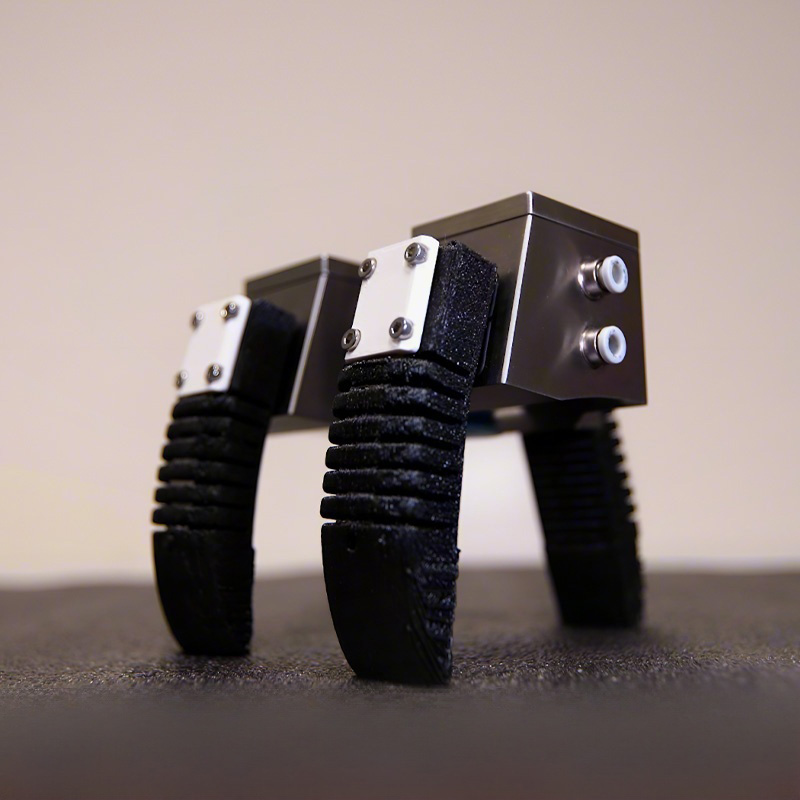
Controllable Stiffness
A metal endoskeleton is embedded in each soft finger. When engaged, the endoskeleton increases the stiffness and reinforces the load bearing capabilities of the finger while bent.

Customizable Design
The fingers are fabricated with 3D printing method instead of the traditional silicone moulding method, which makes it easier and less costly to customize the finger design.

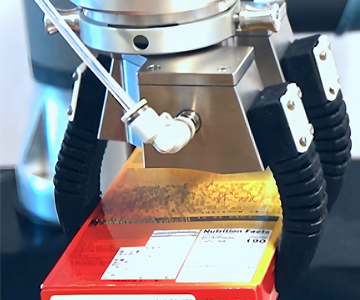
A suction cup is embedded in the palmar side of each gripper, that allows it to operate in three ways -
1) by suction only
2) by finger gripping only
3) simultaneous suction and finger gripping for added stability.

Dual operation mode
Embedded with a suction cup in the center, VG-2 allows for dual modes of operation – by gripping and/or by suction
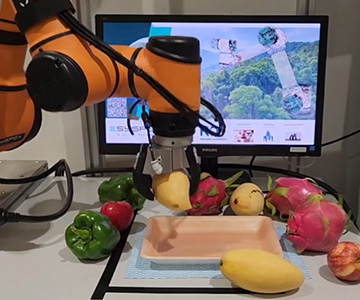
Application Cases
RoPlus specializes in providing soft robotic gripping solutions for our clients for a diverserange of applications, from food handling and consumer good packing to agri-harvesting.
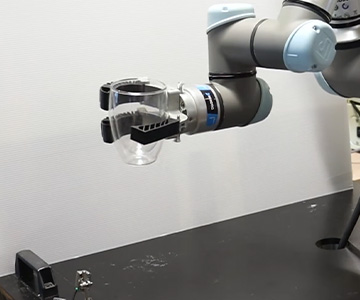
● Glassware
● FMCG sorting
● Food packing