Product Description
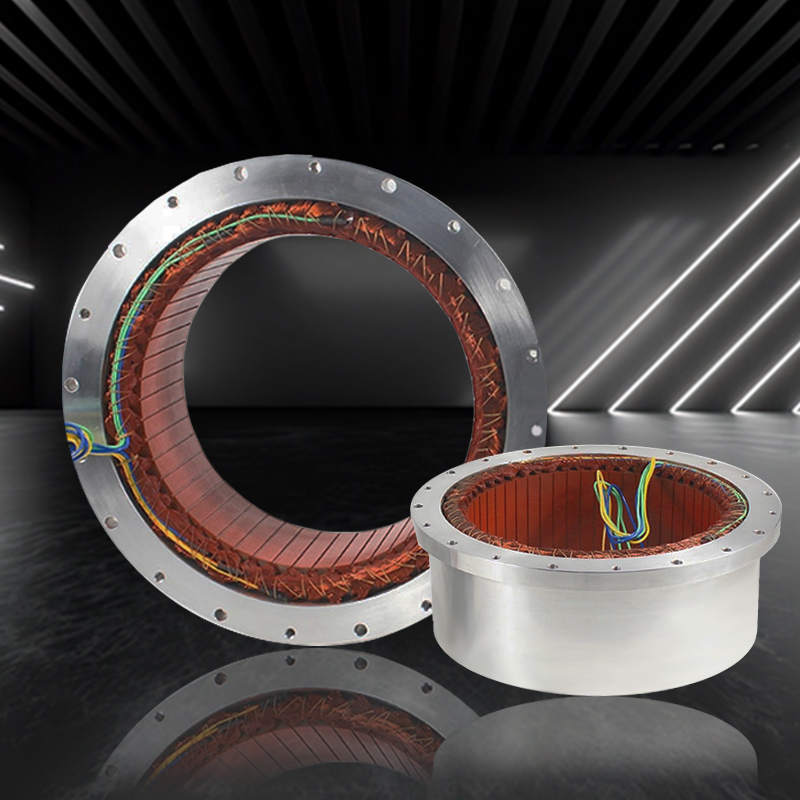
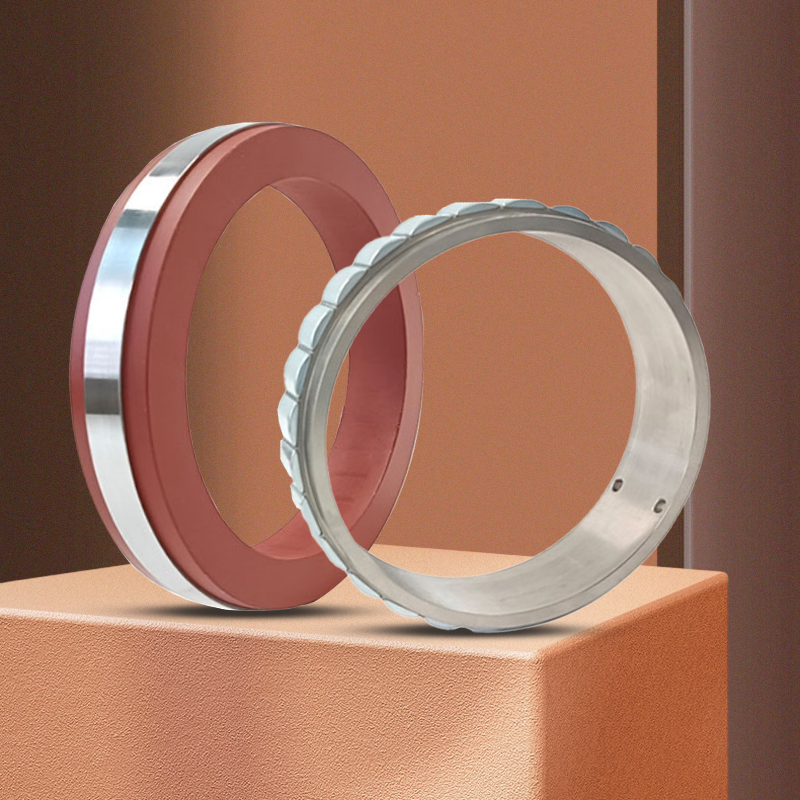
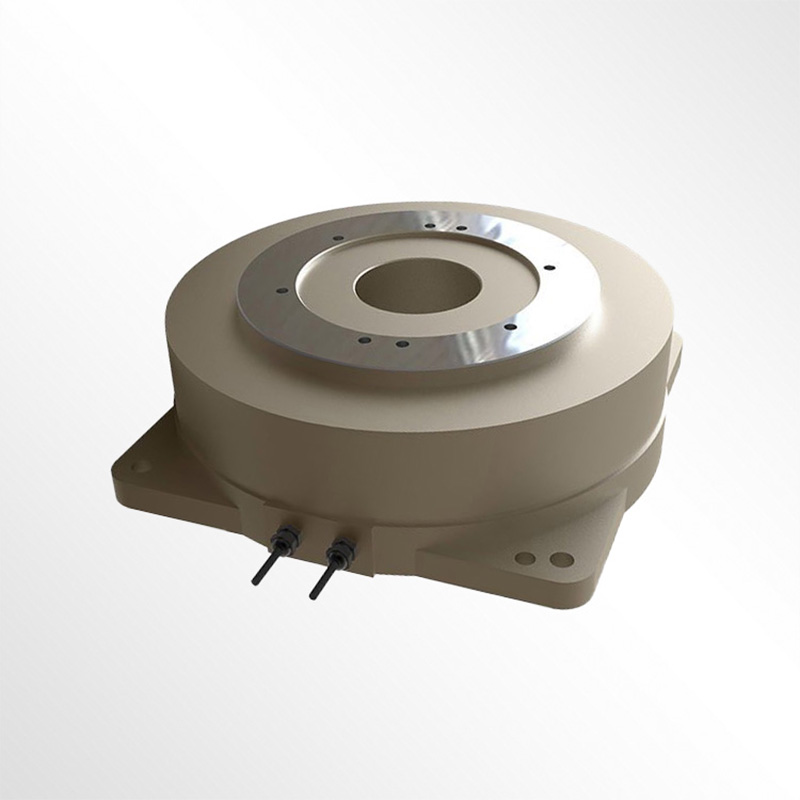
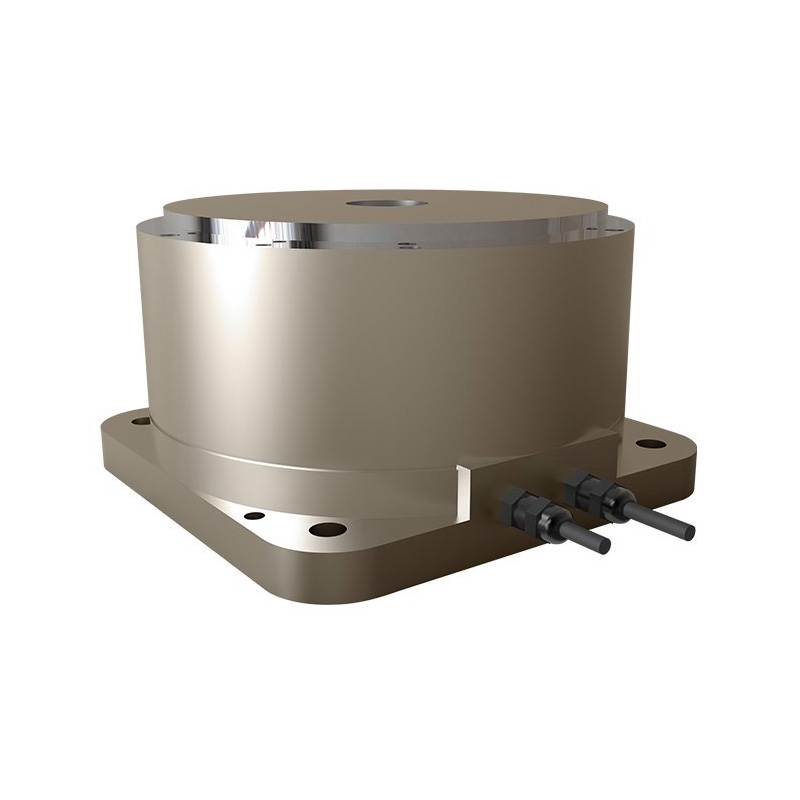
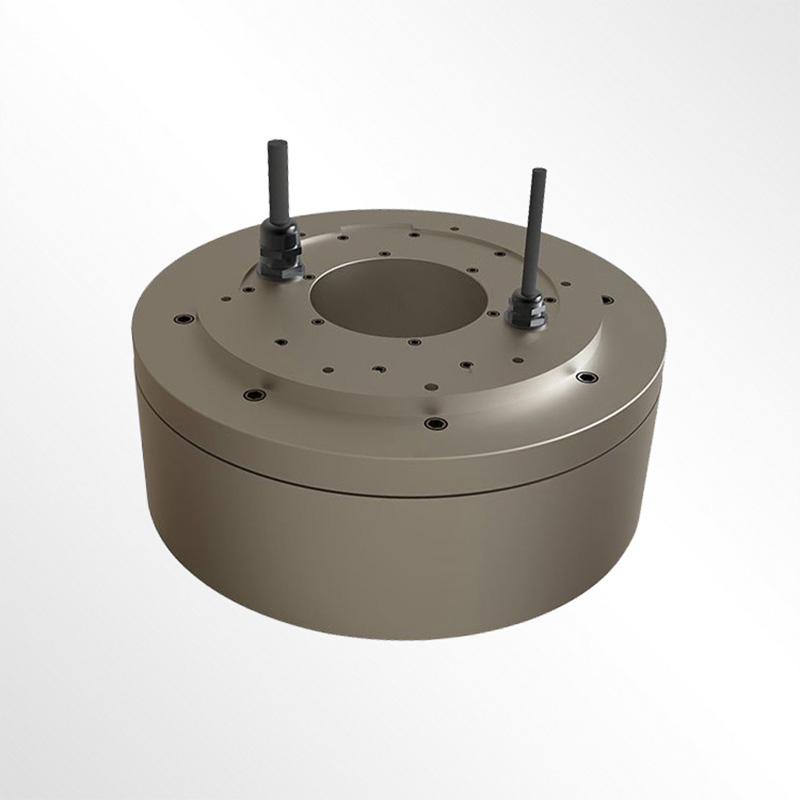
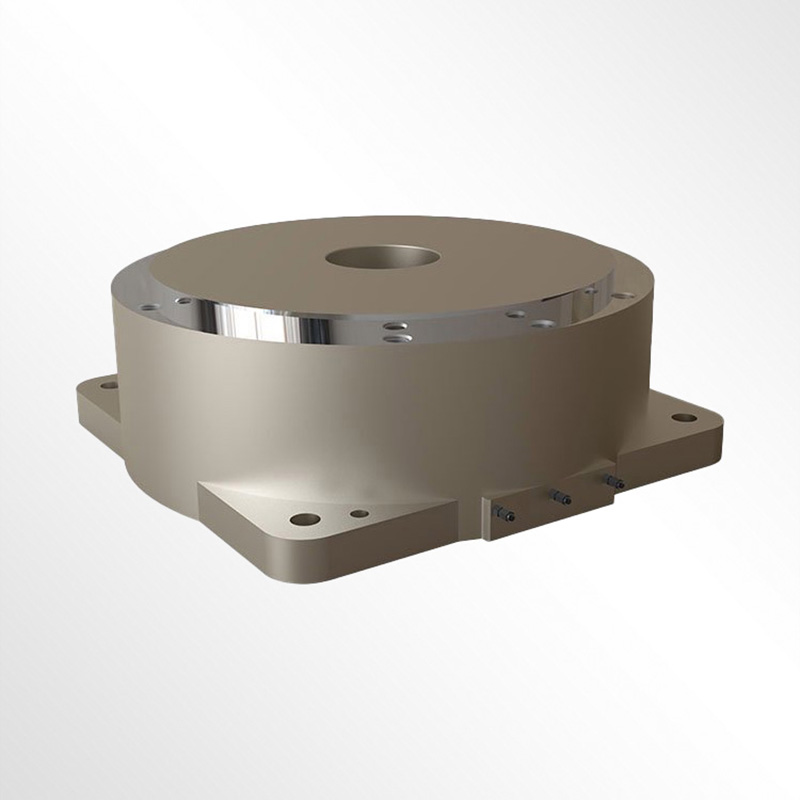
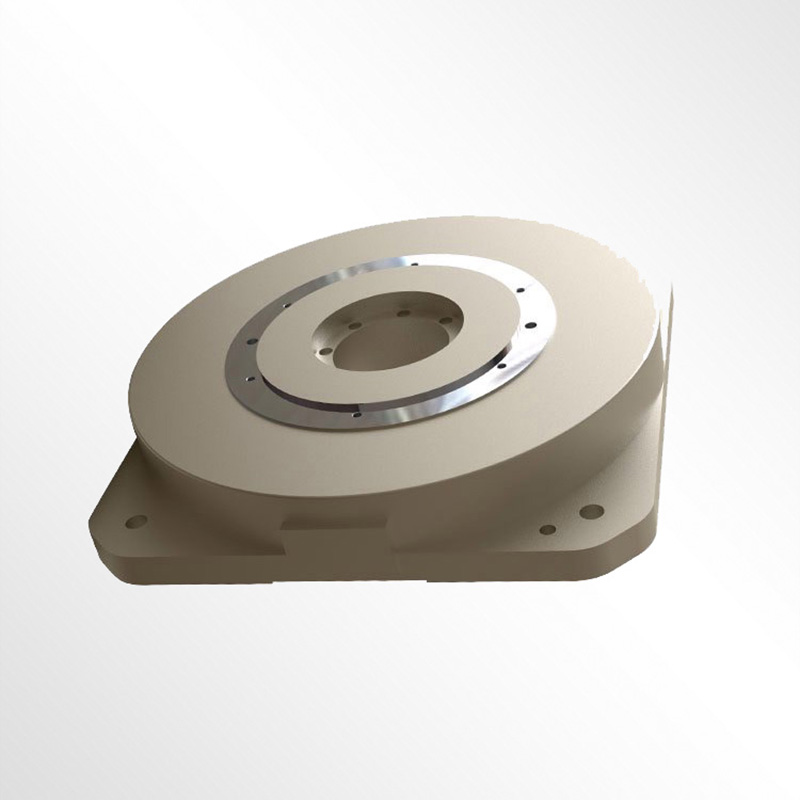
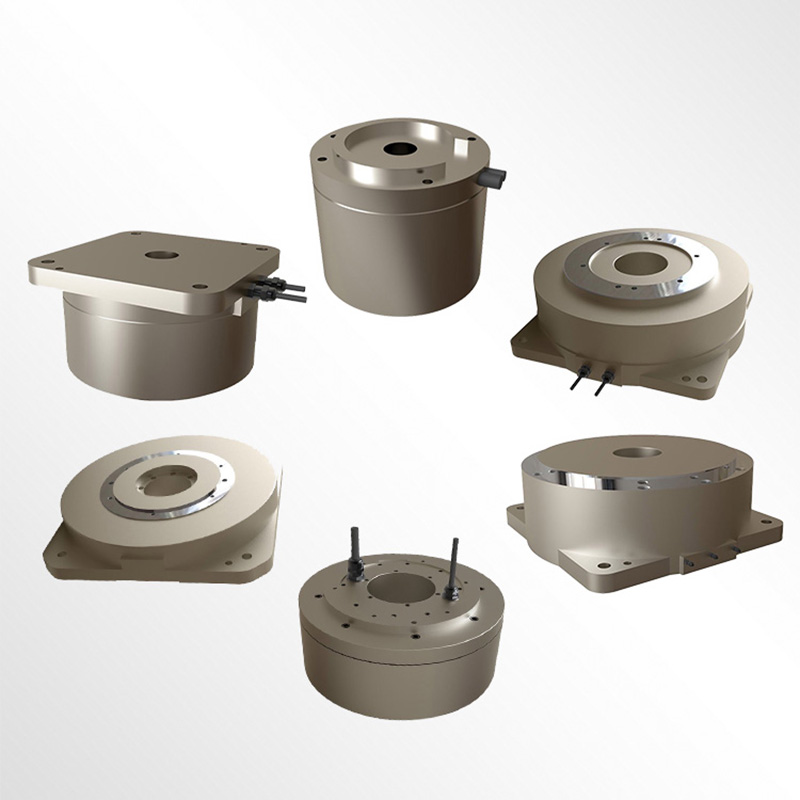
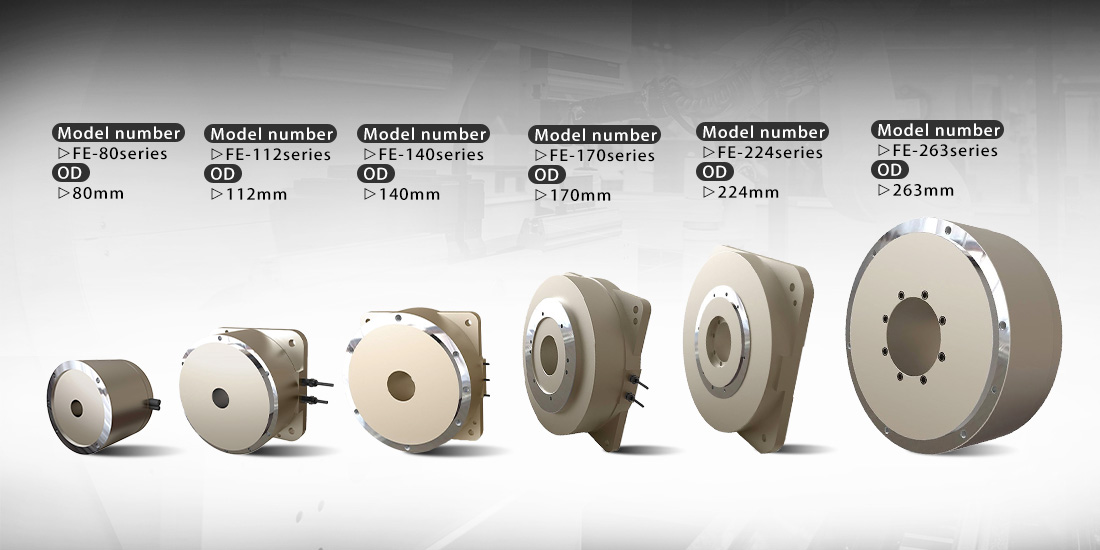
External rotor DD motor Torque motor FE series
Product parameters
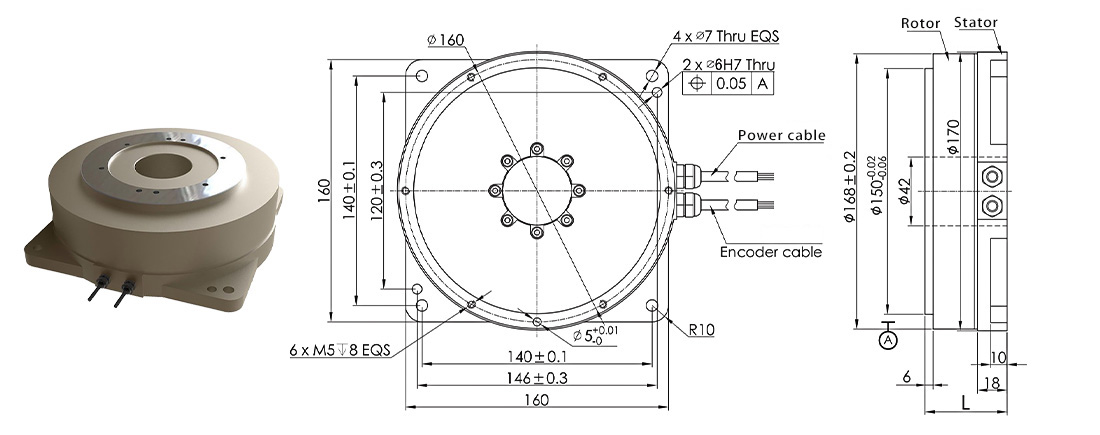
FE-80 series
DDmotor (External rotor)
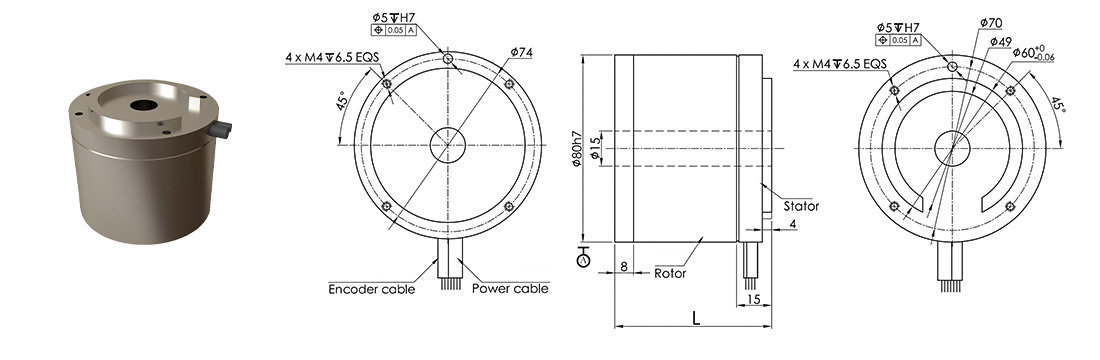
Main parameter | FE-8047 | FE-8067 |
Voltage (VDC) | 220 | 220 |
Rated torque (Nm) | 1 | 2 .5 |
Instantaneous maximum torque (Nm) | 3 .3 | 8 .3 |
Torque parameters (Nm/Arms) | 1 | 2 |
Rated current (Arms) | 1 .5 | 1 .5 |
Instantaneous Maximum current (Arms) | 5 | 5 |
Line resistance (Ω) | 3 .8 | 5 .5 |
Line inductance (mH) | 4 . 1 | 6 .2 |
Number of poles (2P) | 10 | 10 |
Back potential coefficient (V/Krpm) | 0 .25 | 0 .52 |
Rated output power (W) | 21 .0 | 52 .4 |
Rotor moment of inertia 10-4 kg.m ² | 3 .5 | 6 |
Rated speed (rpm) | 200 | 200 |
Maximum speed (rpm) | 360 | 360 |
Positioning accuracy (arc_sec) | ±32 | ±32 |
Repetition accuracy (arc_sec) | ±2 .5 | ±2 .5 |
Encoder resolution (sin/cos) | 8192 | 8192 |
Axial load (N) | 1000 | 1000 |
Radial load (N.m) | 10 | 10 |
Axial yaw (mm) | ≤0.01 | ≤0.01 |
Radial yaw (mm) | ≤0.01 | ≤0.01 |
Weight (kg) | 1 .7 | 2 .3 |
Motor height L (mm) | 47 | 67 |
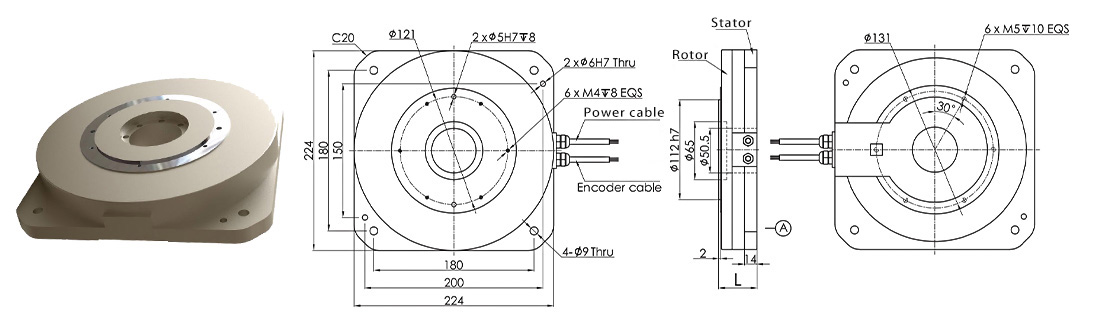
FE-112 series
DDmotor (External rotor)
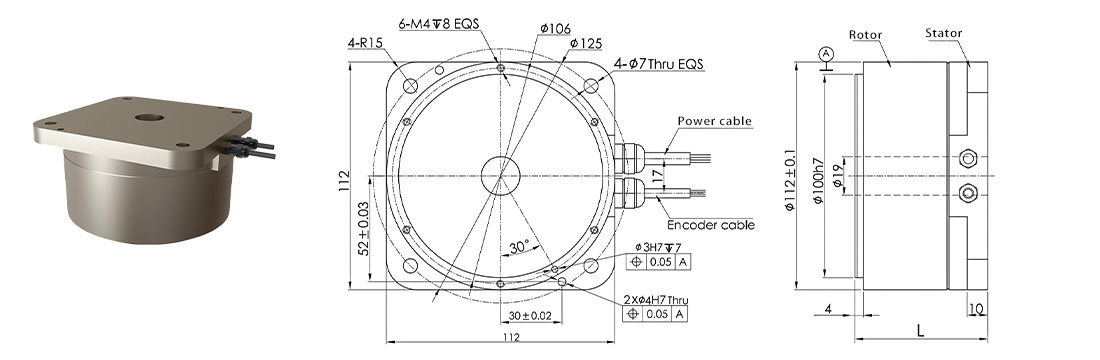
Main parameter | FE-11265 | FE-11295 |
Voltage (VDC) | 220 | 220 |
Rated torque (Nm) | 3 .0 | 8 .5 |
Instantaneous maximum torque (Nm) | 9 | 25 .5 |
Torque parameters (Nm/Arms) | 1 .2 | 3 .4 |
Rated current (Arms) | 2 .5 | 2 .5 |
Instantaneous Maximum current (Arms) | 7 .5 | 7 .5 |
Line resistance (Ω) | 2 .2 | 4 .6 |
Line inductance (mH) | 1 .8 | 4 .2 |
Number of poles (2P) | 14 | 14 |
Back potential coefficient (V/Krpm) | 1 .0 | 2 .8 |
Rated output power (W) | 62 .9 | 133 .6 |
Rotor moment of inertia 10-4 kg.m ² | 26 | 38 |
Rated speed (rpm) | 200 | 150 |
Maximum speed (rpm) | 350 | 250 |
Positioning accuracy (arc_sec) | ±20 | ±20 |
Repetition accuracy (arc_sec) | ± 1 .5 | ± 1 .5 |
Encoder resolution (sin/cos) | 8192 | 8192 |
Axial load (N) | 2500 | 2500 |
Radial load (N.m) | 20 | 20 |
Axial yaw (mm) | ≤0.005 | ≤0.005 |
Radial yaw (mm) | ≤0.005 | ≤0.005 |
Weight (kg) | 3 .2 | 4 .5 |
Motor height L (mm) | 65 | 95 |
FE-140 series
DDmotor (External rotor)
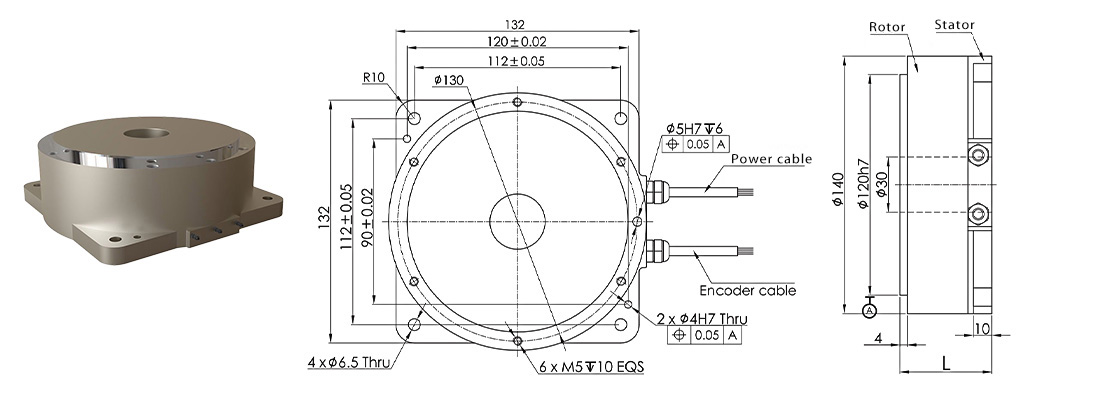
Main parameter | FE-14050 | FE-14080 |
Voltage (VDC) | 220 | 220 |
Rated torque (Nm) | 6 .0 | 10 .5 |
Instantaneous maximum torque (Nm) | 16 .8 | 28 |
Torque parameters (Nm/Arms) | 2 .4 | 4 .2 |
Rated current (Arms) | 2 .5 | 2 .5 |
Instantaneous Maximum current (Arms) | 7 | 7 |
Line resistance (Ω) | 3 .7 | 5 .9 |
Line inductance (mH) | 3 .8 | 6 |
Number of poles (2P) | 14 | 14 |
Back potential coefficient (V/Krpm) | 2 .0 | 3 .4 |
Rated output power (W) | 188 .6 | 220 . 1 |
Rotor moment of inertia 10-4 kg.m ² | 45 | 76 |
Rated speed (rpm) | 300 | 200 |
Maximum speed (rpm) | 600 | 350 |
Positioning accuracy (arc_sec) | ±20 | ±20 |
Repetition accuracy (arc_sec) | ± 1 .5 | ± 1 .5 |
Encoder resolution (sin/cos) | 8192 | 8192 |
Axial load (N) | 2500 | 2500 |
Radial load (N.m) | 20 | 20 |
Axial yaw (mm) | ≤0.005 | ≤0.005 |
Radial yaw (mm) | ≤0.005 | ≤0.005 |
Weight (kg) | 3 .4 | 5 .6 |
Motor height L (mm) | 50 | 80 |
FE-170 series
DDmotor (External rotor)
Main parameter | FE-17050 | FE-17065 | FE-17095 | FE-170125 | FE-170155 |
Voltage (VDC) | 220 | 220 | 220 | 220 | 220 |
Rated torque (Nm) | 4 .5 | 9 | 23 .8 | 41 .8 | 59 .5 |
Instantaneous maximum torque (Nm) | 14 .0 | 30 | 71 | 125 | 179 |
Torque parameters (Nm/Arms) | 3 .4 | 6 | 9 .5 | 16 .7 | 23 .8 |
Rated current (Arms) | 1 .4 | 1 .5 | 2 .5 | 2 .5 | 2 .5 |
Instantaneous Maximum current (Arms) | 4 .2 | 5 | 7 .5 | 7 .5 | 7 .5 |
Line resistance (Ω) | 5 .0 | 10 | 9 .4 | 14 .4 | 20 .0 |
Line inductance (mH) | 7 .6 | 29 | 17 .9 | 34 .7 | 45 |
Number of poles (2P) | 15 | 19 | 15 | 15 | 15 |
Back potential coefficient (V/Krpm) | 2 .8 | 4 | 7 .8 | 13 .6 | 19 .4 |
Rated output power (W) | 1 17 .9 | 141 .5 | 249 .4 | 328 .5 | 374 . 1 |
Rotor moment of inertia 10-4 kg.m ² | 68 | 76 | 230 | 320 | 410 |
Rated speed (rpm) | 250 | 150 | 100 | 75 | 60 |
Maximum speed (rpm) | 450 | 240 | 190 | 150 | 120 |
Positioning accuracy (arc_sec) | ±20 | ±20 | ±20 | ±20 | ±20 |
Repetition accuracy (arc_sec) | ± 1 .5 | ± 1 .5 | ± 1 .5 | ± 1 .5 | ± 1 .5 |
Encoder resolution (sin/cos) | 1 1740 | 1 1740 | 1 1740 | 1 1740 | 1 1740 |
Axial load (N) | 4000 | 10000 | 15000 | 15000 | 15000 |
Radial load (N.m) | 40 | 150 | 200 | 200 | 200 |
Axial yaw (mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 |
Radial yaw (mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 |
Weight (kg) | 3 .9 | 5 .6 | 10 . 1 | 13 .9 | 18 . 1 |
Motor height L (mm) | 50 | 65 | 95 | 125 | 155 |
FE-224 series
DDmotor (External rotor)
Main parameter | FE-22442 | FE-22462 |
Voltage (VDC) | 220 | 220 |
Rated torque (Nm) | 14 . 1 | 35 .0 |
Instantaneous maximum torque (Nm) | 42 .2 | 105 |
Torque parameters (Nm/Arms) | 6 .4 | 15 .7 |
Rated current (Arms) | 2 .2 | 2 .2 |
Instantaneous Maximum current (Arms) | 6 .6 | 6 .6 |
Line resistance (Ω) | 7 .5 | 13 .8 |
Line inductance (mH) | 17 . 1 | 40 |
Number of poles (2P) | 20 | 20 |
Back potential coefficient (V/Krpm) | 5 .2 | 12 .8 |
Rated output power (W) | 295 .5 | 366 .8 |
Rotor moment of inertia 10-4 kg.m ² | 120 | 300 |
Rated speed (rpm) | 200 | 100 |
Maximum speed (rpm) | 380 | 200 |
Positioning accuracy (arc_sec) | ±20 | ±20 |
Repetition accuracy (arc_sec) | ± 1 .5 | ± 1 .5 |
Encoder resolution (sin/cos) | 1 1740 | 16384 |
Axial load (N) | 10000 | 10000 |
Radial load (N.m) | 120 | 120 |
Axial yaw (mm) | ≤0.005 | ≤0.005 |
Radial yaw (mm) | ≤0.005 | ≤0.005 |
Weight (kg) | 5 .5 | 9 .2 |
Motor height L (mm) | 42 | 62 |
FE-263 series
DDmotor (External rotor)
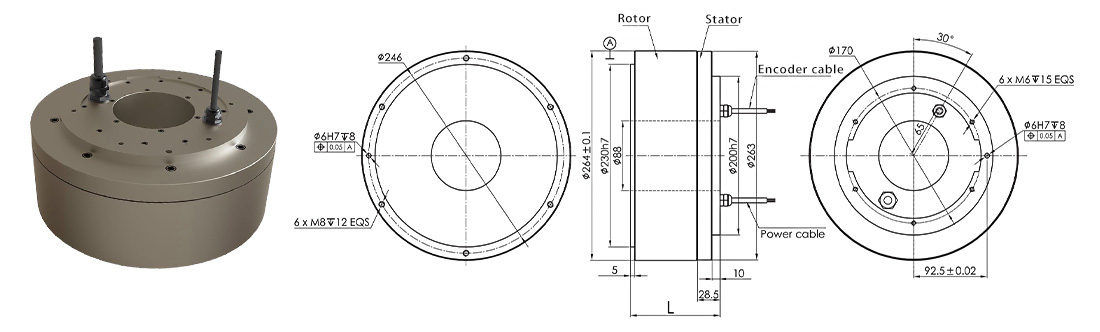
Main parameter | FE-263113 | FE-263138 | FE-263163 | FE-263188 |
Voltage (VDC) | 220 | 220 | 220 | 220 |
Rated torque (Nm) | 95 .0 | 150 .0 | 210 | 250 .0 |
Instantaneous maximum torque (Nm) | 190 | 300 | 420 | 500 |
Torque parameters (Nm/Arms) | 13 .4 | 21 .9 | 29 .6 | 35 .2 |
Rated current (Arms) | 7 . 1 | 7 . 1 | 7 . 1 | 7 . 1 |
Instantaneous Maximum current (Arms) | 14 .2 | 14 .2 | 14 .2 | 14 .2 |
Line resistance (Ω) | 2 .7 | 3 .9 | 2 | 6 .7 |
Line inductance (mH) | 8 .3 | 13 .4 | 7 | 22 .8 |
Number of poles (2P) | 20 | 20 | 23 | 20 |
Back potential coefficient (V/Krpm) | 10 .9 | 17 .9 | 10 . 1 | 28 .7 |
Rated output power (W) | 796 .5 | 943 .2 | 1760 .6 | 1310 .0 |
Rotor moment of inertia 10-4 kg.m ² | 1000 | 1500 | 1600 | 2100 |
Rated speed (rpm) | 80 | 60 | 80 | 50 |
Maximum speed (rpm) | 150 | 120 | 150 | 100 |
Positioning accuracy (arc_sec) | ±20 | ±20 | ±20 | ±20 |
Repetition accuracy (arc_sec) | ± 1 .5 | ± 1 .5 | ± 1 .5 | ± 1 .5 |
Encoder resolution (sin/cos) | 16384 | 16384 | 16384 | 16384 |
Axial load (N) | 40000 | 40000 | 40000 | 40000 |
Radial load (N.m) | 400 | 400 | 400 | 400 |
Axial yaw (mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 |
Radial yaw (mm) | ≤0.005 | ≤0.005 | ≤0.005 | ≤0.005 |
Weight (kg) | 24 .4 | 32 .5 | 44 | 49 . 1 |
Motor height L (mm) | 1 13 | 138 | 163 | 188 |
Application
Direct drive torque motor (frameless motor and DD motor), is a large torque, high positioning accuracy, high rigidity of the direct drive motor, suitable for use in various industries of machinery, especially robot, semiconductor manufacturing, electrode manufacturing, CNC lathes and other equipment has a very wide range of use.
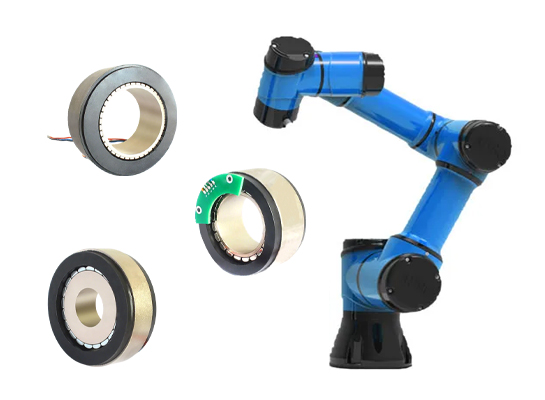
Frameless motor is applied to direct joint drive of cooperative robot
Direct drive frameless torque motor is applied to medical surgical robot

Direct drive torque motor is used to drive the photoelectric turntable

Frameless torque motor is applied to exoskeleton robot
Service
Dedicated service, along the way
Warranty worry-free, extended repair, often return to promote optimization, peace of mind choice, all in control.

Before the purchase of professional consultants rapid response, accurate recommendation products;

Purchase logistics is efficient, specially-assigned to ensure delivery;

After purchase 7×24 hours customer service answer questions, engineers at any time to save the "machine"
After-sale guarantee
After-sales service: We provide comprehensive after-sales technical support, if you encounter any problems in the process of use, the professional after-sales engineer team will respond quickly, through telephone, mail or remote assistance, to provide you with detailed solutions. We also provide regular return visits to our products to understand how they are used and to collect your feedback in order to continuously optimize our products and services. In addition, in strict accordance with the quality assurance policy, we provide free repair or replacement services for products with quality problems during the warranty period, so that you have no worries.