
Product Description
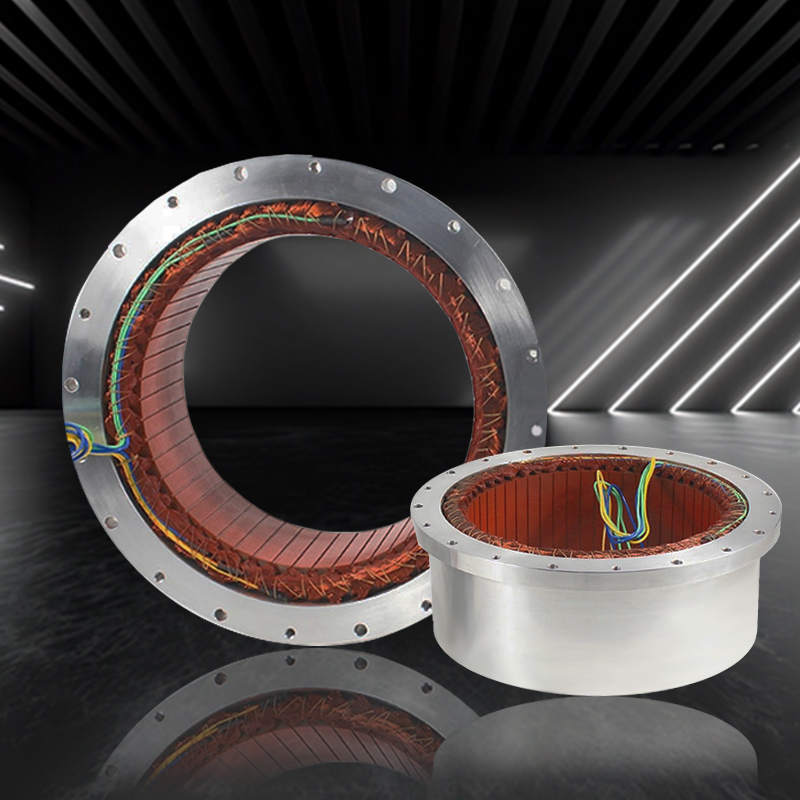
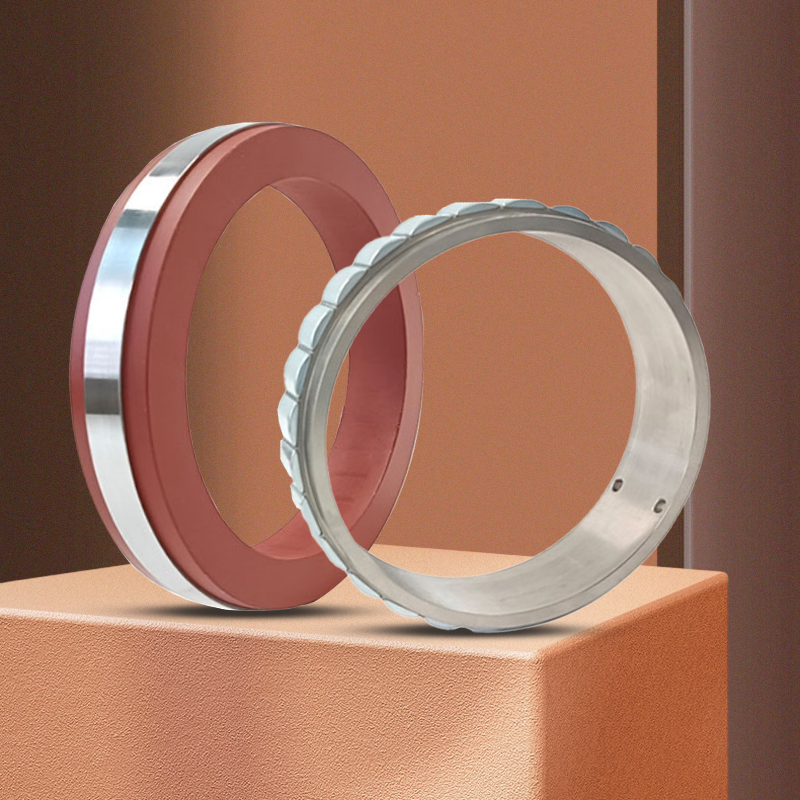
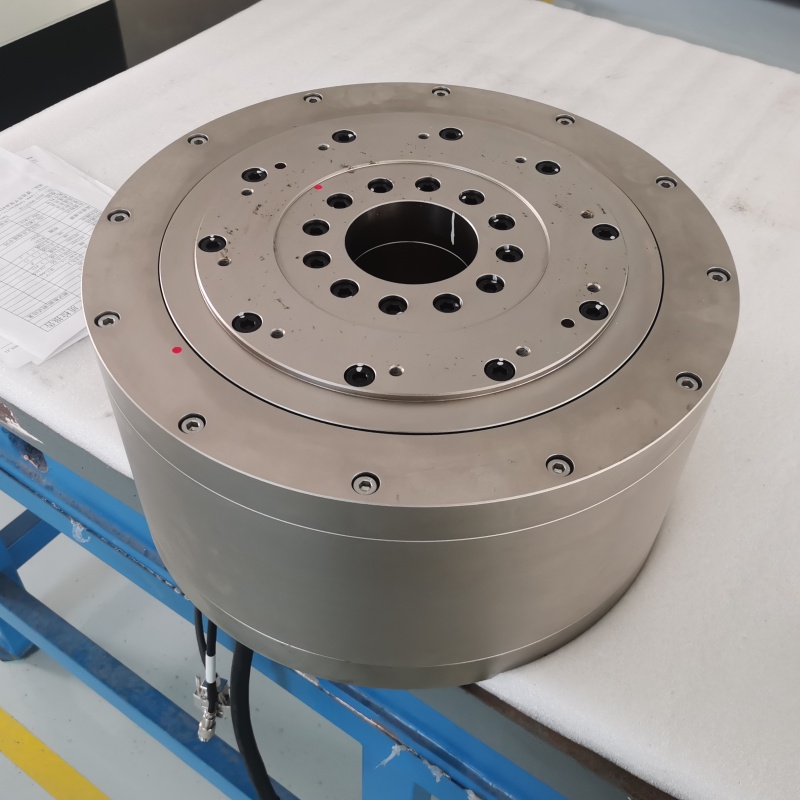
The frameless inner rotor motor is an innovative model of the motor family. It abandons the traditional shell, puts the rotor inside, and has a compact structure and small size. This design provides a significant increase in power density, efficient and responsive operation. With the excellent performance of high precision and low noise, we show our skills in the fields of precision instruments and automated production lines.



Functional Features
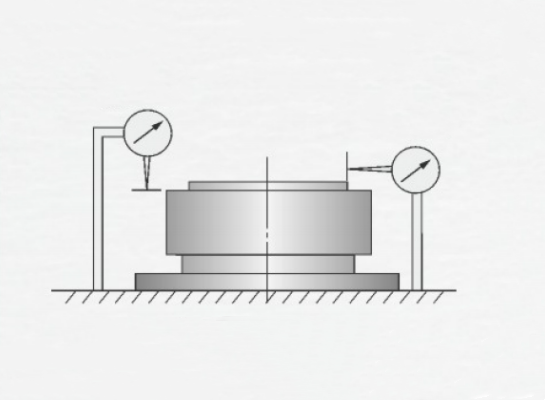
The frameless motor has a built-in high-performance absolute encoder, which enables precise absolute positioning with advanced sensing technology, and axial and radial runout control to a minuscule 2 microns. The positioning accuracy of the station is matched with the height, and the direct installation is adopted, the gear transmission is abandoned, the energy loss is eliminated, and the energy saving effect is remarkable.

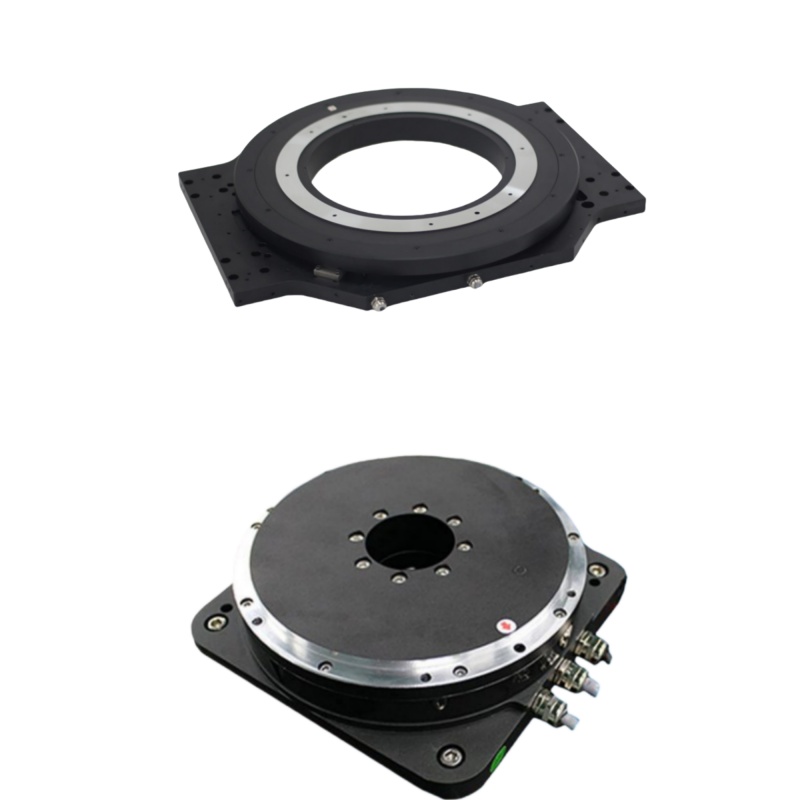
Application
Frameless inner rotor motor is widely used. In the field of robotics, it is used for joint drive to make the robot action more flexible and accurate; In medical equipment, help surgical robots and imaging equipment to achieve high-precision control; Industrial automation, suitable for high-precision machine tools, semiconductor equipment; In aerospace, it can be used for flight control steering gear, etc., to meet lightweight and high-performance needs.



Product parameters
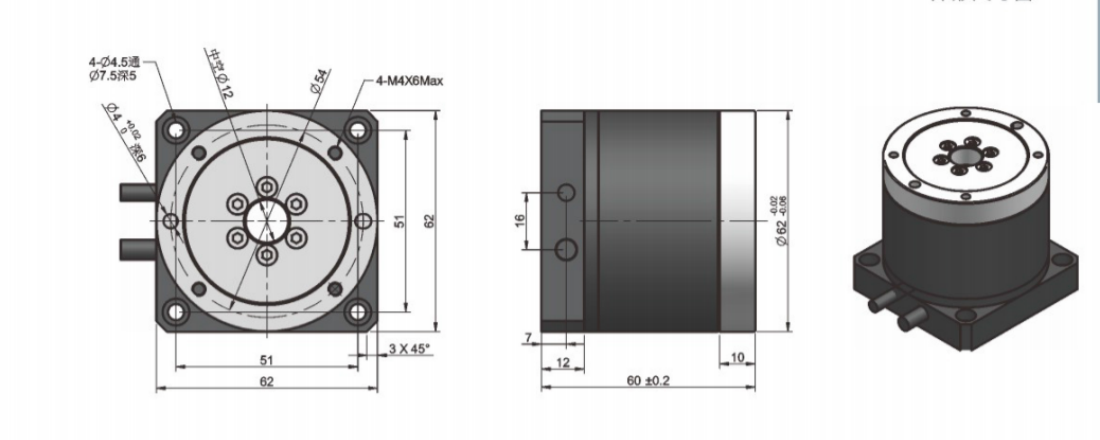
Main parameters | Unit | RDI-062060-W1-FA | RDI-080050-W2-FA | RDI-080067-W1-FA | RDI-100035-W1-FA | RDI-120050-W1-FA | RDI-140129-W2-FA | RDI-140189-W2-FA | RDI-170050-W1-FA | RDI-170075-W1-FA |
Continuous torque | N.m | 0.3 | 0.6 | 1 | 0.6 | 3.5 | 18 | 40 | 40 | 16.8 |
Continuous current | A rms | 1.6 | 3.2 | 3.2 | 3.2 | 1.5 | 5 | 5 | 5 | 3.5 |
Maximum torque | N.m | 1 | 1.9 | 3 | 1.9 | 10.5 | 47 | 104 | 104 | 50 |
Maximum current | Arms | 4.8 | 9.6 | 9.6 | 9.6 | 4.5 | 13 | 13 | 13 | 10.5 |
Torque constant | Nm/Arms | 0.2 | 0.2 | 0.31 | 0.2 | 2.33 | 3.6 | 8 | 8 | 4.8 |
Resistance (ptp) | Ohms(25° C) | 5.3 | 1.2 | 1.5 | 1.2 | 2.2 | 53 | 15.8 | 15.8 | 11.7 |
Inductance (ptp) | mH(25° C) | 2.4 | 1 | 1.S | 1 | 1.8 | 93 | 21.9 | 21.9 | 16.3 |
Number of poles | / | 14 | 10 | 10 | 10 | 20 | 30 | 30 | 30 | 32 |
Back EMF constant (ptp) | Vrims/rad/s | 0.2 | 0.2 | 0.26 | 0.2 | 1.9 | 2.9 | 6.5 | 6.5 | 3.9 |
Maximum rated power consumption | W(25° C) | 25.9 | 23.5 | 29.3 | 23.5 | 9.5 | 253 | 754.3 | 754.3 | 273.7 |
Motor constant | Nm/ √ W | 0.1 | 0.1 | 0.21 | 0.1 | 1.1 | 1.1 | 1.5 | 1.5 | 1 |
Moment of inertia | Kg.m² | 6.5*10~5 | 1.5*10-4 | 2.2*10~ ⁴ | 1.5*10 | 0.0016 | 0.0027 | 0.0043 | 0.0043 | 0.004 |
Motor weight | Kg | 0.65 | 1.2 | 1.6 | 1.2 | 2.3 | 7.3 | 10.8 | 10.8 | 5.2 |
Maximum speed | rpm | 600 | 600 | 45d | 600 | 350 | 250 | 250 | 250 | 500 |
Positioning accuracy | Arc sec | ±30 | ±50 | ±50 | ±50 | ±20 | ±20 | ±20 | ±20 | ±20 |
Repeat accuracy | Arc Sec | ±2.5 | ±2.5 | ±2.5 | ±2.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 |
Resolution | sin/cos | 5000 | 5000 | 20 | 5000 | 11740 | 11740 | 11740 | 11740 | 11740 |
Maximum axial load | N | 50 | 50 | 50 | 50 | 500 | 5000 | 5000 | 5000 | 2500 |
Maximum radial load | N.m | / | / | / | / | 10 | 50 | 50 | 50 | 20 |
Axial runout | mm | 0.03 | 0.03 | 0.03 | 0.03 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 |
Radial runout | mm | 0.03 | 0.03 | 0.03 | 0.03 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 |
Motor height | mm | 60 | 50 | 67 | 35 | 50 | 125 | 185 | 50 | 75 |
RDI-062060-W1-FA
RDI-080050-W2-FA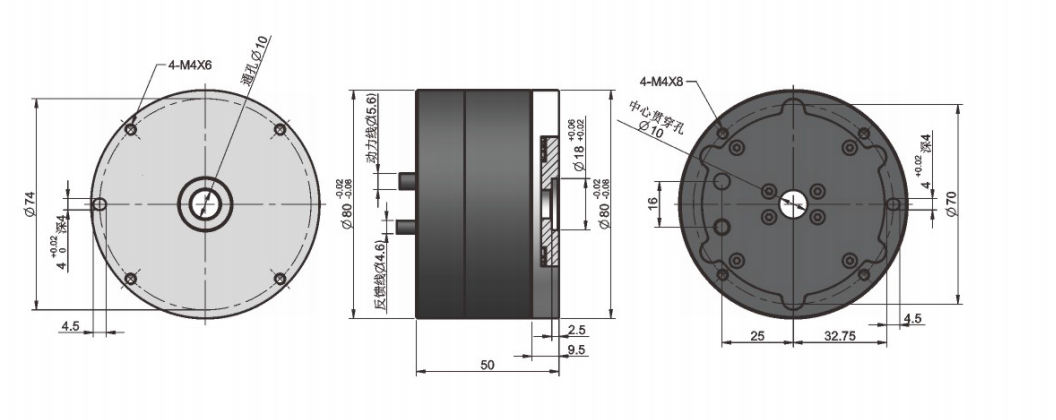
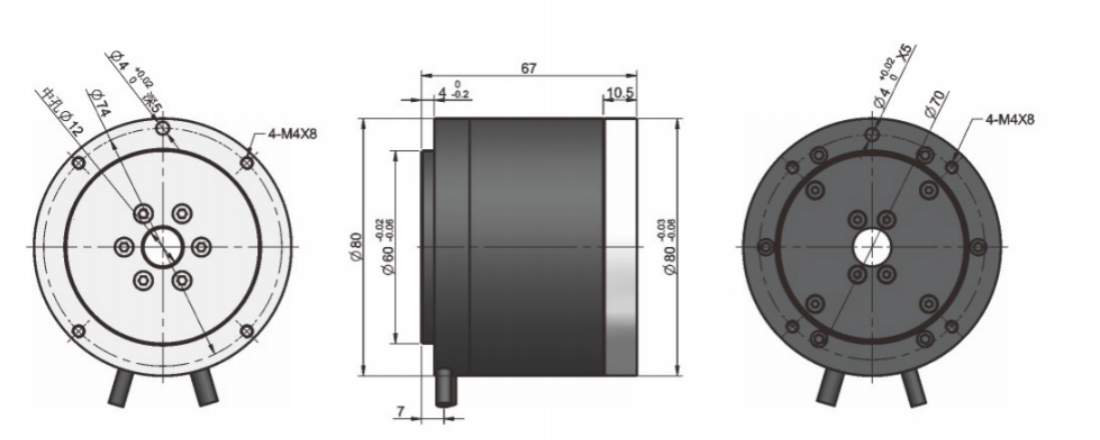
RDI-080067-W1-FA
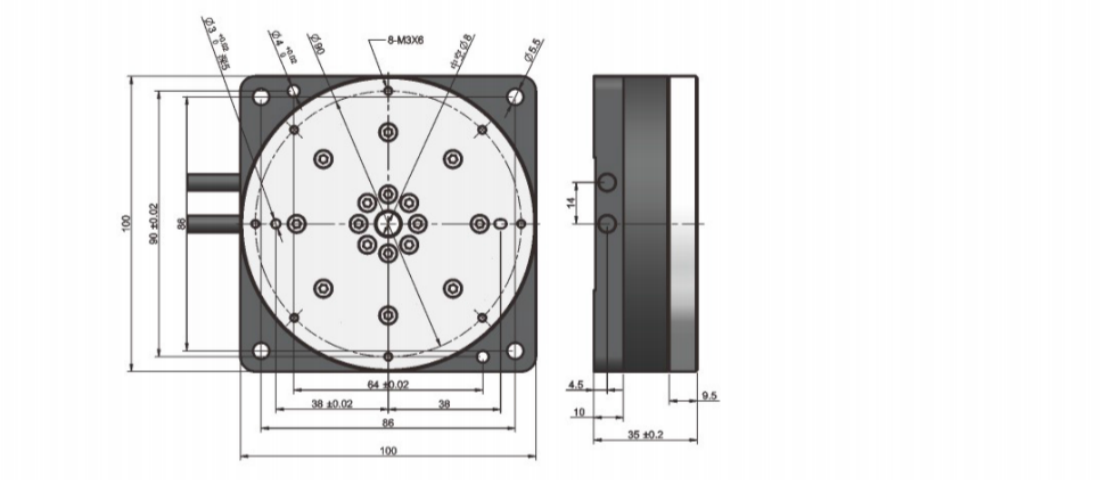
RDI-100035-W1-FA
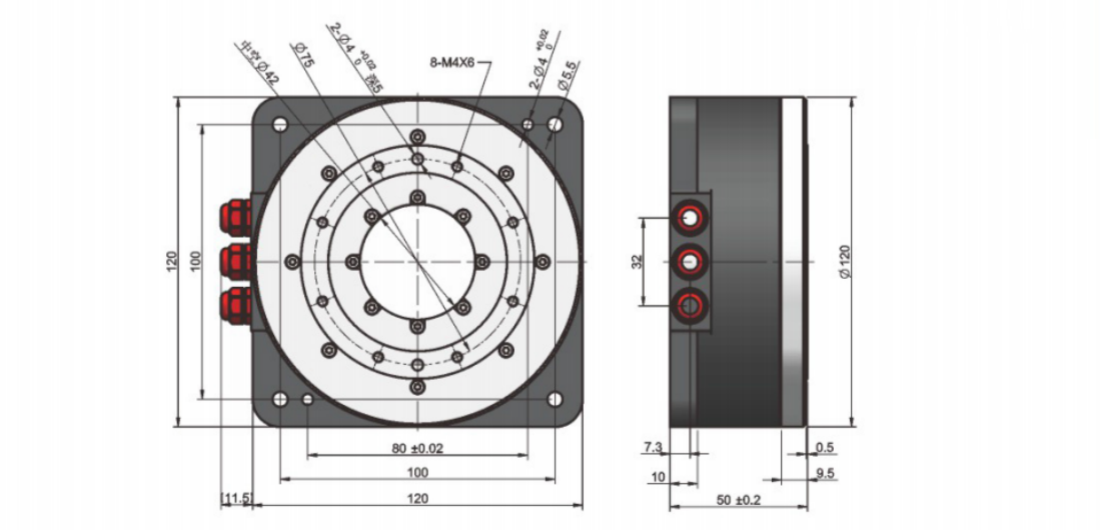
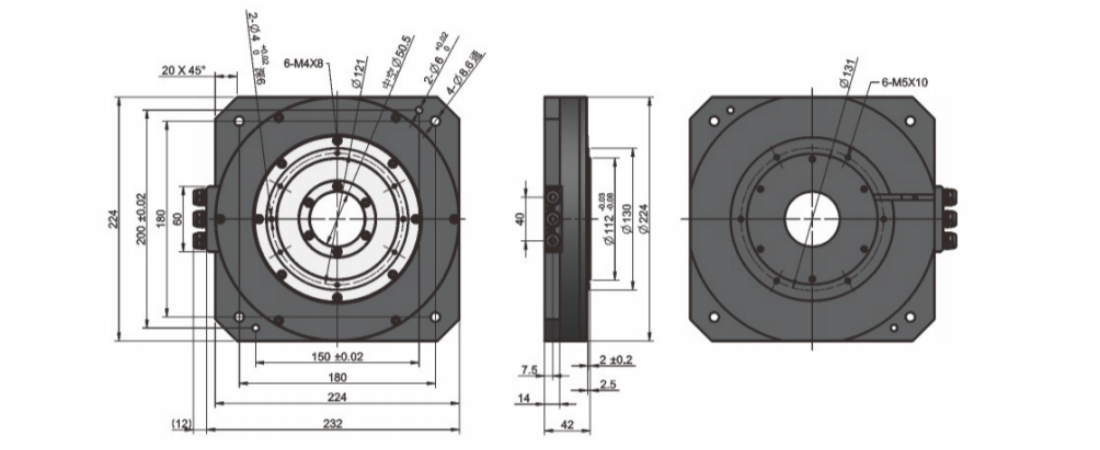
RDI-120050-W1-FA
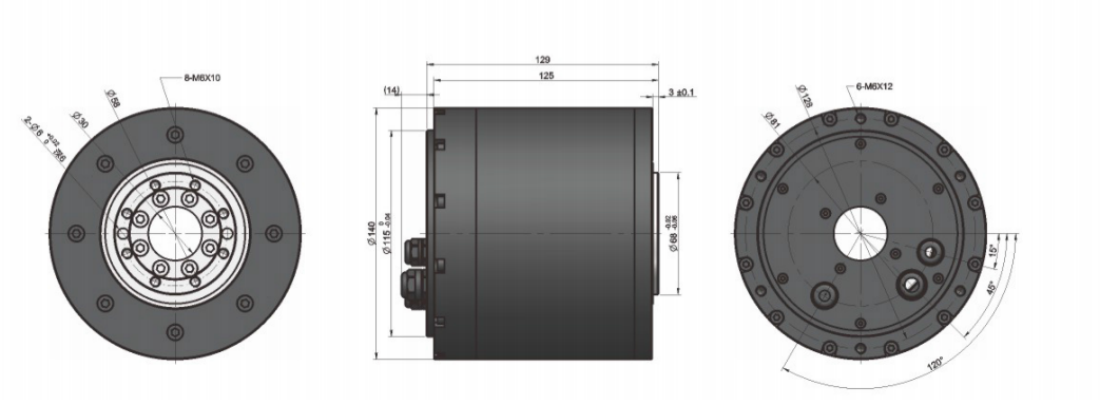
RDI-140129/140189-W2-FA
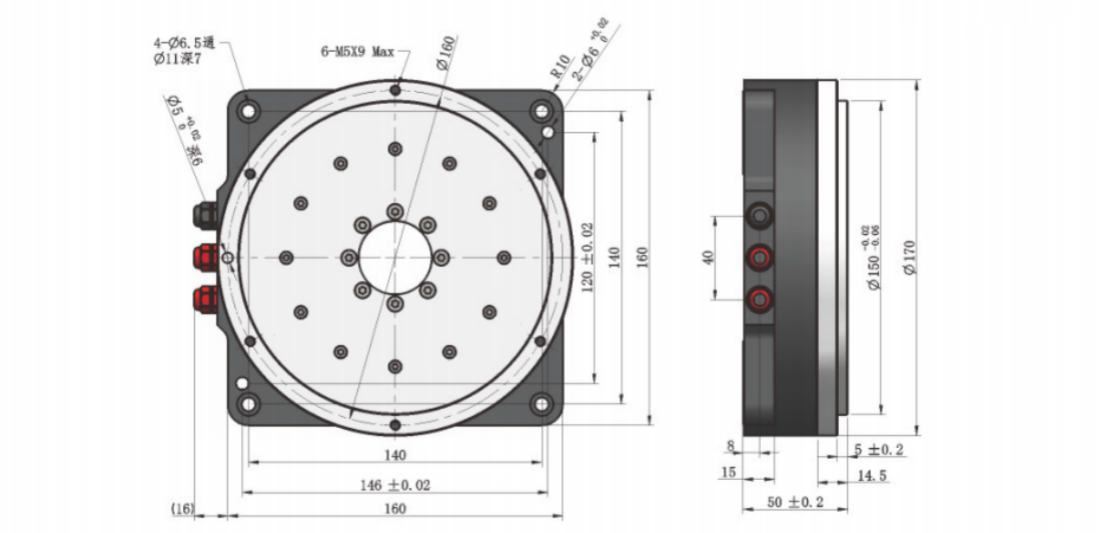
RDI-170050-W1-FA
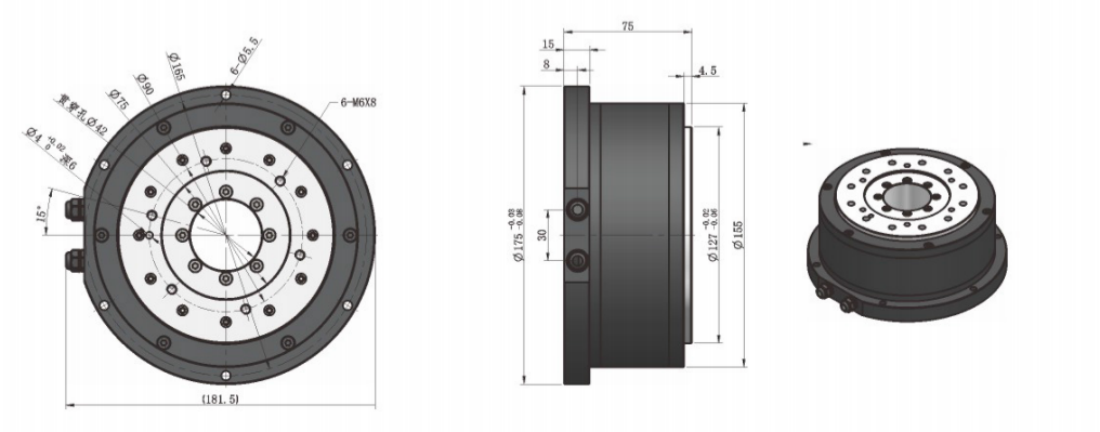
RDI-170075-W1-FA
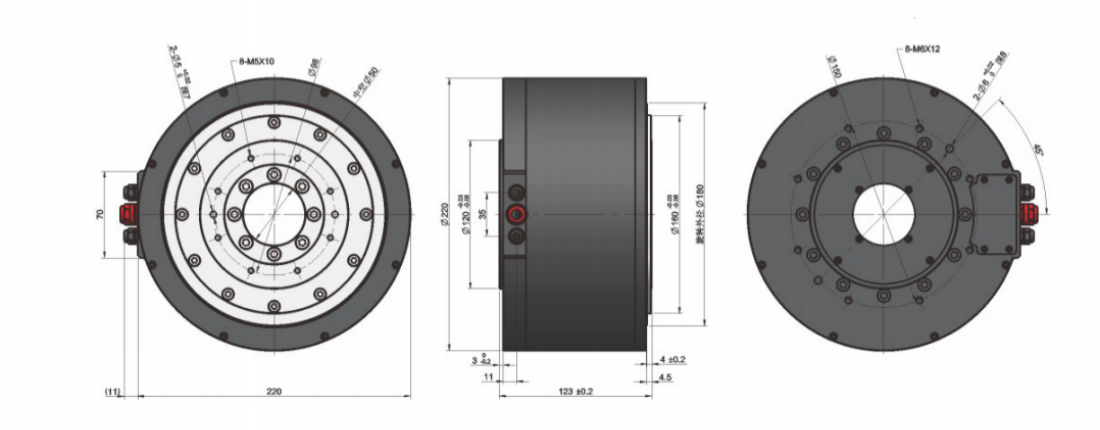
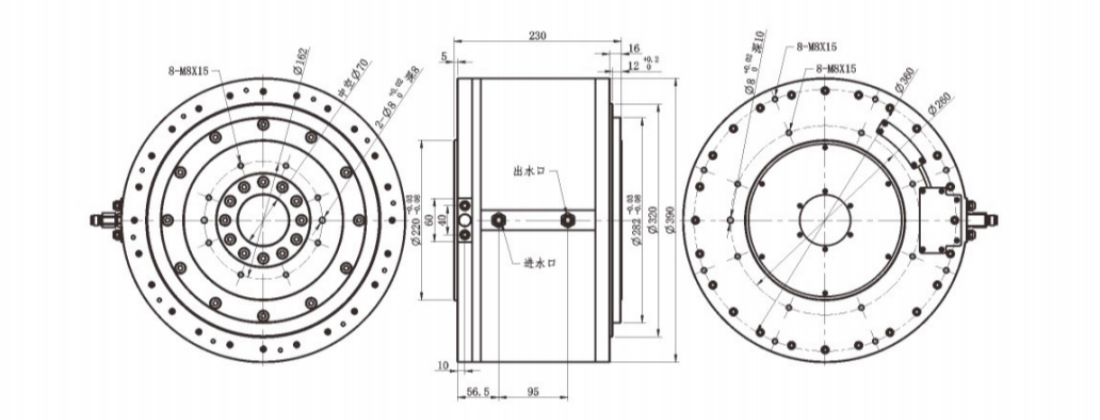
Main parameters | Unit | RDI-180055-W1-FA | RDI-180095-W1-FA | RDI-180125-W1-FA | RDI-224042-W1-FA | RDI-220123-W1-FA | RDI-220168-W1-FA | RDI-220208-W1-FA | RDI-380230-W1-FL-M1-C1 |
Continuous torque | N.m | 14 | 25.2 | 40.1 | 50.6 | 87.4 | 115 | 600 | |
Continuous current | A rms | 4.5 | 4.5 | 4.5 | 2.3 | 5.5 | 11.5 | 5.75 | 32 |
Maximum torque | N.m | 42 | 76 | 120 | 30 | 152 | 266 | 350 | 1406 |
Maximum current | Arms | 13.5 | 13.5 | 13.5 | 7 | 16.5 | 35 | 17.5 | 75 |
Torque constant | Nm/Arms | 3.1 | 5.6 | 8.9 | 4.3 | 9.2 | 7.6 | 20 | 18.75 |
Resistance (ptp) | Ohms(25° C) | 2.4 | 4.1 | 6.4 | 22.5 | 3.2 | 2.6 | 5.2 | 1.1 |
Inductance (ptp) | mH(25° C) | 7.6 | 14 | 20 | 12 | 10.5 | 8.4 | 16.8 | 3.5 |
Number of poles | / | 32 | 32 | 32 | 40 | 40 | 40 | 40 | 60 |
Back EMF constant (ptp) | Vrims/rad/s | 2.5 | 4.6 | 7.3 | 3.5 | 8.3 | 6.3 | 6.3 | 15.3 |
Maximum rated power consumption | W(25° C) | 92.8 | 158.5 | 247.5 | 227.3 | 184.8 | 656.6 | 328.3 | 2150.9 |
Motor constant | Nm/ √ W | 1.4 | 2 | 2.5 | 0.7 | 3.7 | 3.4 | 6.3 | 12.9 |
Moment of inertia | Kg.m² | 0.0039 | 0.008 | 0.01 | 0.0072 | 0.034 | 0.036 | 0.058 | 0.53 |
Motor weight | Kg | 5.4 | 10.3 | 13 | 6.2 | 22.7 | 24.7 | 34.8 | 81 |
Maximum speed | rpm | 250 | 300 | 250 | 250 | 200 | 250 | 200 | 150 |
Positioning accuracy | Arc sec | ±20 | ±20 | ±20 | ±20 | ±20 | ±20 | ±20 | 士 25 |
Repeat accuracy | Arc Sec | ±1.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 | ±1.5 |
Resolution | sin/cos | 11740 | 11740 | 11740 | 11740 | 11740 | 11740 | 11740 | 15744 |
Maximum axial load | N | 2500 | 4000 | 2500 | 2500 | 8000 | 8000 | 8000 | 15000 |
Maximum radial load | N.m | 20 | 40 | 20 | 20 | 80 | 80 | 80 | 300 |
Axial runout | mm | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 |
Radial runout | mm | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 | 0.005 |
Motor height | mm | 55 | 95 | 125 | 42 | 123 | 168 | 208 | 230 |
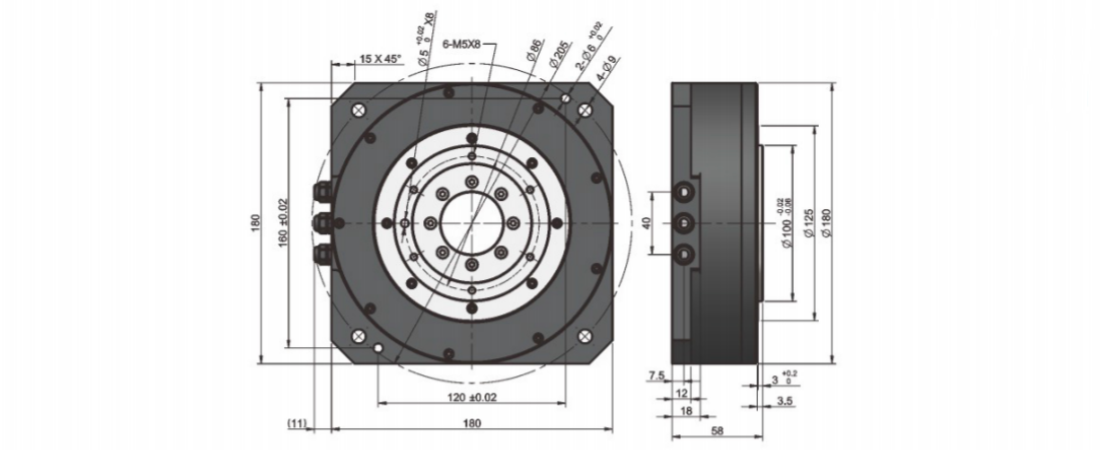
RDI-180055/180095/1800125-W1-FA
RDI-224042-W1-FA
RDI-220123/220168/220208-W1-FA
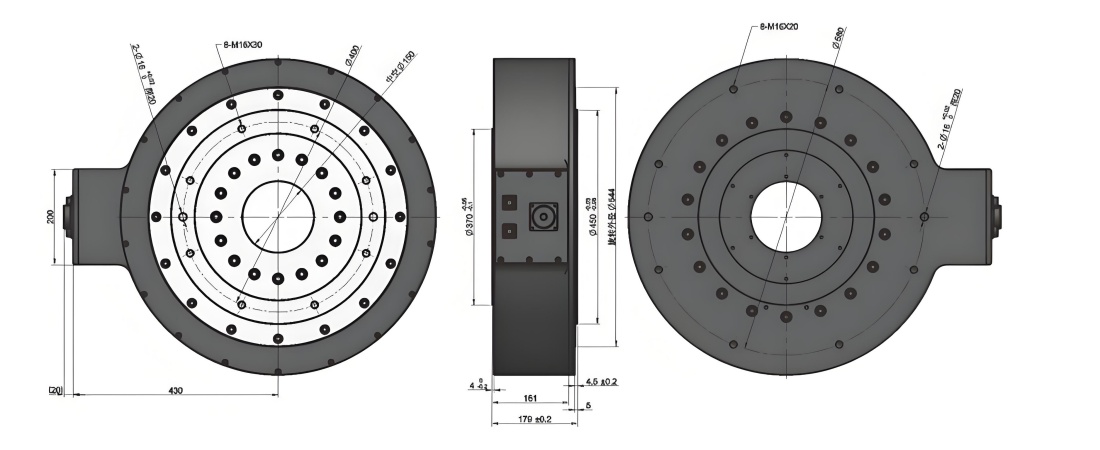
RDI-380230-W1-FL-M1-C1
Main parameters | Unit | RDI-408077-W1-FA | RDI-408102-W1-FA | RDI-408165-W1-FA | RDI-390245-W1-FL | RDI-660180-W1-FL | RDI-660230-W1-FL |
Continuous torque | N.m | 150.9 | 270 | 500.5 | 280 | 1300 | 1950.C |
Continuous current | A rms | 4.3 | 6 | 8.6 | 5 | 32 | 32 |
Maximum torque | N.m | 463.3 | 675 | 1501.6 | 1400 | 2500 | 3600 |
Maximum current | Arms | 13.2 | 15 | 25.8 | 25 | 64 | 64 |
Torque constant | Nm/Arms | 35.1 | 45 | 58.2 | 56 | 41 | 41 |
Back EMF constant (ptp) | Vrims/rad/s | 28.7 | 36.7 | 47.5 | 45.7 | 33.5 | 33.5 |
Motor constant | Nm/ √ W | 17.6 | 17.6 | 17.6 | 22.3 | 17.6 | 17.6 |
Moment of inertia | Kg.m² | 0.18 | 0.25 | 0.43 | 0.7 | 3.5 | 4.7 |
Motor weight | Kg | 33.2 | 44.7 | 73.5 | 138 | 245 | 328 |
Maximum speed | rpm | 120 | 80 | 60 | 50 | 60 | 60 |
Positioning accuracy | Arc sec | ±20 | ±15 | ±15 | ±30 | ±30 | ±30 |
Repeat accuracy | Arc Sec | ±1.5 | 1.5 | 1.5 | ±1.5 | 2.5 | ±2.5 |
Resolution | sin/cos | 16384 | 16384 | 16384 | 15744 | 31488 | 31488 |
Maximum axial load | N | 40000 | 40000 | 15 | 50 | 100 | 100 |
Maximum radial load | N.m | 400 | 400 | 500 | 2000 | 5000 | 5000 |
Axial runout | mm | 0.008 | 0.008 | 0.008 | 0.03/0.005 | 0.02 | 0.02 |
Radial runout | mm | 0.008 | 0.008 | 0.008 | 0.03/0.005 | mm | mm |
Motor height | mm | 77 | 102 | 165 | 245 | 180 | 230 |
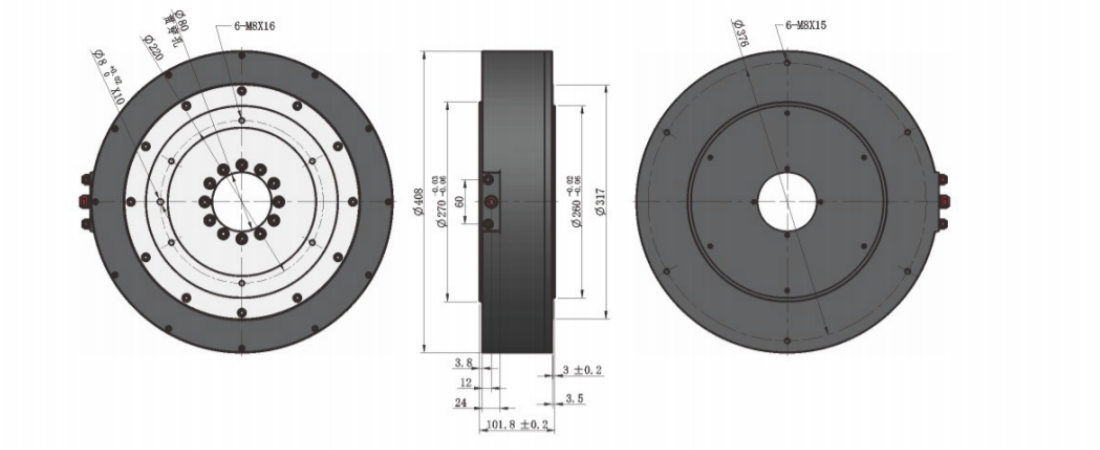
RDI-408077-W1-FA
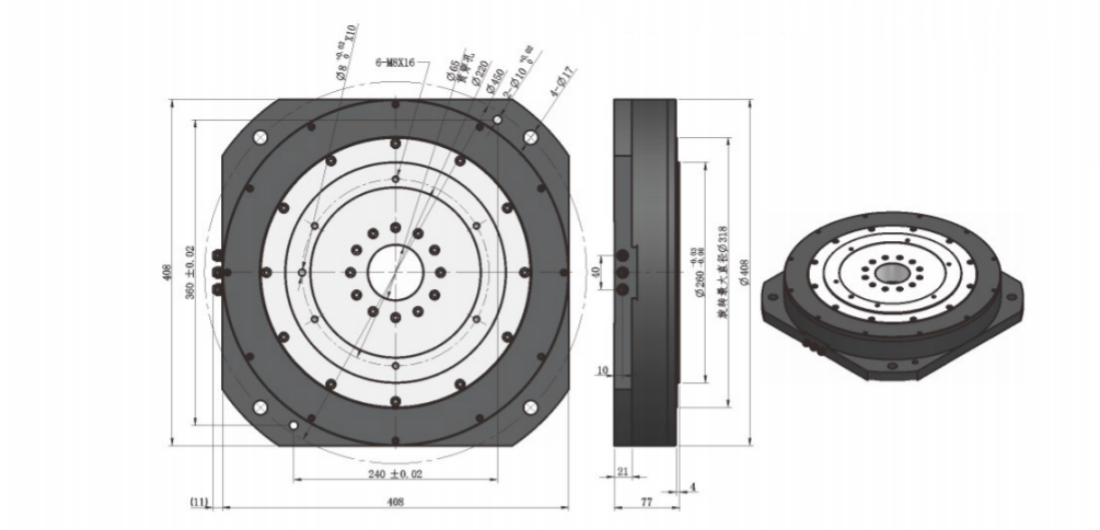
RDI-408102/408165-W1-FA
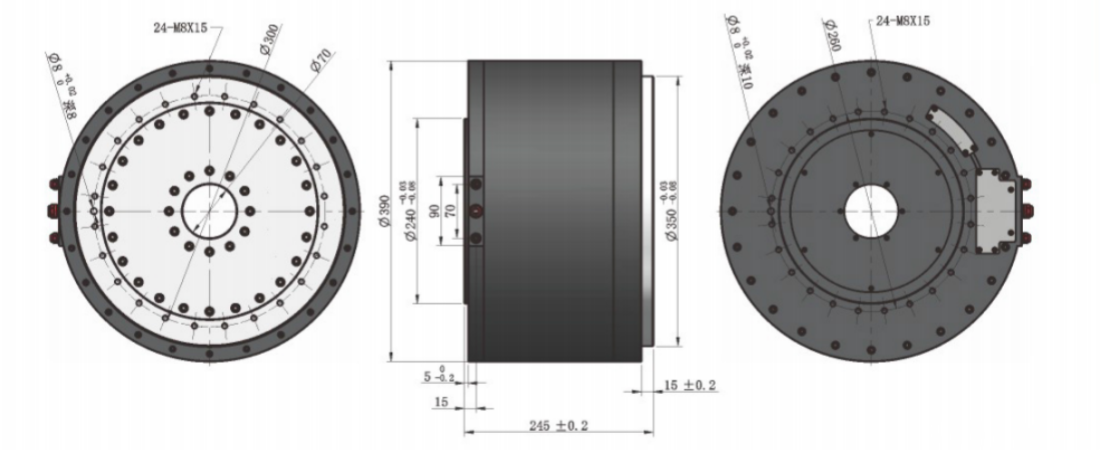
RDI-390245-W1-FL
RDI-660180/660230-W1-FL