





产品描述
该系列为最新款,多种可选型号:EXY 2-7,EXY 4-10,EXY 4-36,EXY 6-60,EXY 8-120,EXY 12-320,EXY 15-450;额定扭矩范围:2.5N.m~145N.m。中空设计,双编码器,高转速;大扭矩密度。适用于机械臂/人形机器人/外骨骼机器人/四足机器人等。
1. 标准品电机不支持抱闸,如需可定制抱闸.
2. 标准品电机不支防水,如需可定制品IP54.
3. 标准品电机支持CAN BUS和EARTHE CAT.



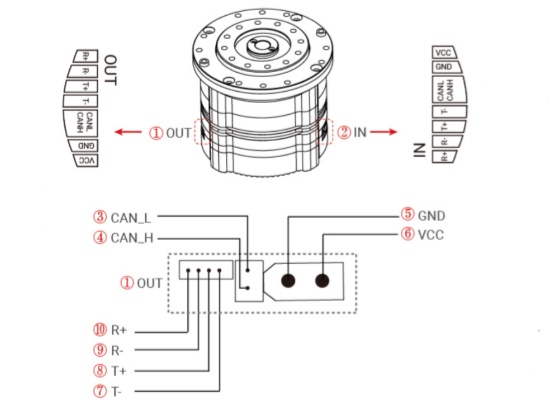
接口信息
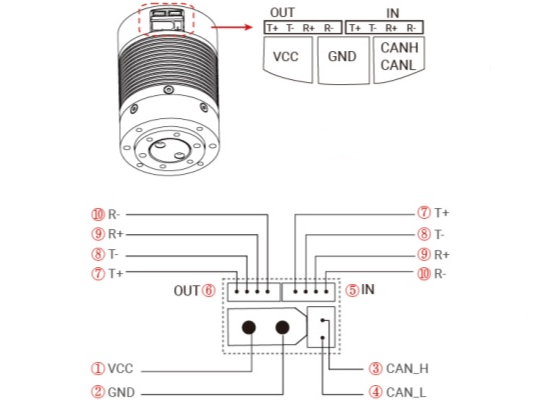
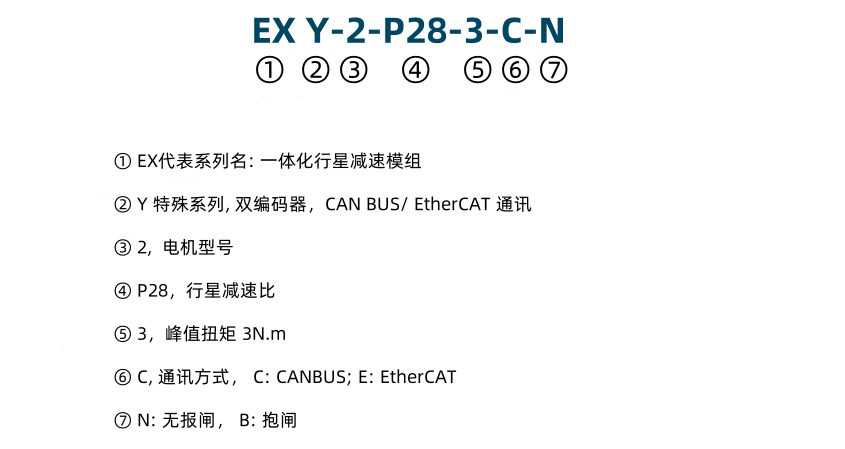
EX Y-2-P28-7-X-N | |
EX Y-4-P36-36-X-N | |
端口定义 | 端口说明 |
① VCC | 电源正极 |
② GND | 电源负极 |
③ CAN_H | CAN_H 网络信号端 |
④ CAN_L | CAN_L 网络信号端 |
⑤ EtherCAT_IN | EtherCAT 输入端 |
⑥ EtherCAT_OUT | EtherCAT 输出端 |
⑦ T+ | 主站发送控制命令到模组 |
⑧ T- | 模组发送状态反馈到主站 |
⑨ R+ | 主站反射模组的状态数据 |
⑩ R- | 模组反射主站的控制命令 |
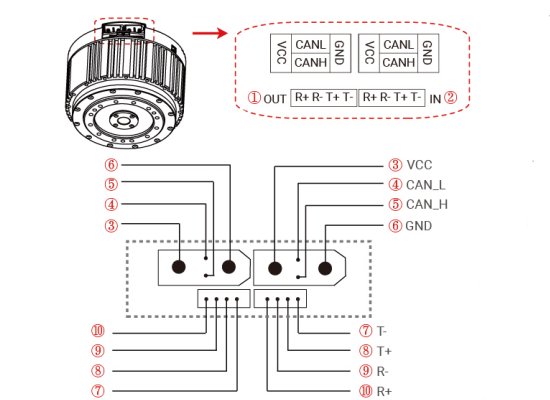
EX Y-6-P20-60-X-N | |
EX Y-8-P20-120-X-N | |
端口定义 | 端口说明 |
① EtherCAT_OUT | EtherCAT 输出端 |
② EtherCAT_IN | EtherCAT 输入端 |
③ CAN_L | CAN_L 网络信号端 |
④ CAN_H | CAN_H 网络信号端 |
⑤ GND | 电源负极 |
⑥ VCC | 电源正极 |
⑦ T- | 模组发送状态反馈到主站 |
⑧ T+ | 主站发送控制命令到模组 |
⑨ R- | 模组反射主站的控制命令 |
⑩ R+ | 主站反射模组的状态数据 |
EX Y-12-P20-320-X-N | |
EX Y-15-P20-450-X-N | |
端口定义 | 端口说明 |
① EtherCAT_OUT | EtherCAT 输出端 |
② EtherCAT_IN | EtherCAT 输入端 |
③ VCC | 电源正极 |
④ CAN_L | CAN_L 网络信号端 |
⑤ CAN_H | CAN_H 网络信号端 |
⑥ GND | 电源负极 |
⑦ T- | 模组发送状态反馈到主站 |
⑧ T+ | 主站发送控制命令到模组 |
⑨ R- | 模组反射主站的控制命令 |
⑩ R+ | 主站反射模组的状态数据 |
应用
行星EX系列特殊减速电机专为机械臂关节设计,具备双编码器,高精度、高刚性和低背隙特性,可满足不同负载场景的精准控制需求。该系列电机广泛应用于工业机器人、协作机器人、自动化生产线、医疗机械臂、物流分拣系统及精密装配设备等领域,确保高速运行下的稳定传动与精准定位。其紧凑结构、高扭矩密度和长寿命设计,可有效提升机械臂的动态响应能力与耐久性,适用于高重复精度要求的自动化作业场景,助力智能制造与柔性生产。



产品参数
参数 | 单位 | Y2-7 | Y4-10 | Y4-36 | Y6-60 | Y8-120 | Y12-320 | Y15-450 |
减速比 | - | 28.17 | 12.6 | 36 | 19.612 | 19.612 | 20 | 20.25 |
输入电压 | V | 24 | 24 | 24 | 48 | 48 | 48 | 72 |
空载转速 | RPM | 178 | 317 | 111 | 176 | 158 | 125 | 93 |
空载输入电流 | A | 1 | 1 | 0.9 | 0.9 | 1.6 | 27 | 3.5 |
额定转速 | RPM | 142 | 238 | 83 | 153 | 127 | 100 | 74 |
额定转矩 | N.m | 2.5 | 4 | 11.5 | 20 | 43 | 85 | 145 |
额定输出功率 | W | 37 | 100 | 100 | 320 | 574 | 1000 | 1124 |
额定相电流 | A(rms) | 3 | 7.8 | 6.1 | 9.5 | 17.6 | 30 | 25 |
峰值扭矩 | N.m | 7 | 10 | 34 | 60 | 110 | 320 | 450 |
峰值相电流 | A(rms) | 8.1 | 19.5 | 21.5 | 29.1 | 43.8 | 100 | 69.2 |
效率 | % | 63 | 69.5 | 63.1 | 72.7 | 79 | 75 | 824 |
电机反电势常数 | Vdc/Krpm | 4.3 | 6 | 6 | 16 | 19.2 | 17.9 | 29.9 |
模组扭矩常数 | N.m/A | 0.8 | 0.8 | 1.9 | 21 | 24 | 3.3 | 5.8 |
电机电阻 | Ω | 0.61 | 0.32 | 0.35 | 0.41 | 0.18 | 0.12 | 0.08 |
电机线电感 | mH | 0.13 | 0.14 | 0.17 | 0.51 | 0.31 | 0.05 | 0.14 |
极对数 | - | 13 | 13 | 13 | 10 | 10 | 20 | 20 |
齿槽转矩 | mN.m | 20 | 30 | 50 | 30 | 50 | 1420 | 1480 |
接线方式 | - | Y | Y | Y | Y | Y | Y | Y |
反驱动力矩 | N.m | 0.4 | 0.8 | 1.14 | 1.6 | 3.21 | 3.8 | 4 |
背隙 | Arcmin | 12 | 10 | 10 | 10 | 10 | 10 | 10 |
轴向载荷 - 受拉 | KN | 0.25 | 1.2 | 13 | 1.8 | 4 | 4.5 | 5.4 |
轴向载荷 - 受压 | KN | 0.25 | 1.2 | 13 | 0.8 | 1 | 4.5 | 5.4 |
径向载荷 | KN | 1 | 1.2 | 1.5 | 2 | 4.5 | 5 | 6 |
转动惯量 | Kg.cm² | 0.17 | 0.25 | 0.3 | 0.66 | 1.5 | 129 | 31.6 |
编码器类型 | - | Dual Encoder ABS-17BIT(Input)/18BIT(Output) | Dual Encoder ABS- 17BIT (Input)/17BIT (Output) | |||||
重复定位精度 | Degree | <0.01 | <0.01 | <0.01 | <0.01 | <0.01 | <0.01 | <0.01 |
通信方式 | - | CAN BUS /EtherCAT | CAN/EtherCAT | CAN BUS /EtherCAT | ||||
重量 | Kg | 0.26 | <0.01 | 0.36 | 0.82 | 1.4 | 26 | 3.6 |
绝缘等级 | - | F | <0.01 | F | F | F | F | F |
额定扭矩测试方法:在环境温度摄氏24度(无其他散热方式)下,在额定转速下进行测试,电机扭矩在温升60度条件下达到温度平衡、可长时间工作点为该电机额定扭矩值。
Model | 扭矩 (N.m) | 温升 (℃) | 堵转时间 time (s) | 相电流 (Arms) |
Y2-7 | 3.75 | 20 | 15 | 4.3 |
5 | 48 | 10 | 5.7 | |
6.25 | 31 | 8 | 7.4 | |
7.5 | 59 | 5 | 8.6 | |
Y4-10 | 5.2 | 41 | 10 | 7.8 |
6 | 16 | 8 | 9.1 | |
7.2 | 26 | 5 | 11 | |
8 | 30 | 3 | 12.1 | |
Y4-36 | 17.25 | 30 | 15 | 9.2 |
23 | 58 | 10 | 12.7 | |
28.75 | 41 | 5 | 16.3 | |
34.5 | 50 | 3 | 21.2 | |
Y6-60 | 30 | 17 | 15 | 12.7 |
40 | 29 | 10 | 17.7 | |
50 | 37 | 8 | 22.6 | |
60 | 24 | 5 | 28.3 | |
Y8-120 | 64.5 | 7 | 15 | 23.3 |
86 | 10 | 10 | 31.1 | |
107.5 | 26 | 8 | 38.9 | |
129 | 30 | 5 | 43.8 | |
Y15-450 | 217.5 | 15 | 15 | 31.1 |
290 | 15 | 10 | 41 | |
362.5 | 20 | 8 | 51.6 | |
435 | 25 | 5 | 67.2 |
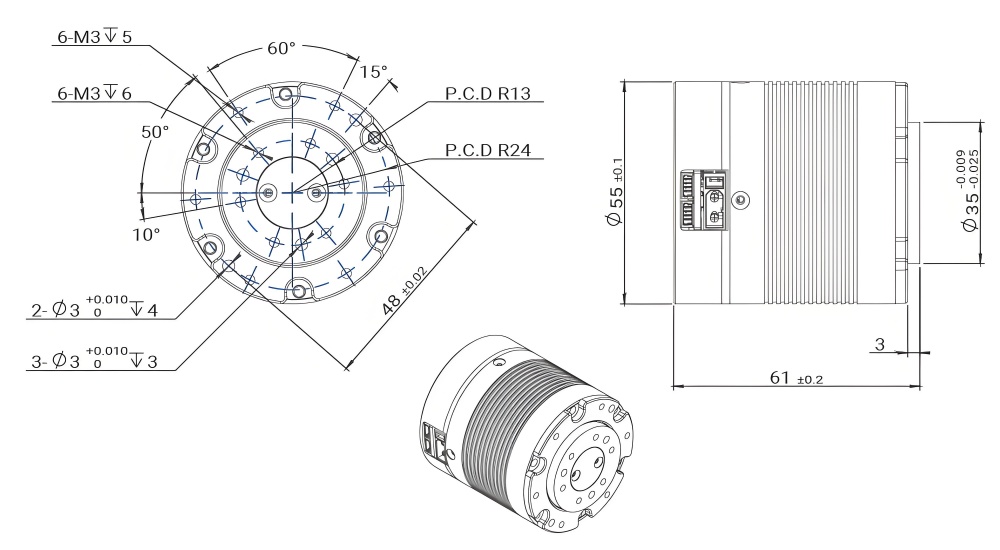
EX Y-2-P28-7-X-N
EX Y-4-P12-10-X-N
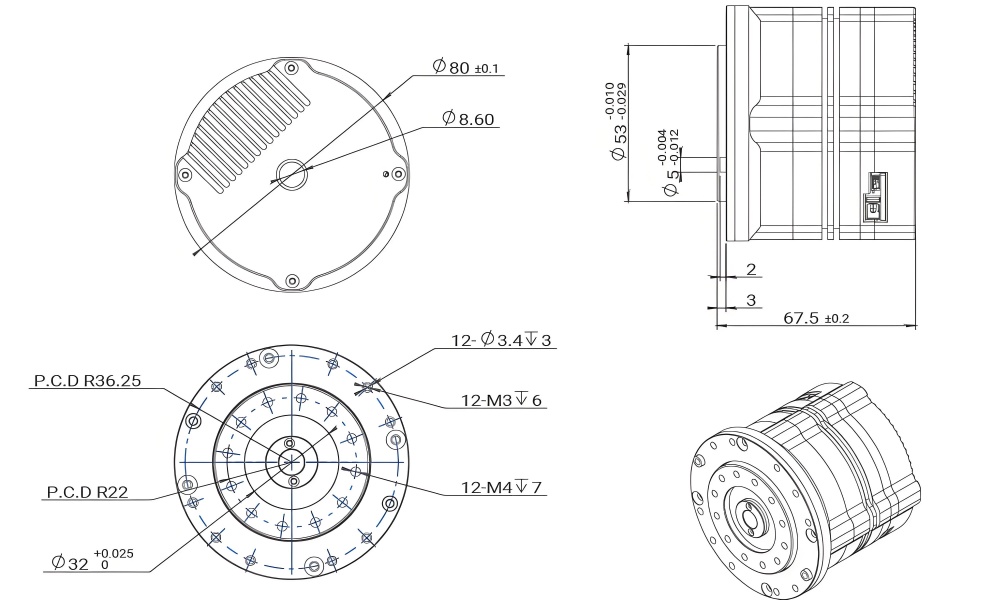
EX Y-4-P36-36-X-N
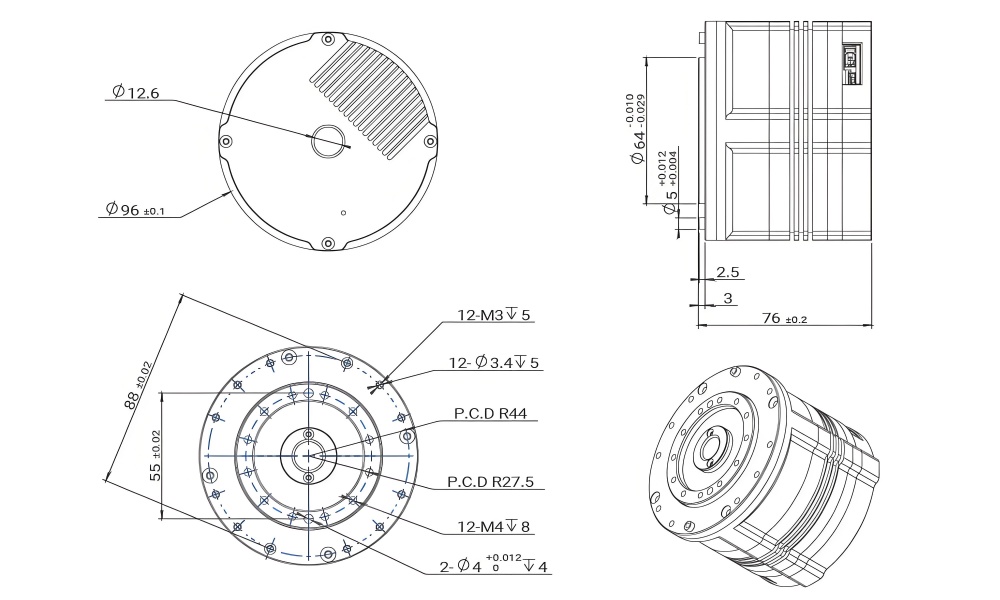
EX Y-6-P20-60-X-N
EX Y-8-P20-120-X-N
EX Y-12-P20-320-X-N
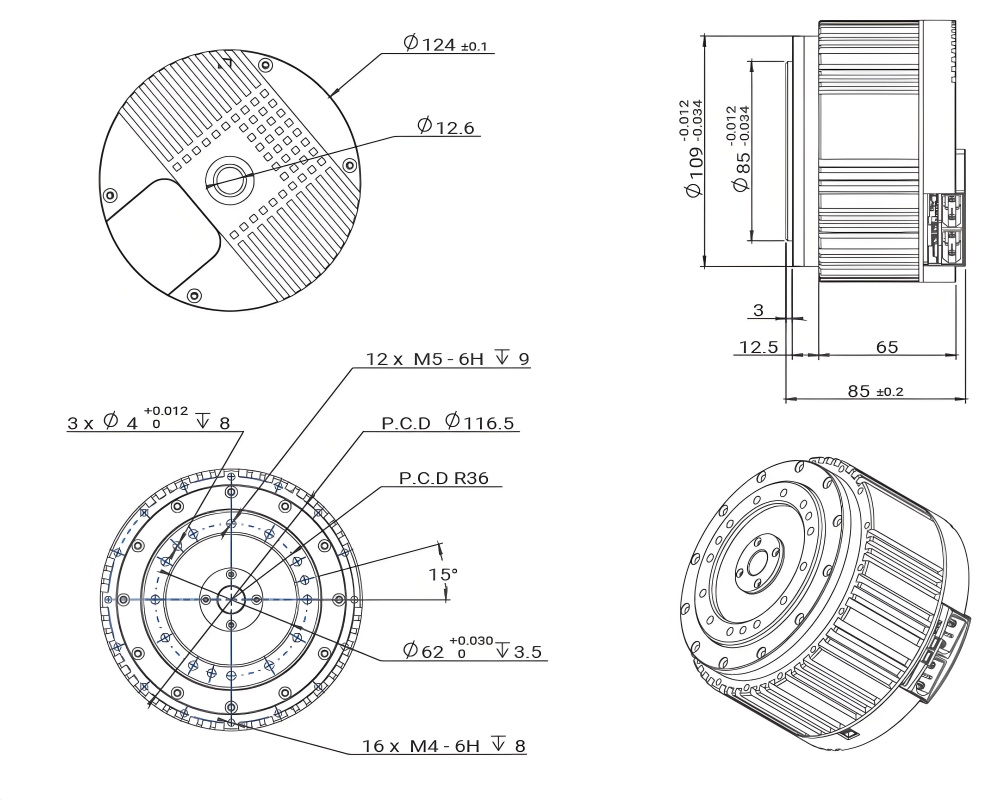
EX Y-15-P20-450-X-N
联系我们