

Product Description
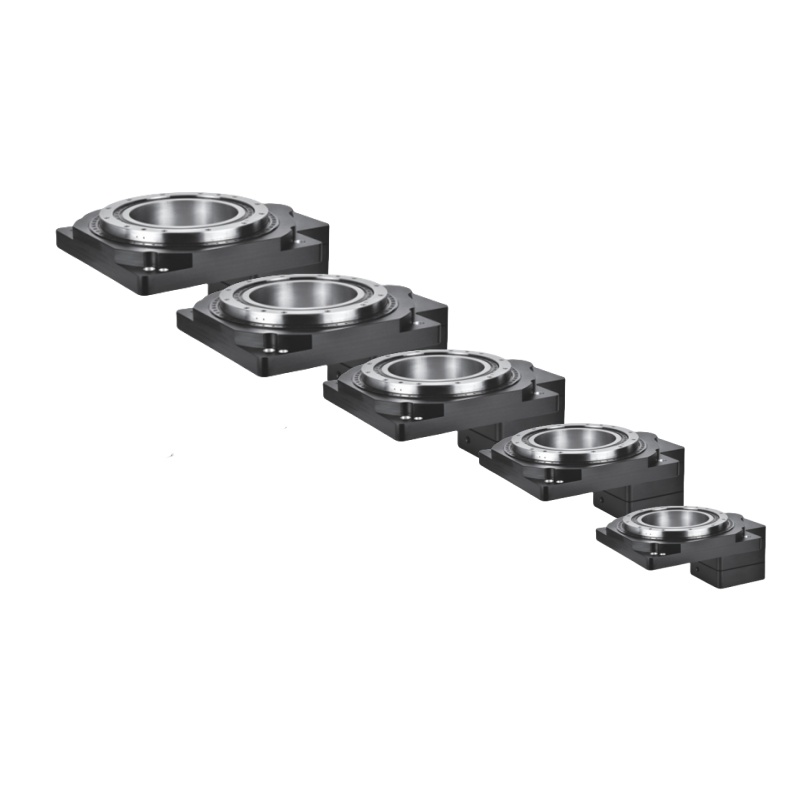
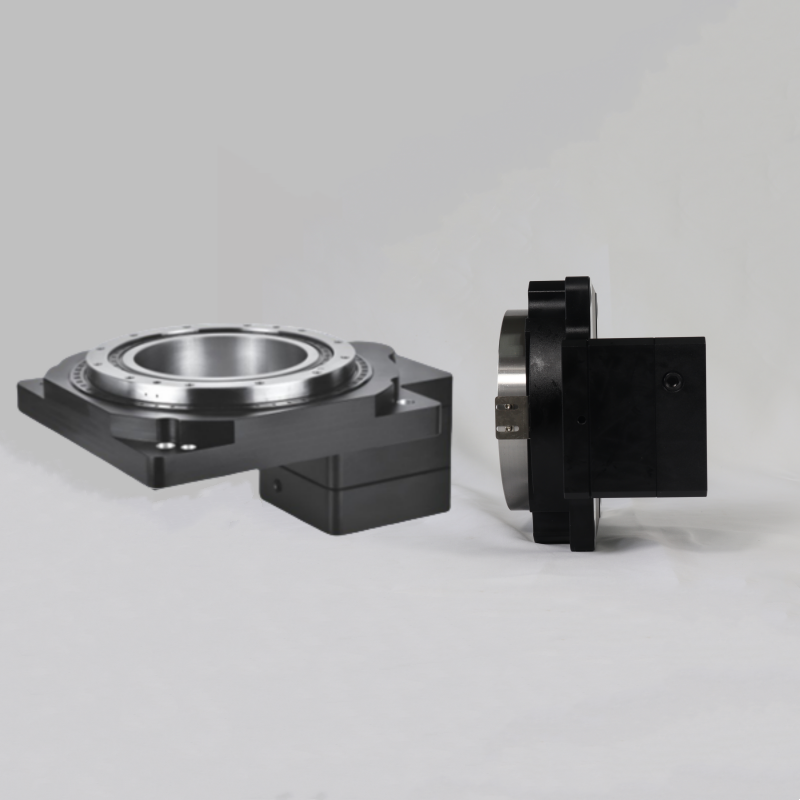
The hollow rotary platform is a new type of rotary load device, which combines high transmission efficiency, high precision, high rigidity, and high cost performance, and combines the advantages of servo motors, cam dividers and direct drive motors.
Use high-precision gear structure and radial bearings. Improved torque and rigidity, more stable load bearing, can be divided at any angle with servo motors or stepper motors, which can not only meet the number of control that the divider cannot achieve, but also the positioning accuracy is comparable to that of direct drive motors, and the positioning of inertial loads can be achieved in a short time.
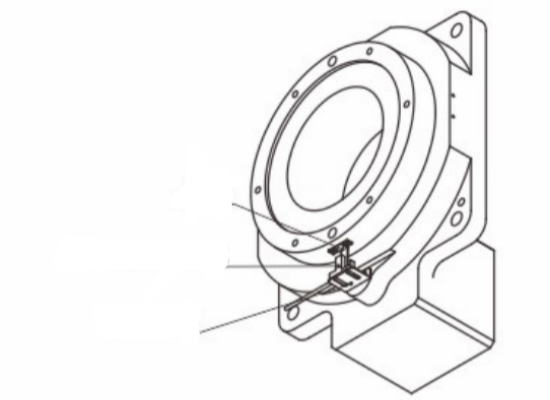
Sensor sheet
674 sensor
needs to be purchased separately
Sensor bracket
1.Easy installation, low noise, strong bearing capacity
2.Not easy to deform
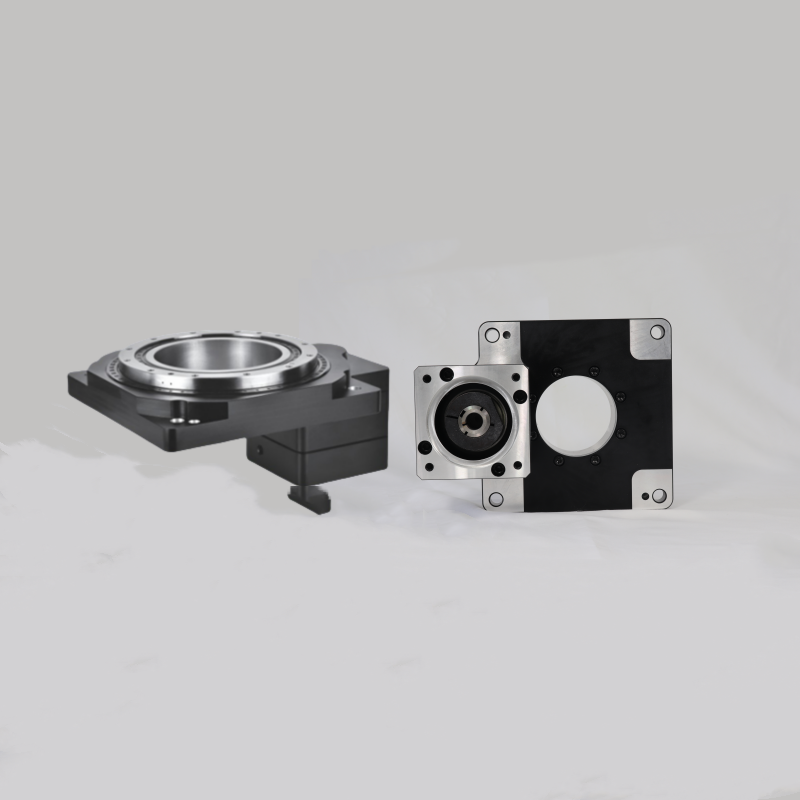
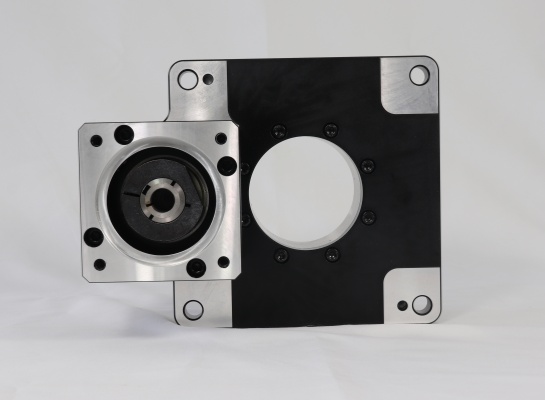
Advanced flange connecting plate design, using 7075 aluminum, not easy to deformation
3.High transmission rate
The material has the characteristics of small deformation, high toughness, corrosion resistance, etc., suitable for various application environments
4.Strong practicality
The concentricity of the connection between the reducer and the motor output ,make the transmission efficiency are greatly improved
High toughness and corrosion resistance, high transmission efficiency
5.Hardness - Selected steel with high hardness
Made of selected steel, strong rigidity, special surface treatment, high hardness, good seismic performance, suitable for high speed, to ensure the precision of hole processing

Application
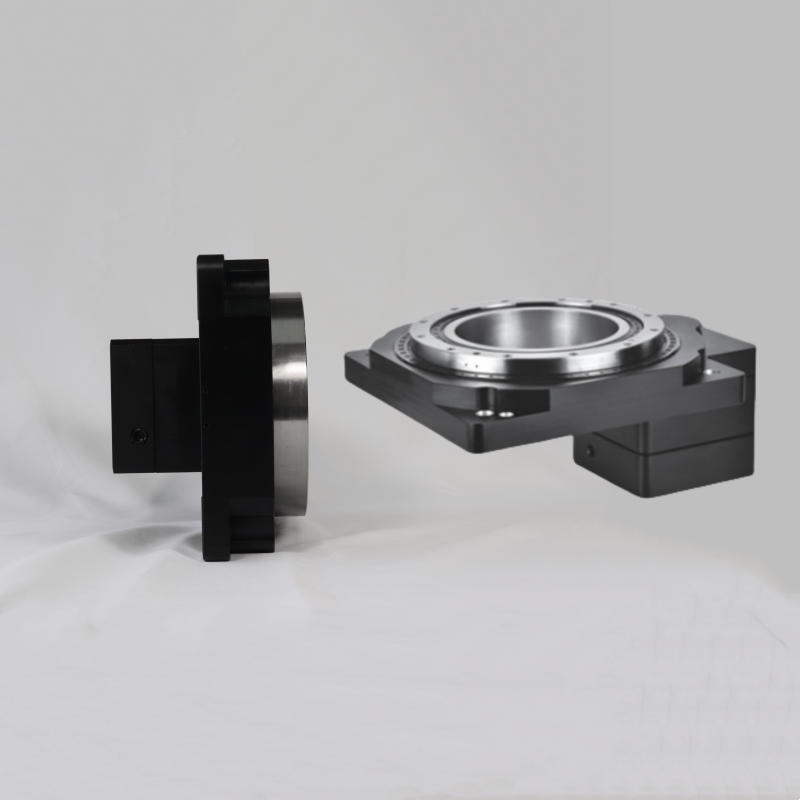
The hollow rotary platform is a high-precision, high-rigidity rotary motion mechanism that is widely used in automation equipment and precision machinery. Its core feature is the hollow shaft design, which is convenient for cables, gas or liquid lines to pass through, reduces the entanglement problem during rotation, and improves the integration and reliability of the equipment.
In the field of industrial robots, hollow rotary platforms are often used in scenarios such as joint rotation and end effector positioning to ensure precise motion control. On automated production lines, it can be used for indexing turntables, precision assembly, laser processing and testing equipment to achieve high repeatability positioning accuracy. In addition, in semiconductor equipment, medical instruments, CNC machine tools and military equipment, hollow rotary platforms meet stringent precision and stability requirements with low backlash and high load capacity.



Product parameters
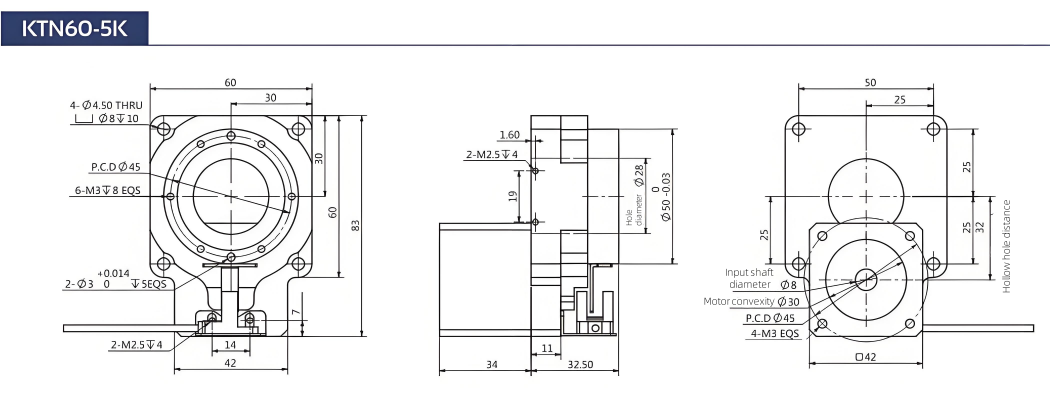
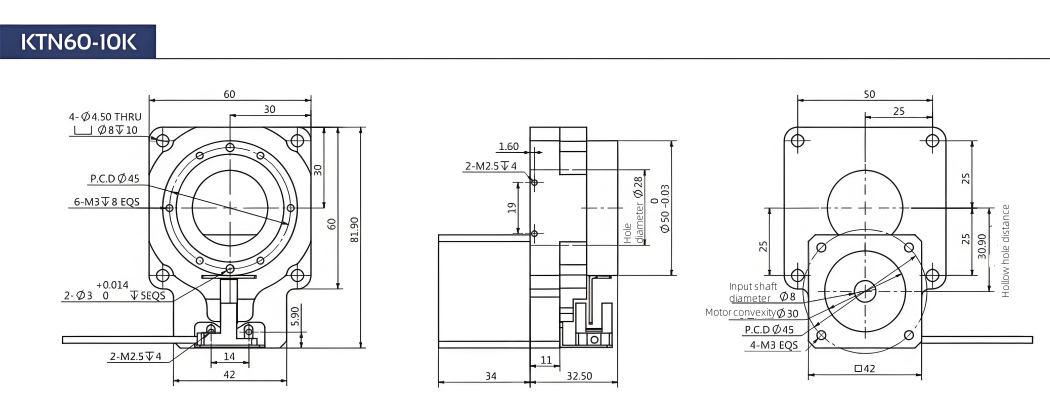
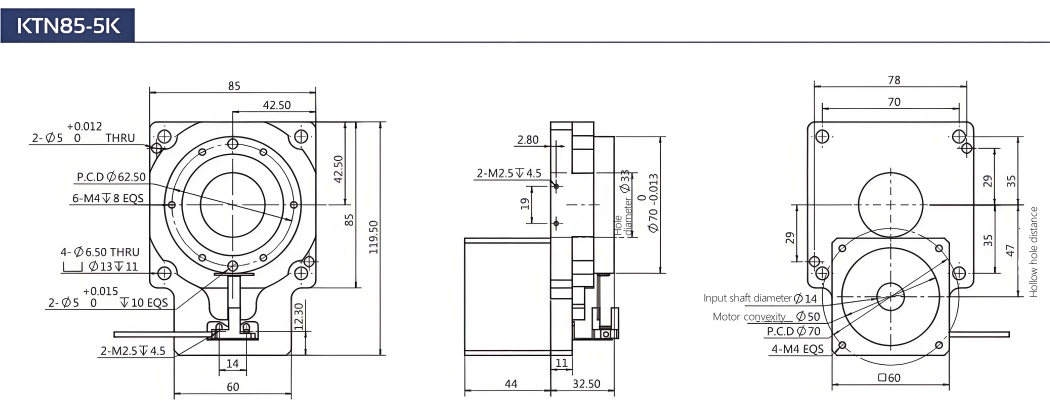
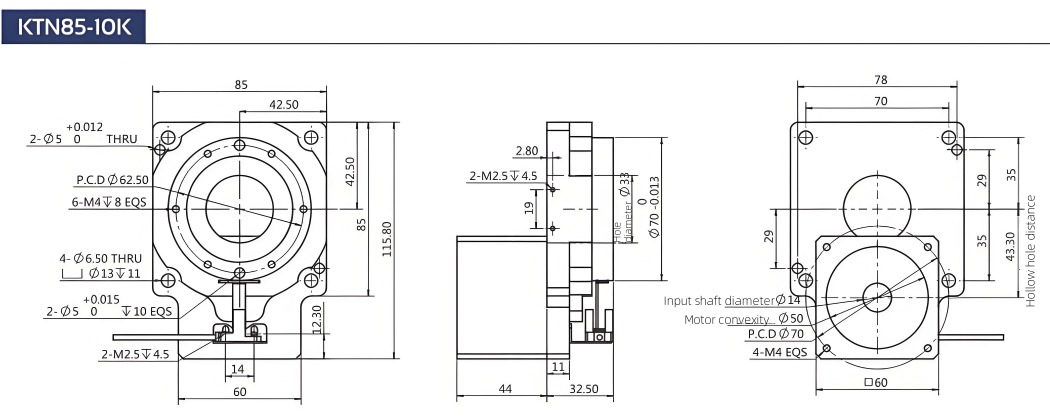
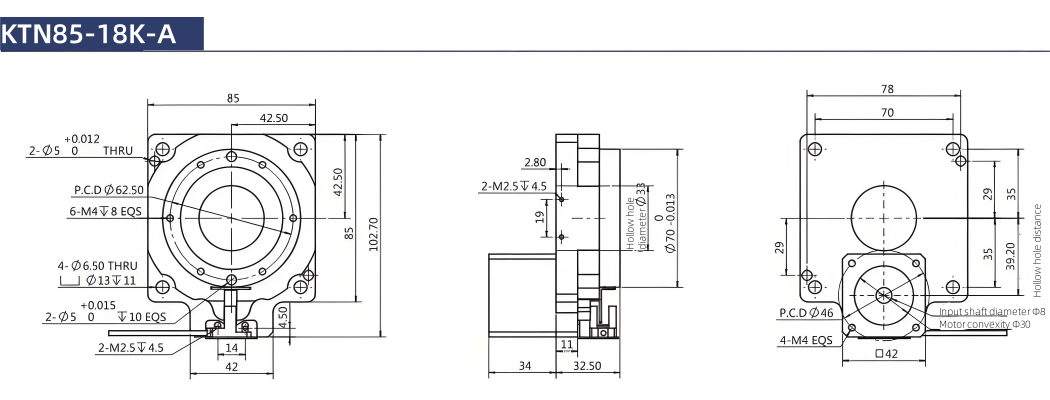
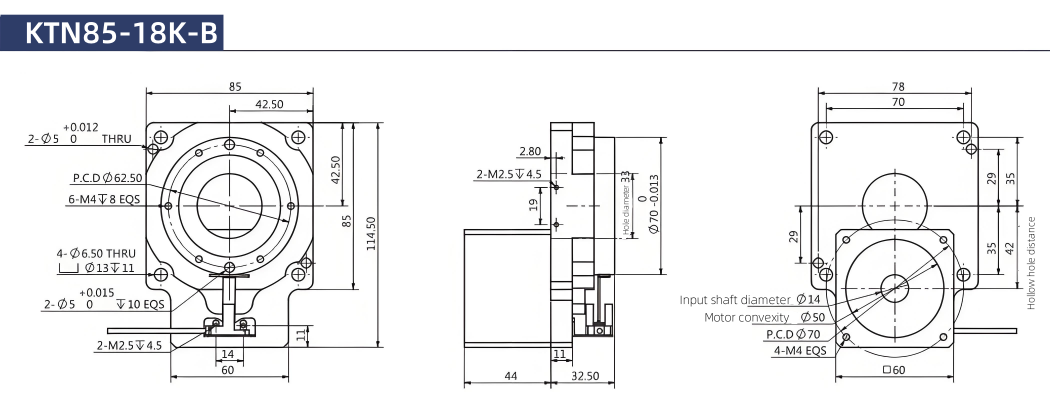
Parameters | KTN60-5k | KTN60-10K | KTN85-5K | KTN85-10K | KTN85-18K-A | KTN85-18K-B |
Rotating platform bearing | Crossed roller bearings | |||||
Reduction ratio i (excluding reducer) | 1:05 | 1:10 | 1:05 | 1:10 | 1:18 | 1:18 |
Allowable input torque N.m | ≤5 | ≤5 | ≤45 | ≤35 | ≤20 | ≤35 |
Allowable disk speed rpm | 100 | |||||
Repeatable positioning accuracy arc-sec | ±15 | |||||
Positioning accuracy arc-sec | ±30 | |||||
Applicable motor | 42 stepper 100w servo | 57 stepper 60 frame servo | ||||
Allowable axial pressure N | 200 | 200 | 400 | 400 | 400 | 400 |
Rotating platform flatness mm | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
Rotating platform concentricity mm | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
Precision life hr | 20000 (Intermittent operation) | |||||
Protection level IP | 40 | |||||
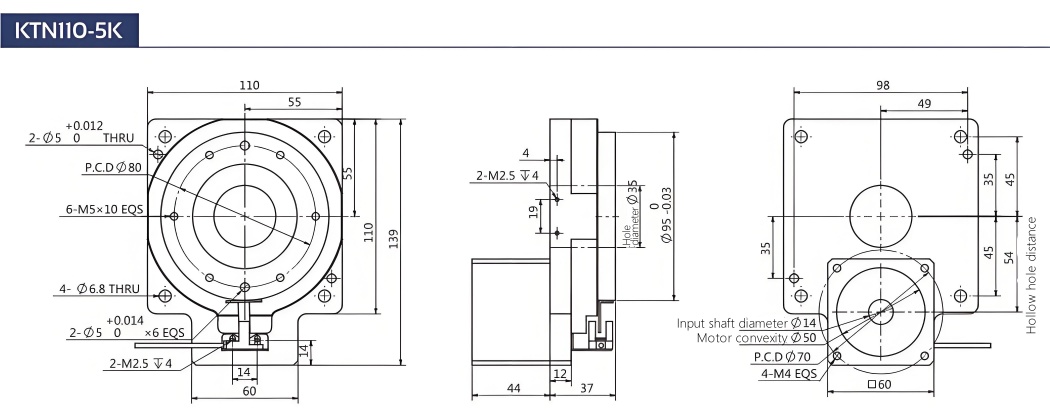
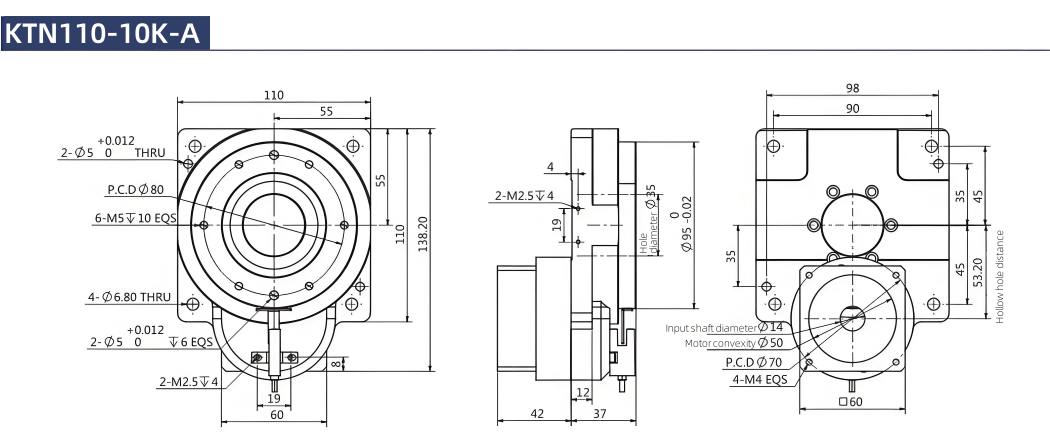
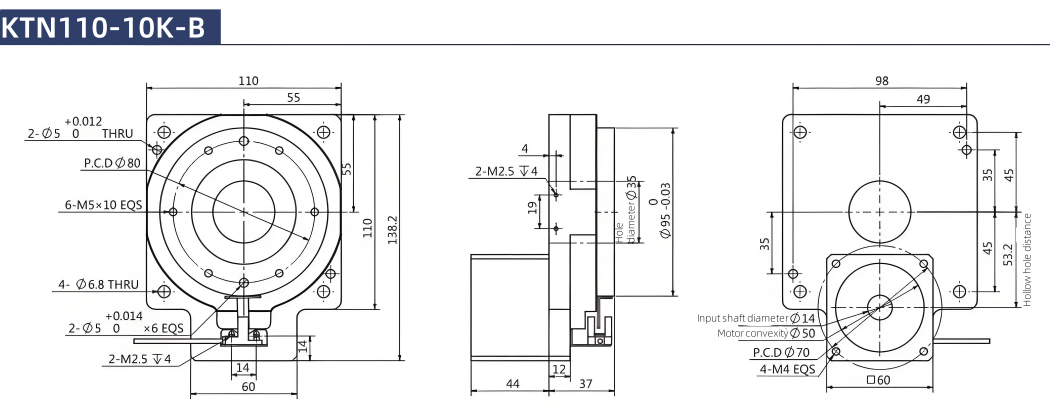
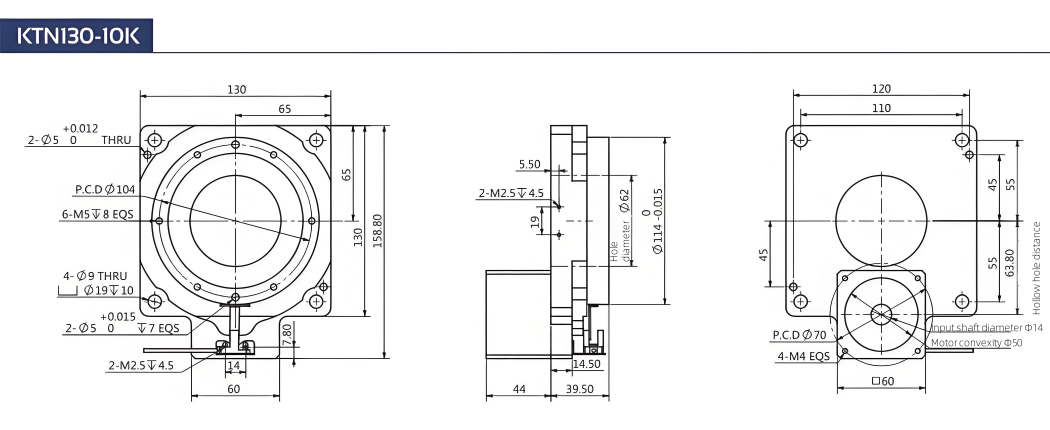
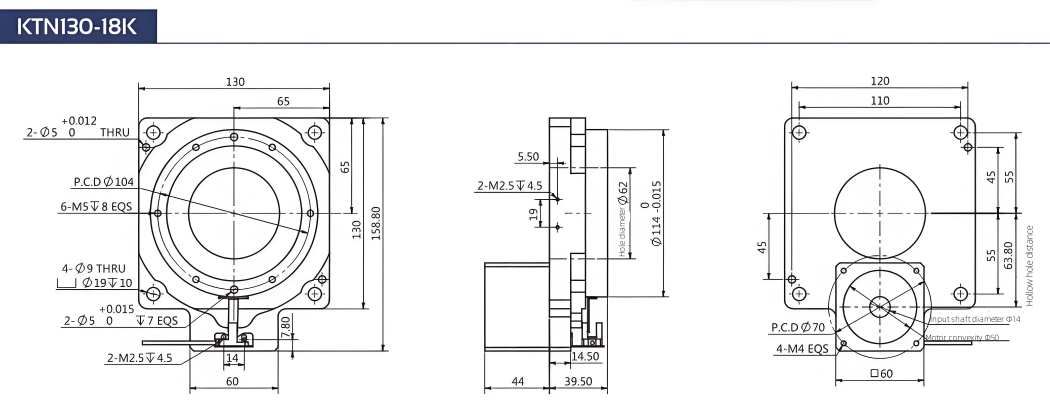
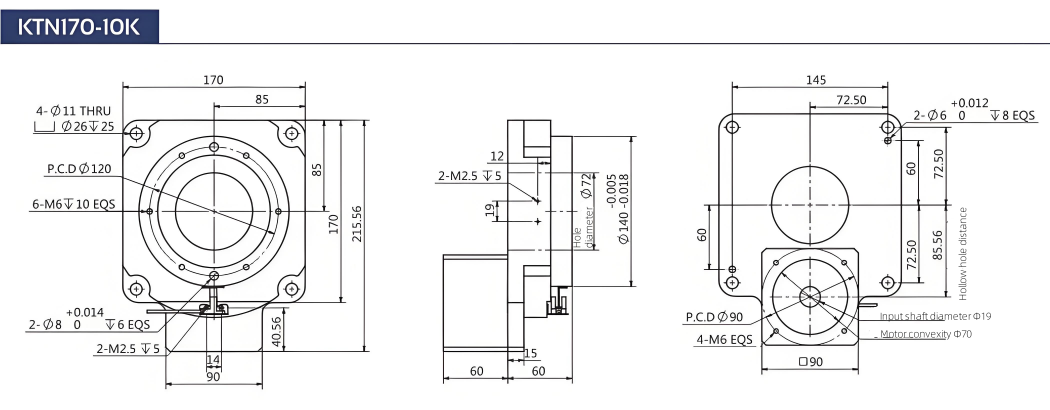
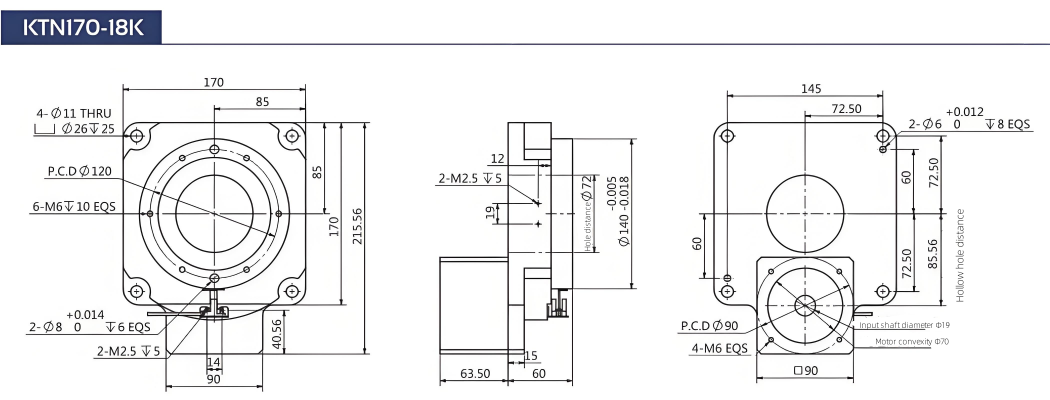
Parameters | KTN110-5K | KTN110-10K-A | KTN110-10K-B | KTN130-10K | KTN130-18K | KTN170-10K | KTN170-18K |
Rotating platform bearing | Crossed roller bearings | ||||||
Reduction ratio i (excluding reducer) | 1:05 | 1:10 | 1:10 | 1:10 | 1:18 | 1:10 | 1:18 |
Allowable input torque N.m | ≤47 | ≤35 | ≤35 | ≤55 | ≤55 | ≤72 | ≤50 |
Allowable disk speed rpm | 100 | ||||||
Repeatable positioning accuracy arc-sec | ±15 | ||||||
Positioning accuracy arc-sec | ±30 | ||||||
Applicable motor | 57 stepper 60 frame servo | 86 stepper 80 frame servo | |||||
Allowable axial pressure N | 800 | 900 | 800 | 1000 | 1500 | ||
Rotating platform flatness mm | 0.01 | ||||||
Rotating platform concentricity mm | 0.01 | ||||||
Precision life hr | 20000 (Intermittent operation) | ||||||
Protection level IP | 40 | ||||||
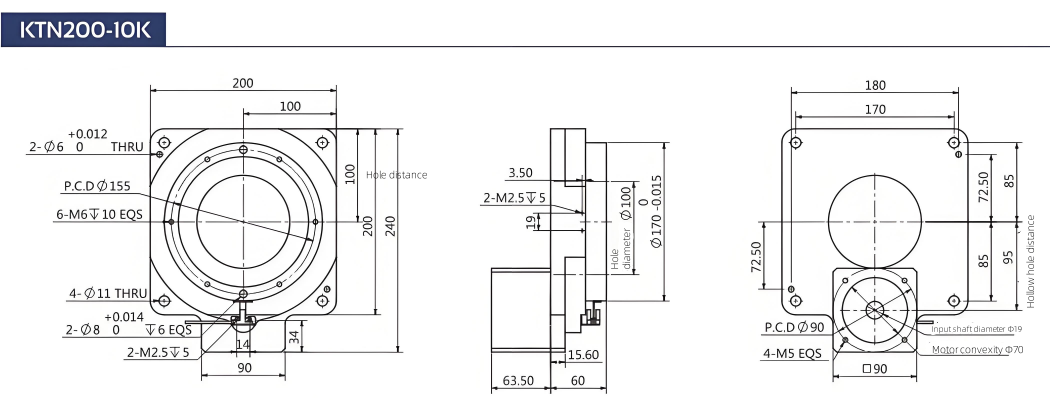
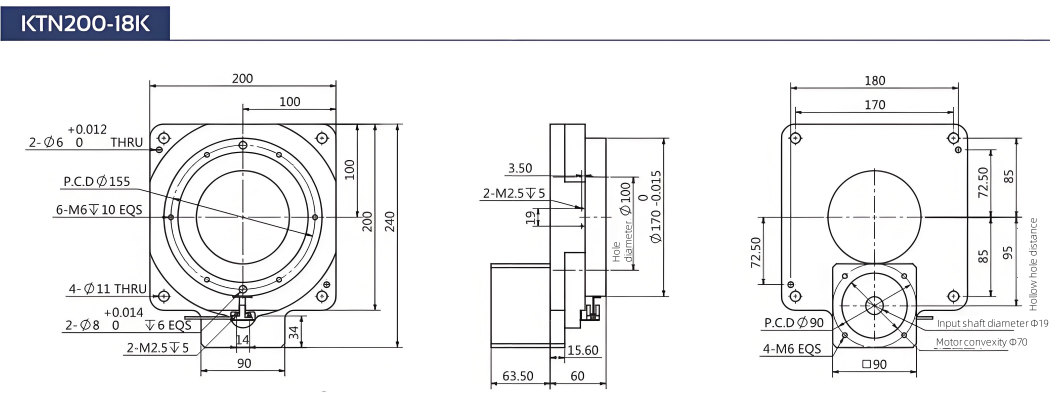
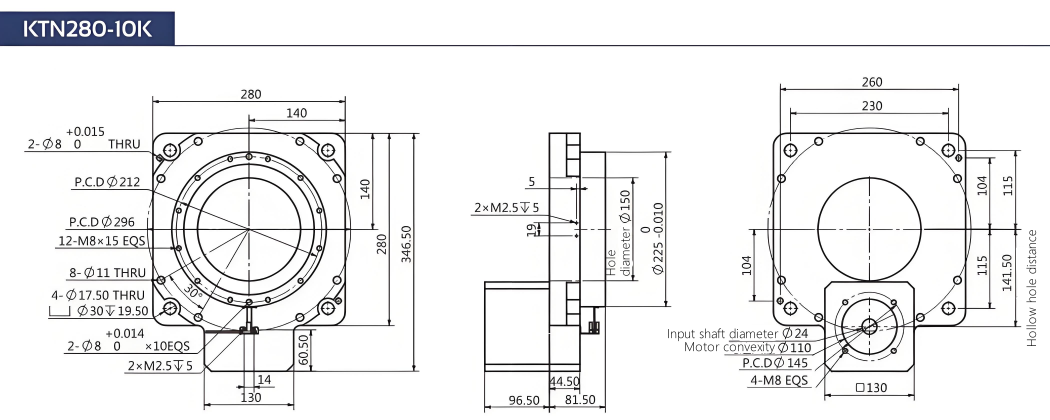
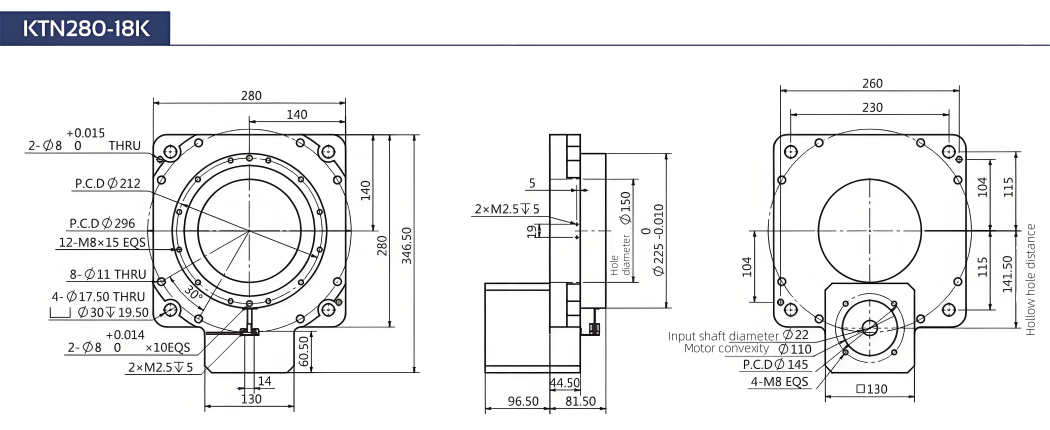
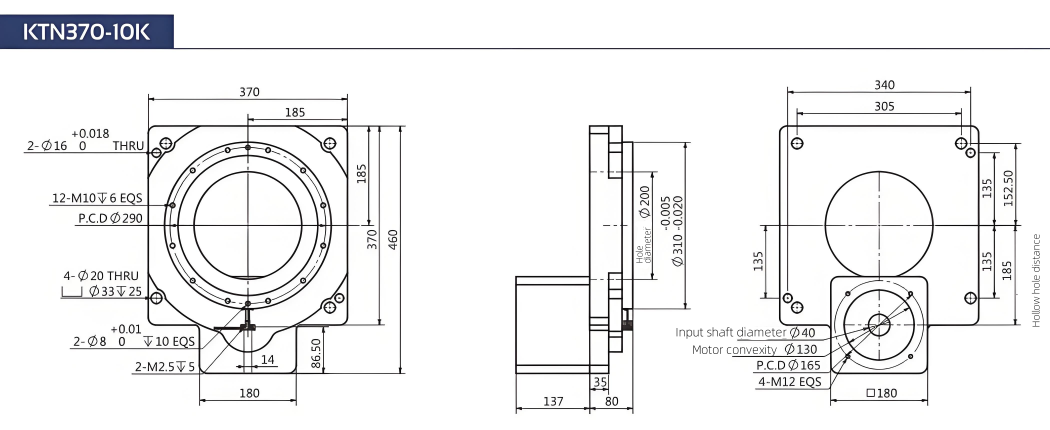
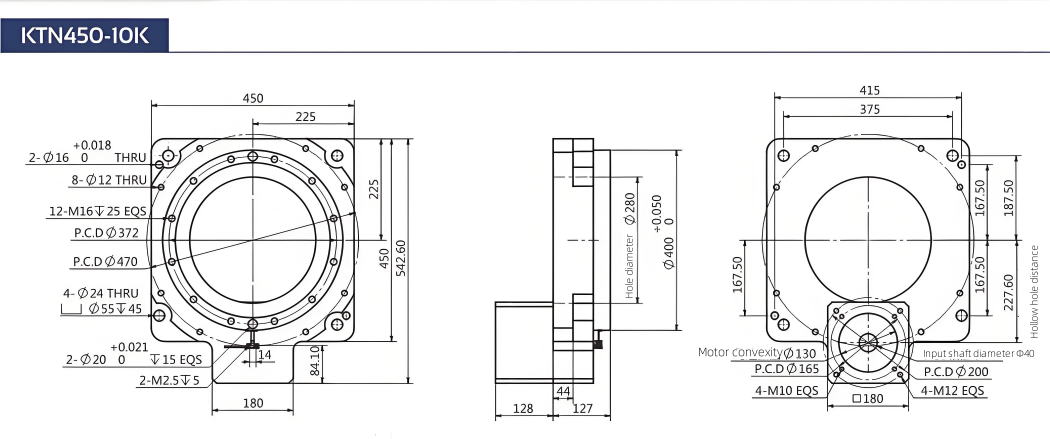
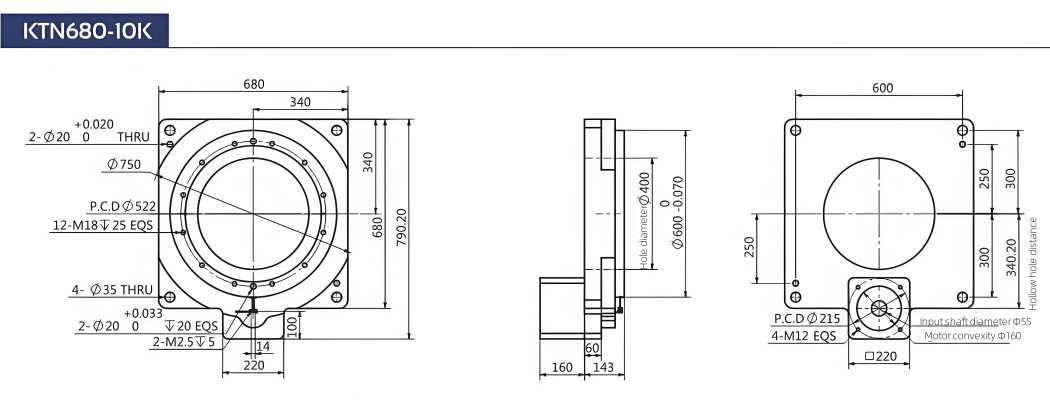
Parameters | KTN200-10K | KTN200-18K | KTN280-10K | KTN280-18K | KTN370-10K | KTN450-10K | KTN680-10K |
Rotating platform bearing | Crossed roller bearings | ||||||
Reduction ratio i (excluding reducer) | 1:10 | 1:18 | 1:10 | 1:18 | 1:10 | 1:10 | 1:10 |
Allowable input torque N.m | ≤90 | ≤72 | ≤135 | ≤135 | ≤200 | ≤300 | ≤400 |
Allowable disk speed rpm | 100 | 50 | 50 | 30 | |||
Repeatable positioning accuracy arc-sec | ±15 | ±20 | |||||
Positioning accuracy arc-sec | ±30 | ±40 | |||||
Applicable motor | 86 stepper 80 frame servo | 130 frame servo | 180 frame servo | stepper servo | |||
Allowable axial pressure N | 2000 | 4000 | 8000 | 12000 | 40000 | ||
Rotating platform flatness mm | 0.01 | 0.02 | 0.03 | ||||
Rotating platform concentricity mm | 0.01 | 0.02 | 0.03 | ||||
Precision life hr | 20000 (Intermittent operation) | ||||||
Protection level IP | 40 | ||||||
Service
Direct connection can improve reliability and reduce costs. The workbench and robot arm that need to be installed can be directly installed on the rotating platform. Compared with the use of mechanical parts such as pulleys, the time and cost of mechanical design, parts allocation, belt state adjustment and other links can be reduced.
Motor configuration
You can freely choose stepper motors or servo motors of various brands, except for the KTN series dedicated stepper motors.
High-precision positioning without backlash
No backlash, positioning accuracy ≤15sec, and repeated positioning accuracy can reach ±5sec.
Large-diameter hollow structure
Wiring and piping are more convenient and simple, and this feature is particularly prominent in wiring and piping environments with complex wiring.
Pack


Contact Us