














Product Description

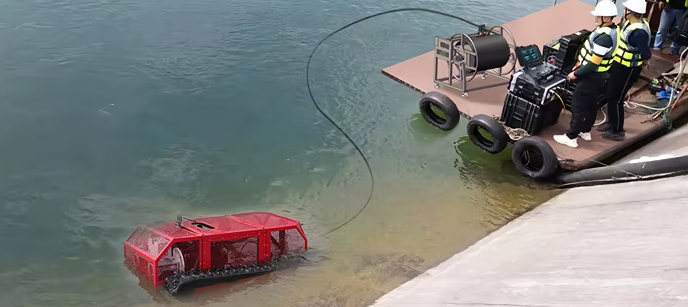
The AVA‑U13 underwater robot chassis is mainly used for underwater operations with a maximum depth of 30m. It can be customized for larger diving needs. It can be powered by generators, civil electricity or batteries plus inverters. It can carry a variety of equipment such as water pumps, high-pressure water guns, mud pumps, and bulldozers. It also provides secondary development and customization services.
Underwater Crawler
Robot Chassis
Can be equipped with water pump, high-pressure water gun,
siphon pump,shovel etc.
Supportsecondary development and applicationcustomization

Product Features

Matilda suspension system can buffer the impact of steps, fit the undulating terrain, has an excellent low-speed shock absorption effect. The two wheels share the absorbing spring, with less wearing parts and high reliability.

Integrated welded frame body strong structure
Maximum weight reduction,professional anti-comrosion coating for the whole vehicle
Integrated welding
Sturdy structure
Professional anti-corrosion coating
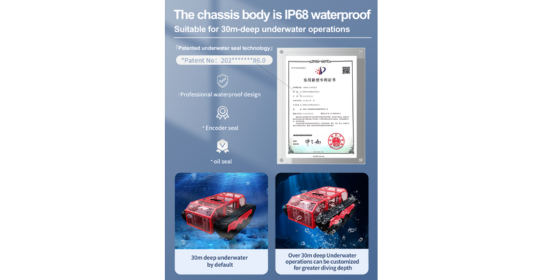
Patented underwater seal technology *Patent No:202****86.0
The chassis body is IP68 waterproof
Suitable for 30m-deep underwater operations
Professional waterproof design
Encoder seal
oil seal

High voltage power supply
Wire control standard with 50m
Can be customized 200m
>High precision oxygen free copper core,good electrical conductivity >Environmentally friendly PVC insulation layer
>High efficiency flame retardant,wear resistance and tensile resistance
Product parameters
Item | Data | Item | Data |
Dimension | 1220*890*520mm | Speed | 2.5-4KM/h |
Self Weight | 120kg | Designed Load | 100-300kg |
Waterproof | IP68 | Rated Torque | 100-500 NM |
Track Width | 130mm | Reducer Efficiency | 65-85% |
Gear Ratio | 1:10-1:40 | Suspension System | Matilda |
Motor | (0.75-1.5KW)*2 | Climbing Ability | ≤30°(can climb stairs) |
Motor Rated Speed | 1500r/min | Maximum Span | 290mm |
Cable Control Distance | Standard 50m, maximum 150m | Ground clearance | 140mm |
Maximum Underwater Depth | 30m | Power Supply | Generator or civil electricity |
Track grounding length | 880mm | Obstacle crossing ability | 115mm |
Characteristics | ||
Control characteristics | way to control | Speed control (PV), position control (PP), IP, CSP, CSV, CST |
Support motor | Waterproof AC torque motor | |
Vehicle control accuracy | ±0.1m | |
Speed control accuracy | ±0.05m/s | |
Communication Interface | RS-485 | Standard ModBus protocol |
CanOpen | Standard CanOpen protocol, CiA301/402 | |
EtherCAT | no | |
Encoder type | Encoder port | 2500P/R |
Ambient temperature | -20℃—50℃, use derating when it is higher than 40℃ | |
Altitude | 30 meters underwater, derating for use above 1000m | |
vibration | Less than 0.5G (4.9m/s2), less than 10Hz | |
Storage temperature | -40℃—70℃ | |
|
|
|
Automatic cable winder | IP68 camera | video screen remote control box |



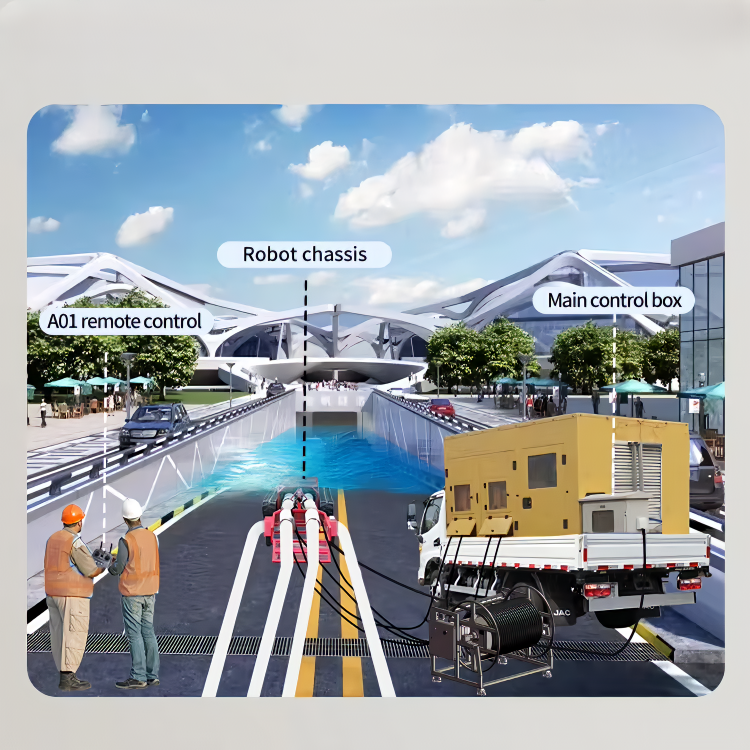
| Contrl modoes |
| Main control box |
| Operation schematic diagram |


Application
|
Drainage, dredging |
|
Breeding pond cleaning, dredging |
|
Underwater excavation, exploration |
|
Underwater transportation |
|
Pond dredging |




Modular design, convenient for
users to upgrade and modify
According to different purposes, the following personalized requirements (examples) can be proposed:
|
|
|
|
|
Camera | High-pressure water gun | Water pump | Reamer | Push blade |











