





产品描述
这款外径52mm的小型机器人关节执行器伺服电机主要用于机械臂,集成谐波减速器、编码器、直流电机和驱动器。该机器人关节伺服电机可直接用于机械臂关节,帮助快速构建机器人关节。

25型谐波减速器
齿隙 < 20arcse
33W 2500RPM 直流电机
电机驱动器 15位单圈编码器+16位多圈编码器
功能特点
1. 根据 CiA301 V4.2.0 规范隔离 CANopen 通信
A. 支持 SDO、TPDO、RPDO。
B. 支持速度模式、位置模式(轮廓模式、插补模式)
C. 支持心跳生成和消耗
2. 15 位绝对式编码器,单圈脉冲数高达 32768。
3. 多级 DD 电机结构,大扭矩输出。
4. 谐波减速器、电机、驱动器、编码器集成一体。
5. 低噪音、低振动、高速定位、高可靠性。
6. FOC 磁场定向矢量控制,支持位置/速度闭环。
7. 可工作于零迟滞给定脉冲状态,跟随零迟滞。
8. 16 位电子齿轮特性。
9. 提供 CANopen 上位机,可监控电机状态并修改参数。
10.位置模式,支持脉冲+方向信号,编码器跟随。
11.速度模式,支持PWM占空比信号调速。
12.具备堵转、过流保护、过压保护功能。
13.绝对值低功耗多圈功能
A.一体式舵机485/CAN通讯版本可增加多圈功能。
B.电机通电时,内部有充电电路为电池充电,电机断电时,电池电流消耗仅为0.07mA。
C.电机断电后,驱动电机轴旋转,唤醒编码器,继续记忆位置。
D.多圈记忆范围-60000~60000圈。
E.原点设置简便,任意位置均可设为原点。
F.多种回零方式:通讯回零、上电自动回零、零点信号输出。
G. 错误保护:电池断电报警。
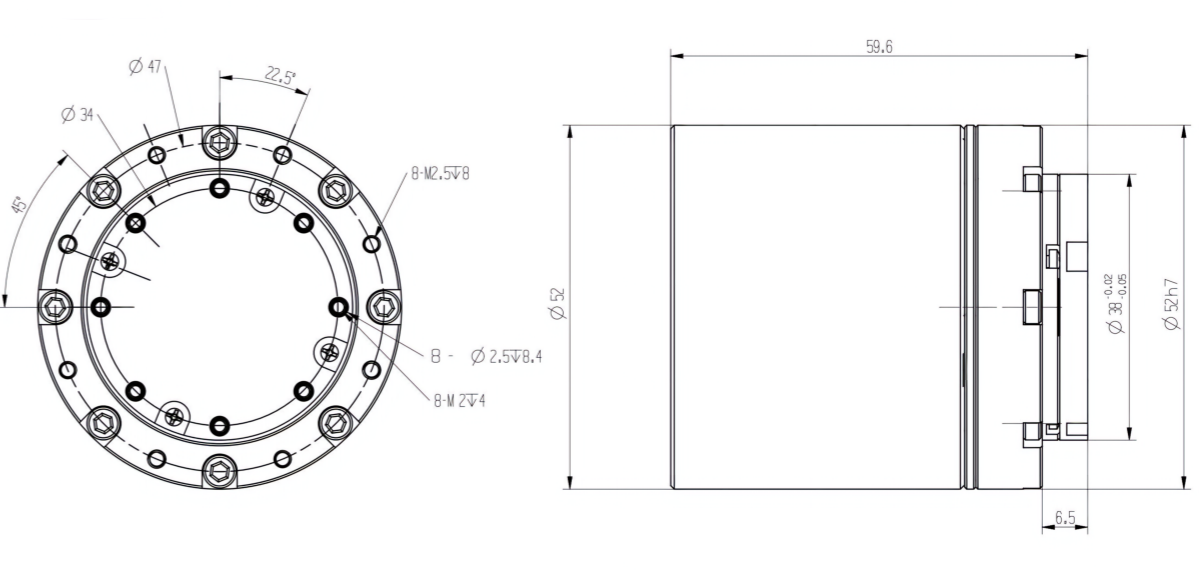
尺寸图
M4210E11B50

产品参数
型号参数 | M4210E11BXX | M4215E14BXX | M8010E17BXX | M8025E25BXX | |
整体参数 | 电机额定电压 | 36VDC±10% | 36VDC±10% | 36VDC±10% | 36VDC±10% |
电机额定电流 | 1.5A | 2A | 3.5A | 7A | |
减速后输出扭矩 | 3.2NM | 10NM | 34/51/51NM | 51/85NM | |
重量 | 0.4KG | 0.8KG | 1KG | 2.5KG | |
减速后的转速范围 | 0~40RPM | 0~40/0~25/0~20RPM | 0~30/0~18/0~15RPM | 0~30/0~19RPM | |
减速器参数 | 减速比 | 50 | 50/80/100 | 50/80/100 | 50/80 |
输出额定转矩 | 3.2NM | 7/10/10NM | 34/51/51NM | 51/85NM | |
启停峰值转矩 | 7.8NM | 23/30/36NM | 44/70/70NM | 127/178NM | |
背隙 | 小于10 弧秒 | 小于10 弧秒 | 小于20弧秒 | 小于 20弧秒 | |
设计寿命 | 8500hour | 8500hour | 8500hour | 8500hour | |
电机参数 | 扭矩 | 0.3NM | 0.5NM | 1NM | 2NM |
额定转速 | 2000RPM | 1500RPM | 1500RPM | 1000RPM | |
最大转速 | 2500RPM | 2000RPM | 2000RPM | 1500RPM | |
功率 | 33W | 50W | 100W | 200W | |
电阻 | 3.45 | 2.65 | 0.86 | 0.53 | |
电感 | 1.18mh | 1.1mh | 0.8mh | 0.5mh | |
转动惯量 | 0.9139x10-4 KG/M 2 | 0.9139x10-4 KG/M 2 | 0.69x10-4 KG/M 2 | 1.74x10-4 KG/M 2 | |
型号参数 | M4210E11BXX | M4215E14BXX | M8010E17BXX | M8025E25BXX | |
反馈信号 | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈16位) | 多圈绝对值编码器(单圈15位多圈9位) | |
冷却方式 | 自然冷却 | 自然冷却 | 自然冷却 | 自然冷却 | |
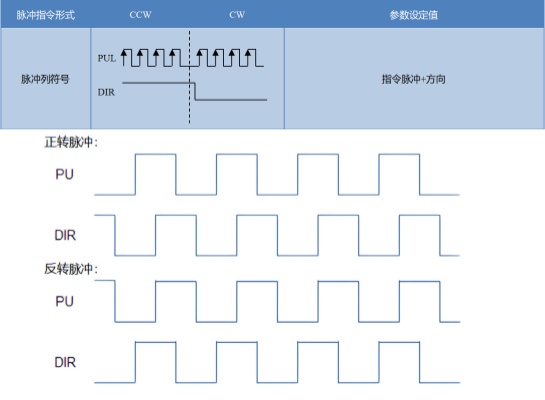
位置控制模式 | 最大输入脉冲频率 | 500KHz | 500KHz | 500KHz | 500KHz |
脉冲指令模式 | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相(控制器支持AB脉冲,强烈推荐) | 脉冲+方向,A相+B相 | |
电子齿轮比 | 设置范围 1~65535 比 1~65535 | 设置范围 1~65535 比 1~65535 | 设置范围 1~65535 比 1~65535 | 设置范围1~65535 比 1~65535 | |
位置采样频率 | 2KHZ | 2KHZ | 2KHZ | 2KHZ | |
保护功能 | 堵转报警,过流报警 | 堵转报警,过流报警 | 堵转报警,过流报警 | 堵转报警,过流报警 | |
通讯接口 | Canopen (CAN 通信) /Modbus(485 通信) | Canopen (CAN 通信) /Modbus(485 通信) | Canopen (CAN通信) | Canopen (CAN 通信,速率1M) | |
使用环境 | 环境温度 | 0~40° | 0~40° | 0~40° | 0~40° |
电机允许最高温度 | 85° | 85° | 85° | 85° | |
湿度 | 5~95% | 5~95% | 5~95% | 5~95% | |
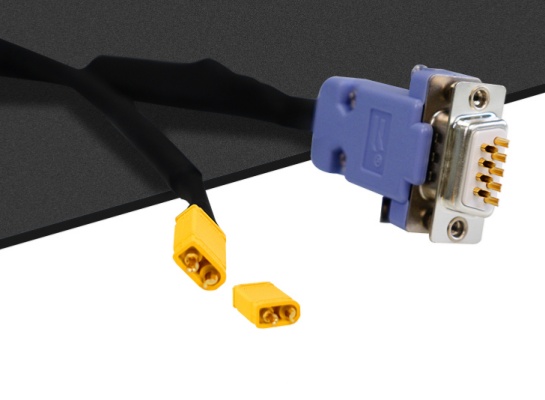
应用接线示意
接口定义
电源连接器

| 端子序号 | 名称 | 功能 |
1 | +V | 直流电源正极 +24V~36V,正负极接反会直接短路电源,也可能损坏驱动器 |
2 | GND | 直流电源地,正负极接反会直接短路电源,也可能损坏驱动器 |
通讯及输出接口
适用于CANOPEN通讯协议

DB9 公头 | |||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
PU+ | PU- | DIR+ | DIR- | WR+ | ZO | COM | CANL | CANH | |
蓝 | 蓝黑 | 绿 | 绿黑 | 红白 | 黄 | 黑白 | 棕 | 白 | |
端子序号 | 名称 | 功能 |
1 | PU+ | 脉冲控制信号:脉冲上升沿有效;PU-高电平时为3.3~5V,低电平时为0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于1.2μs。如采用+12V或+24V时需串联电阻。 |
2 | PU- | |
3 | DIR+ | 方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5μs建立。DIR-高电平时DIR-3.3~5V,低电平时0~0.5V。 |
4 | DIR- | |
5 | WR+ | 报警信号输出,内部为光耦NPN输出,平时为高阻态,报警时与COM导通。 |
6 | ZO | 编码器零点输出。有零点信号光耦合器NPN输出导通信号。 |
7 | COM | 输出信号与485电源公共地。 |
8 | CANL | CAN通讯端口CANL,内置隔离电源。 |
9 | CANH | CAN通讯端口CANH,内置隔离电源。 |
适用于MODBUS通讯协议
端子序号 | 名称 | 功能 |
1 | +V | 直流电源正极 +24V~36V,正负极接反会直接短路电源,也可能损坏驱动器 |
2 | GND | 直流电源地,正负极接反会直接短路电源,也可能损坏驱动器 |
端子序号 | 名称 | 功能 |
1 | PU+ | 脉冲控制信号:脉冲上升沿有效;PU-高电平时为3.3~5V,低电平时为0~0.5V。 为了可靠响应脉冲信号,脉冲宽度应大于1.2μs。如采用+12V或+24V时需串联电阻。 |
2 | PU- | |
3 | DIR+ | 方向信号:高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5μs建立。DIR-高电平时DIR-3.3~5V,低电平时0~0.5V。 |
4 | DIR- | |
5 | WR+ | 报警信号输出,内部为光耦NPN输出,平时为高阻态,报警时与COM导通。 |
6 | ZO | 编码器零点输出。有零点信号光耦合器NPN输出导通信号。 |
7 | COM | 输出信号与485电源公共地。 |
8 | 485A | 485通讯A口,内置隔离电源。 |
9 | 485B | 485通讯B口,内置隔离电源。 |
型号:3.7V 250mA
电机有供电时,内部有充电电路给电池充电;
电机无供电后,电机轴被带动旋转能唤醒编码器,继续记忆位置,消耗电池电流仅为0.07mA;
电池掉电报警。

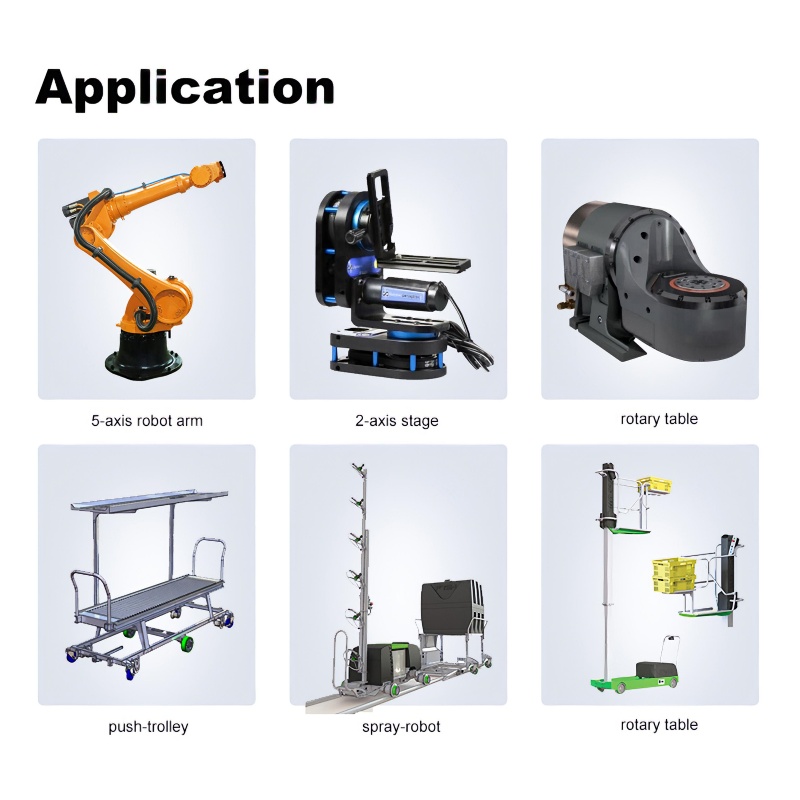
应用领域

采用模块化设计,关节模块紧凑,其重量、尺寸、安装方式、外观灯与传统产品相比都做了相当大的优化,主要应用于协作机器人和轻型机器人,能在很大程度上满足小型化、轻量化、模块化的需求。也可广泛应用于工业机器人、服务机器人、工业自动化设备、机床设备等领域。
发货

常见问答
Q1:M系列支持哪些通信协议?
A:M系列支持隔离CANopen、RS485、EasyCAN等协议,并可通过上位机进行切换与配置。
Q2:断电后还能记住当前位置吗?
A:可以,M系列支持低功耗多圈绝对值编码器(带电池版本),断电后驱动轴转动仍能被记录,重新上电自动恢复。
Q3:如何设置电机的原点?
A:原点可以通过通信方式设置、上电自动回零,也可以通过零点信号进行快速设置,用户可根据应用场景灵活选择。
Q4:是否需要外部驱动器?
A:不需要,M系列是高度集成的一体化伺服模组,内置电机、编码器和驱动器,用户无需额外配置。
Q5:是否支持过载保护?
A:是的,M系列具备堵转保护、过流保护、过压保护,并能通过上位机监测状态,保障运行安全。
Q6:M系列关节模组与 step/dir 接口兼容吗?
A:与step/dir接口兼容。在位置模式,支持脉冲+方向信号,编码器跟随。
Q7:M 系列关节模组可以在24V的电压下工作吗? 规格表上写的是36V±10%
A:不带刹车的可以在24V电压下长期工作,带刹车的不能在24V电压下长期工作。
Q8:M系列的掉电记忆功能是如何的?
A:掉电记忆:转矩不超过额定转矩,断电后会保持位置,不会掉下来。(编码器)必须有电池,如果掉电这段时间没有任何操作,再通电,是从之前的位置开始的。
Q9:软件中的绝对位置是什么意思?
A:就是指编码器的位置。
Q10:M系列关节电机可以手动转动吗?
A:有减速器,一般情况下转不动。需要借助力臂转动,因为有谐波减速器,想要转动需要较大的力。
联系我们