

Product Description

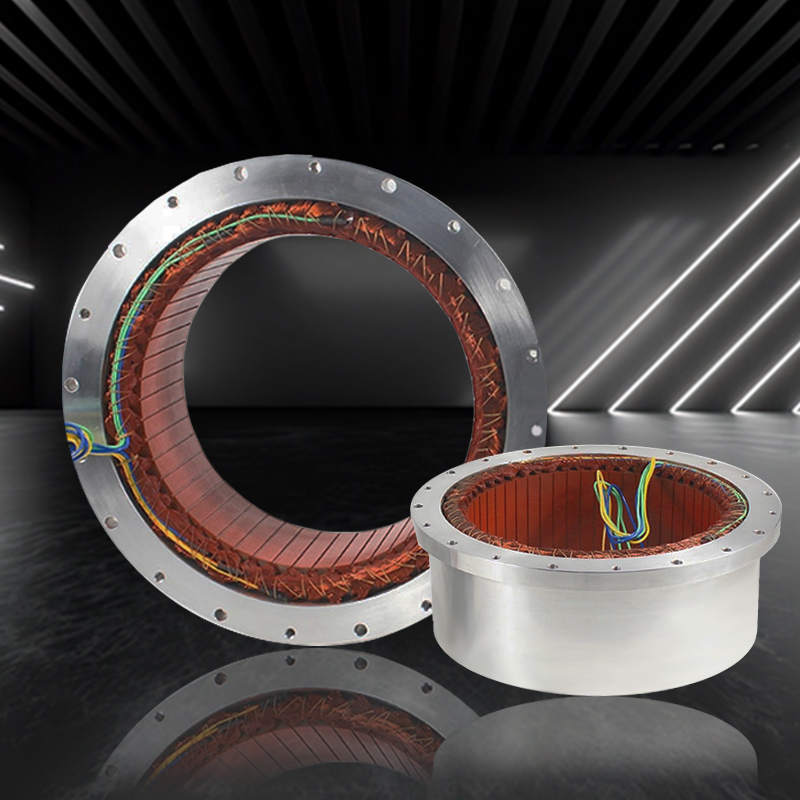
DC FRAMELESS TORQUE MOTOR
● High torque density
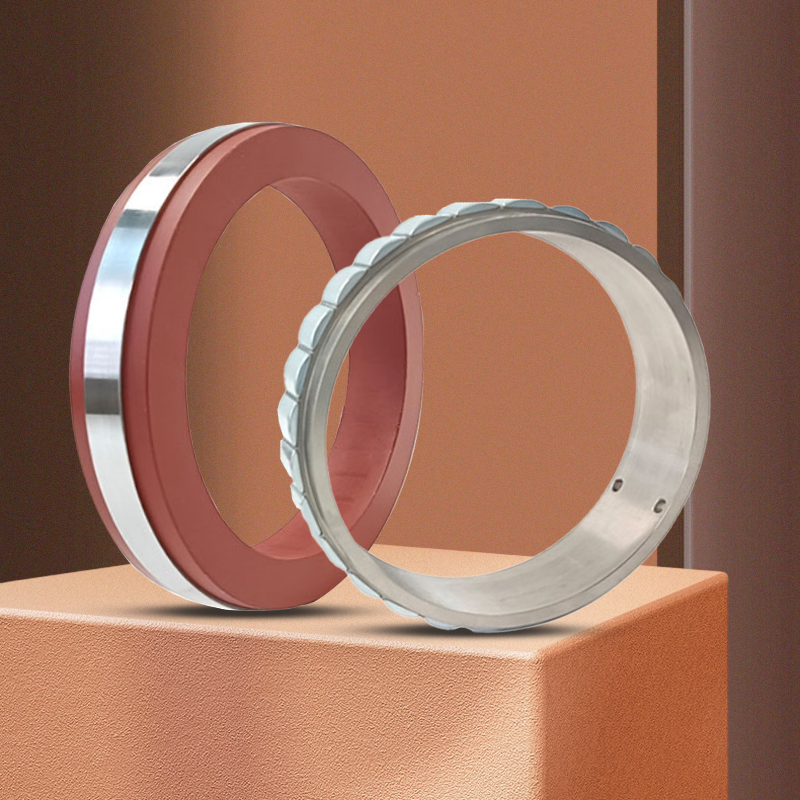
● Frameless compact design
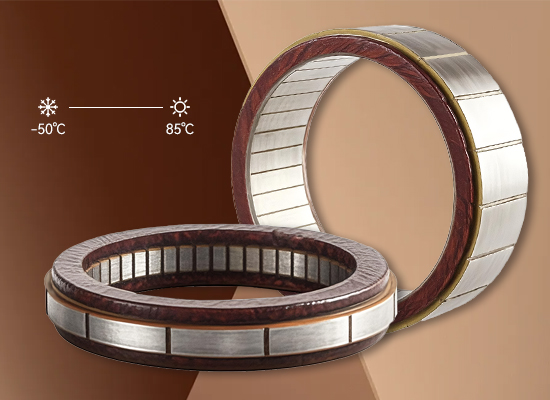
● Long lifespan and maintenance-free
● Technical support
The DC Torque Motor is a special type of permanent magnet brushless synchronous motor. Since the load is directly connected to the rotor and no transmission components are required, the torque motor belongs to the direct drive technology. Torque motors are also a type of "frameless" motor. That is to say, the motor has no casing, bearings or measurement system. These components are selected by the machine manufacturer based on the required performance or purchased as a set.
Functional Features
This structural design of the motor has the following prominent advantages:
The sinusoidal back electromotive force has a low harmonic content. The typical design value of the harmonic content is approximately 2.5% for the third harmonic and 0.3% for the fifth harmonic.
• There is no cogging torque fluctuation;
The torque/current linear range is wide and the linearity is high.
High torque density;
Ultra-low hysteresis damping torque;
Ultra-low inductance, small electrical time constant, and fast dynamic response;
• Low requirement for the coaxiality of the stator and rotor installation;

High-performance drive, precise control
High torque density
Zero cogging effect
Low inertia, high dynamic response
High-precision positioning
Compact frameless design, space-saving
Structure without shell
Modular customization
Lightweighting

Widely compatible and rich in application scenarios
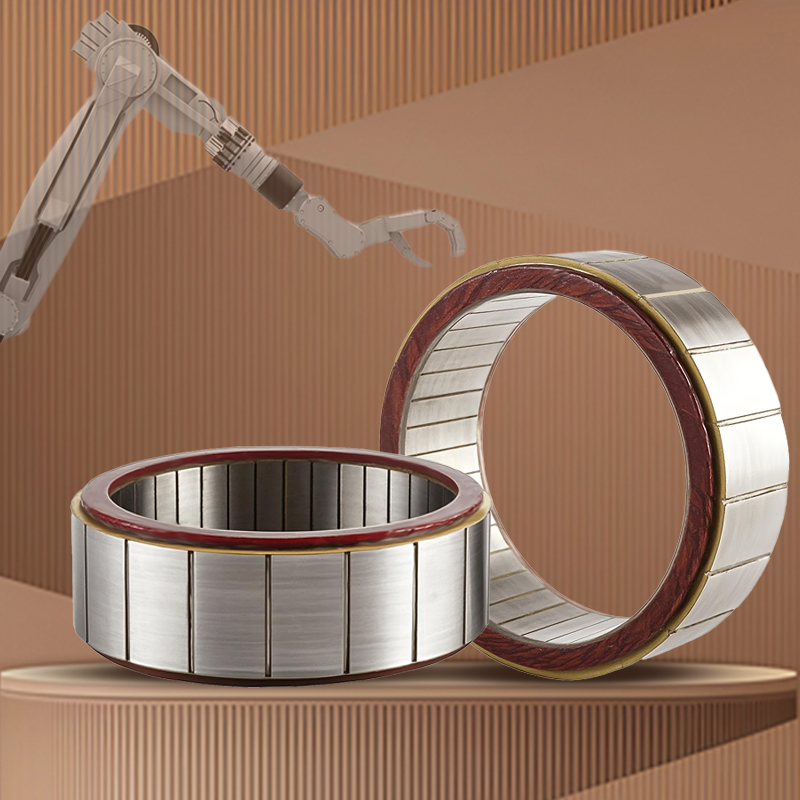
Industrial automation
Medical equipment
Aerospace & Military Industry
Semiconductors & Precision Instruments
Application
Robot joints (collaborative robots, bionic robots), aerospace servos, precision medical equipment, semiconductor processing, industrial automation fields, new energy and automation fields, unmanned aerial vehicle propulsion systems, etc.

Model Description
█ Naming rule | |||||||||
Y | T | (N) | 28 | - | 12 | - | A | ||
┊ | ┊ | ┊ | ┊ | ┊ | ┊ | ||||
1 | 2 | 3 | 4 | 5 | 6 | ||||
1、Motor series 2、Torque motor 3、Pole logarithm adjustment | |||||||||
Product parameters
■ Product parameters 1 | |||||||
Motor model | YT28-12-A | YT32-40-A | YT35-40-A | YT35-40-B | YTN40-04-A | YTN40-07-A | YTN40-09-A |
Voltage (V) | 27 | 48 | 48 | 48 | 27 | 27 | 27 |
No-load speed (rpm) | 8000 | 10000 | 4200 | 11000 | 5200 | 3300 | 1700 |
Continuous locked rotor current (Arms) | 1.75 | 3 | 1.6 | 3 | 0.8 | 0.8 | 0.6 |
Continuous locked-rotor torque (Nm) | 0.06 | 0.13 | 0.2 | 0.12 | 0.04 | 0.07 | 0.085 |
Peak locked-rotor current (Arms) | 3.5 | 12 | 6.4 | 12 | 3.2 | 3.2 | 2.4 |
Peak locked-rotor torque (Nm) | 0.12 | 0.5 | 0.8 | 0.48 | 0.16 | 0.28 | 0.34 |
Torque coefficient (Nm/Arms) | 0.034 | 0.043 | 0.125 | 0.04 | 0.05 | 0.088 | 0.142 |
Line resistance (Ω) | 1.1 | 0.8 | 2.3 | 0.5 | 3 | 3.5 | 8.5 |
Wire inductance (mH) | 0.16 | 1 | 2.6 | 0.35 | 0.65 | 1.1 | 2.7 |
Moment of inertia (kg*m ²) | 1.1E-06 | 1.1E-06 | 4.1E-06 | 4.1E-06 | 1.7E-06 | 3.2E-06 | 3.2E-06 |
Weight (g) | 45 | 220 | 240 | 240 | 46 | 70 | 78 |
Polar logarithm p | 8 | 2 | 4 | 4 | 8 | 8 | 8 |
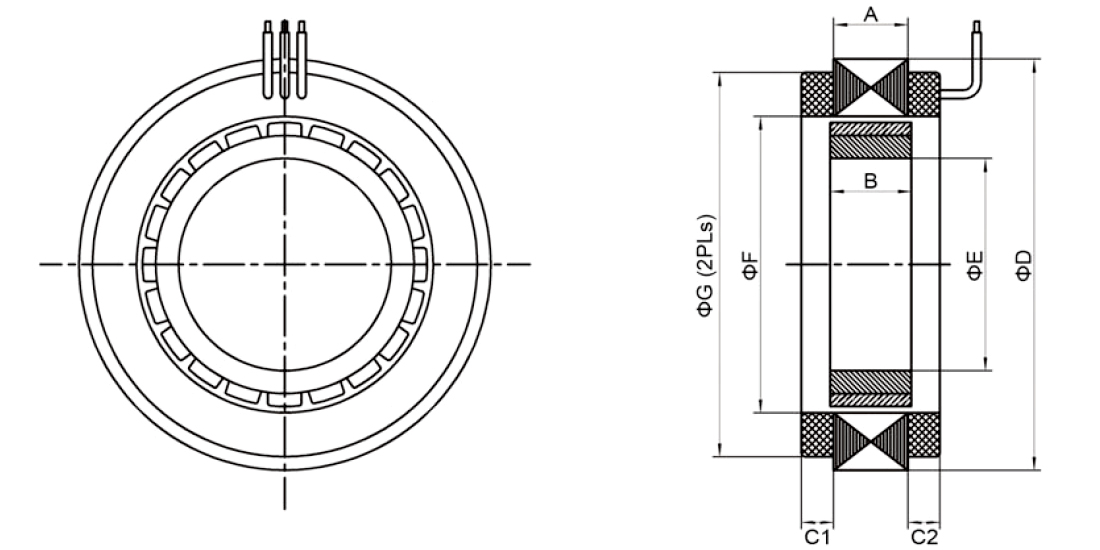
■ External dimensions 1 |
Motor model | YT28-12-A | YT32-40-A | YT35-40-A | YT35-40-B | YTN40-04-A | YTN40-07-A | YTN40-09-A |
A(mm) | 12.4 | 41 | 39 | 39 | 5 | 8 | 10 |
B(mm) | 12.5 | 42 | 40 | 40 | 6 | 11 | 11 |
C1(mm) | 2.5 | 6.5 | 3 | 3 | 3.2 | 3.2 | 3.2 |
C2(mm) | 3.5 | 6.5 | 3.5 | 3.5 | 3.2 | 3.2 | 3.2 |
D(mm) | 28 | 32 | 35 | 35 | 40 | 40 | 40 |
E(mm) | 13 | 7.6 | 10 | 10 | 18 | 18 | 18 |
F(mm) | 20 | 14,6 | 20 | 20 | 27 | 27 | 27 |
G(mm) | 27 | 30 | 34 | 34 | 39 | 39 | 39 |
■ Product parameters 2 | |||||||
Motor model | YTN40-15-A | YTN⁴0-32-B | YT45-40-A | YT45-40-B | YT46-13-A | YT60-08-A | YT60-08-B |
Voltage (V) | 27 | 36 | 48 | 220° | 27 | 27 | 24 |
No-load speed (rpm) | 2200 | 3600 | 9000 | 11500 | 1500 | 2500 | 800 |
Continuous locked rotor current (Arms) | 1 | 3.2 | 7 | 2 | 1 | 2 | 0.7 |
Continuous locked-rotor torque (Nm) | 0.12 | 0.28 | 0.4 | 0.4 | 0.19 | 0.2 | 0.2 |
Peak locked-rotor current (Arms) | 5 | 9.6 | 28 | 8 | 3 | 8 | 1.4 |
Peak locked-rotor torque (Nm) | 0.56 | 0.84 | 1.6 | 1.6 | 0.57 | 0.8 | 0.4 |
Torque coefficient (Nm/Arms) | 0.12 | 0.088 | 0.057 | 0.2 | 0.19 | 0.1 | 0.286 |
Line resistance (Ω) | 3.4 | 0.65 | 0.27 | 2.4 | 5.2 | 1.7 | 13 |
Wire inductance (mH) | 1.4 | 0.35 | 0.19 | 2.4 | 2 | 1.3 | 9 |
Moment of inertia (kg*m ²) | 4.9E-06 | 9.8E-06 | 1.4E-05 | 1.4E-05 | 8.7E-06 | 9.8E-06 | 9.8E-06 |
Weight (g) | 125 | 230 | 420 | 420 | 140 | 190 | 190 |
Polar logarithm p | 8 | 8 | 4 | 4 | 10 | 5 | 5 |
■ External dimensions 2 |
Motor model | YTN40-15-A | YTN40-32-B | YT45-40-A | YT45-40-B | YT46-13-A | YT60-08-A | YT60-08-B |
A(mm) | 16 | 33 | 41 | 41 | 13.7 | 9.5 | 9.5 |
B(mm) | 17 | 34 | 45 | 45 | 14 | 9.5 | 9.5 |
C1(mm) | 3.2 | 3.2 | 5 | 5 | 3 | 4 | 4 |
C2(mm) | 3.2 | 4.2 | 5 | 5 | 3.5 | 4.5 | 4.5 |
D(mm) | 40 | 40 | 45 | 45 | 46 | 60 | 60 |
E(mm) | 18 | 18 | 16 | 16 | 20 | 24 | 24 |
F(mm) | 27 | 27 | 27 | 27 | 32 | 37 | 37 |
G(mm) | 39 | 39 | 43 | 43 | 45 | 57 | 57 |
■ Product parameters 3 | |||||||
Motor model | YT60-14-0A | YT60-14A | YT60-14-B | YT60-23-C | YTN⁶0-06-A | YTN60-10-0A | YTN60-10-A |
Voltage (V) | 310* | 27 | 24 | 48 | 27 | 27 | 48 |
No-load speed (rpm) | 8000 | 1400 | 3800 | 5500 | 1400 | 750 | 4000 |
Continuous locked rotor current (Arms) | 1 | 2 | 6.5 | 7 | 0.8 | 0.8 | 2.4 |
Continuous locked-rotor torque (Nm) | 0.4 | 0.4 | 0.4 | 0.55 | 0.16 | 0.28 | 0.28 |
Peak locked-rotor current (Arms) | 4 | 7 | 26 | 28 | 3.2 | 2.4 | 7.2 |
Peak locked-rotor torque (Nm) | 1.6 | 1.4 | 1.6 | 2.2 | 0.64 | 0.84 | 0.84 |
Torque coefficient (Nm/Arms) | 0.4 | 0.2 | 0.062 | 0.079 | 0.2 | 0.35 | 0.117 |
Line resistance (Ω) | 11 | 2.8 | 0.35 | 0.24 | 6.2 | 9.2 | 1 |
Wire inductance (mH) | 10 | 3 | 0.35 | 0.32 | 3.2 | 6.4 | 0.7 |
Moment of inertia (kg*m ²) | 1.5E-05 | 1.5E-05 | 1.5E-05 | 2.6E-05 | 1.1E-05 | 1.7E-05 | 1.7E-05 |
Weight (g) | 280 | 280 | 280 | 430 | 120 | 185 | 185 |
Polar logarithm p | 5 | 5 | 5 | 5 | 10 | 10 | 10 |
■ External dimensions 3 |
Motor model | YT60-14-0A | YT60-14A | YT60-14-B | YT60-23-C | YTN60-06-A | YTN60-10-0A | YTN60-10-A |
A(mm) | 15 | 15 | 15 | 24 | 7 | 11 | 11 |
B(mm) | 15 | 15 | 15 | 25 | 7 | 11 | 11 |
C1(mm) | 4 | 4 | 4 | 4 | 3.5 | 3.5 | 3.5 |
C2(mm) | 4.5 | 4.5 | 4.5 | 4.5 | 3.5 | 3.5 | 3.5 |
D(mm) | 60 | 60 | 60 | 60 | 60 | 60 | 60 |
E(mm) | 24 | 24 | 24 | 24 | 30 | 30 | 30 |
F(mm) | 37 | 37 | 37 | 37 | 42 | 42 | 42 |
G(mm) | 57 | 57 | 57 | 57 | 58 | 58 | 58 |
■ Product parameters 4 | |||||||
Motor model | YTN60-14-A | YTN⁶0-14-B | YTN60-40-B | YTN60-40-D | YTN65-05-A | YTN65-10-A | YT67-05-A |
Voltage (V) | 27 | 48 | 500* | 300° | 27 | 27 | 27 |
No-load speed (rpm) | 950 | 4000 | 13000 | 11500 | 2200 | 1150 | 2400 |
Continuous locked rotor current (Arms) | 1 | 2.5 | 2.5 | 3.8 | 1 | 1 | 1 |
Continuous locked-rotor torque (Nm) | 0.3 | 0.3 | 1 | 1 | 0.1 | 0.2 | 0.1 |
Peak locked-rotor current (Arms) | 4 | 10 | 10 | 15.2 | 4 | 4 | 4 |
Peak locked-rotor torque (Nm) | 1.2 | 1.2 | 4 | 4 | 0.5 | 0.9 | 0.5 |
Torque coefficient (Nm/Arms) | 0.3 | 0.12 | 0.4 | 0.263 | 0.12 | 0.23 | 0.14 |
Line resistance (Ω) | 3.8 | 0.7 | 2 | 0.9 | 3 | 2.4 | 2.4 |
Wire inductance (mH) | 3.4 | 0.55 | 2.4 | 1.2 | 0.65 | 1.3 | 0.42 |
Moment of inertia (kg*m ²) | 2.3E-05 | 2.3E-05 | 6.6E-05 | 6.6E-05 | 1.9E-05 | 3.3E-05 | 2.1E-05 |
Weight (g) | 240 | 240 | 630 | 630 | 110 | 180 | 100 |
Polar logarithm p | 10 | 10 | 10 | 10 | 11 | 11 | 11 |
■ External dimensions 4 |
Motor model | YTN60-14-A | YTN60-14-B | YTN60-40-B | YTN60-40-D | YTN65-05-A | YTN65-10-A | YT67-05-A |
A(mm) | 15 | 15 | 41 | 41 | 6 | 11 | 5.5 |
B(mm) | 15 | 15 | 43 | 43 | 6 | 11 | 6 |
C1(mm) | 3.5 | 3.5 | 4 | 4 | 5 | 5 | 2.7 |
C2(mm) | 3.5 | 3.5 | 4 | 4 | 5 | 5 | 2.7 |
D(mm) | 60 | 60 | 60 | 60 | 65 | 65 | 67 |
E(mm) | 30 | 30 | 30 | 30 | 40 | 40 | 43 |
F(mm) | 42 | 42 | 42 | 42 | 52 | 52 | 54 |
G(mm) | 58 | 58 | 58 | 58 | 63 | 63 | 65 |
■ Product parameters 5 | |||||||
Motor model | YT75-08-A | YT⁷5-08-B | YT⁷5-15-A | YT75-15-B | YT75-19-A | YT85-10-A | YT85-10-B |
Voltage (V) | 27 | 48 | 27 | 48 | 48 | 27 | 48 |
No-load speed (rpm) | 1150 | 3900 | 660 | 2200 | 750 | 850 | 2400 |
Continuous locked rotor current (Arms) | 1.5 | 2.8 | 1.5 | 2.8 | 1.2 | 2 | 3.1 |
Continuous locked-rotor torque (Nm) | 0.35 | 0.35 | 0.65 | 0.65 | 0.85 | 0.65 | 0.65 |
Peak locked-rotor current (Arms) | 5.4 | 14 | 3.75 | 14 | 3.6 | 7 | 15.5 |
Peak locked-rotor torque (Nm) | 1.2 | 1.5 | 1.65 | 3.2 | 2.5 | 2.2 | 3.2 |
Torque coefficient (Nm/Arms) | 0.233 | 0.125 | 0.433 | 0.232 | 0.708 | 0.325 | 0.21 |
Line resistance (Ω) | 4.2 | 1.1 | 5.2 | 1.4 | 10.2 | 3.3 | 1.4 |
Wire inductance (mH) | 4 | 1.1 | 4.8 | 2 | 14 | 3.8 | 1.7 |
Moment of inertia (kg*m ²) | 2.6E-05 | 2.6E-05 | 4.7E-05 | 4.7E-05 | 5.9E-05 | 6.6E-05 | 6.6E-05 |
Weight (g) | 290 | 290 | 460 | 460 | 560 | 430 | 430 |
Polar logarithm p | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
■ External dimensions 5 |
Motor model | YT75-08-A | YT75-08-B | YT75-15-A | YT75-15-B | YT75-19-A | YT85-10-A | YT85-10-B |
A(mm) | 9 | 9 | 16 | 16 | 20 | 11 | 11 |
B(mm) | 9 | 9 | 16 | 16 | 20 | 11 | 11 |
C1(mm) | 4.5 | 4.5 | 4.5 | 4.5 | 4.5 | 4.5 | 4.5 |
C2(mm) | 5.5 | 5.5 | 5.5 | 5.5 | 5.5 | 6.5 | 6.5 |
D(mm) | 75 | 75 | 75 | 75 | 75 | 85 | 85 |
E(mm) | 32 | 32 | 32 | 32 | 32 | 34 | 34 |
F(mm) | 48 | 48 | 48 | 48 | 48 | 56 | 56 |
G(mm) | 70 | 70 | 70 | 70 | 70 | 78 | 78 |
■ Product parameters 6 | |||||||
Motor model | YT85-17-A | YT85-17-B | YT85-17-D | YT85-50-A | YTN85-05-A | YTN85-15-0A | YTN85-15-A |
Voltage (V) | 27 | 48 | 48 | 48 | 27 | 24 | 24 |
No-load speed (rpm) | 550 | 1450 | 4500 | 2200 | 920 | 400 | 1600 |
Continuous locked rotor current (Arms) | 2 | 3.1 | 10 | 14 | 0.8 | 1 | 4 |
Continuous locked-rotor torque (Nm) | 1.1 | 1.1 | 1 | 3.2 | 0.26 | 0.6 | 0.6 |
Peak locked-rotor current (Arms) | 5 | 15.5 | 40 | 42 | 2 | 2.5 | 16 |
Peak locked-rotor torque (Nm) | 2.7 | 5.5 | 4 | 9.6 | 0.65 | 1.5 | 2.4 |
Torque coefficient (Nm/Arms) | 0.55 | 0.355 | 0.1 | 0.229 | 0.325 | 0.6 | 0.15 |
Line resistance (Ω) | 4 | 1.7 | 0.19 | 0.18 | 8.2 | 7 | 0.46 |
Wire inductance (mH) | 4.2 | 2.9 | 0.23 | 0.32 | 1.9 | 3.4 | 0.2 |
Moment of inertia (kg*m ²) | 1.1E-04 | 1.1E-04 | 1.1E-04 | 3.1E-04 | 7.1E-04 | 1.9E-04 | 1.9E-04 |
Weight (g) | 700 | 700 | 700 | 1350 | 200 | 450 | 450 |
Polar logarithm p | 5 | 5 | 5 | 5 | 11 | 11 | 11 |
■ External dimensions 6 |
Motor model | YT85-17-A | YT85-17-B | YT85-17-D | YT85-50-A | YTN85-05-A | YTN85-15-0A | YTN85-15-A |
A(mm) | 18 | 18 | 18 | 51 | 6 | 16 | 16 |
B(mm) | 18 | 18 | 18 | 51 | 6 | 16 | 16 |
C1(mm) | 4.5 | 4.5 | 4.5 | 4.5 | 3 | 3 | 3 |
C2(mm) | 6.5 | 6.5 | 6.5 | 6.5 | 4 | 4 | 4 |
D(mm) | 85 | 85 | 85 | 85 | 85 | 85 | 85 |
E(mm) | 34 | 34 | 34 | 34 | 52 | 52 | 52 |
F(mm) | 56 | 56 | 56 | 56 | 70 | 70 | 70 |
G(mm) | 78 | 78 | 78 | 78 | 83 | 83 | 83 |
■ Product parameters 7 | |||||||
Motor model | YTN85-20-A | YT92-10-A | YT92-16-A | YT100-100-A | YTN100-10-A | YT110-08-A | YT110-08-B |
Voltage (V) | 48 | 27 | 24 | 310* | 27 | 48 | 48 |
No-load speed (rpm) | 4100 | 500 | 270 | 4300 | 300 | 500 | 1300 |
Continuous locked rotor current (Arms) | 7.6 | 1.9 | 1.8 | 11 | 1.1 | 1 | 2.6 |
Continuous locked-rotor torque (Nm) | 1 | 1.1 | 1.5 | 8.4 | 1 | 1 | 0.95 |
Peak locked-rotor current (Arms) | 22.8 | 4.2 | 3.6 | 22 | 2.2 | 3.5 | 10.4 |
Peak locked-rotor torque (Nm) | 3 | 2.4 | 3 | 16.8 | 2 | 3.5 | 3.8 |
Torque coefficient (Nm/Arms) | 0.132 | 0.579 | 0.833 | 0.764 | 0.909 | 1 | 0.365 |
Line resistance (Ω) | 0.18 | 4.8 | 5 | 0.45 | 10.5 | 11 | 1.5 |
Wire inductance (mH) | 0.1 | 6.8 | 10.5 | 2.2 | 6 | 8 | 1.4 |
Moment of inertia (kg*m ²) | 2.5E-04 | 8.8E-05 | 1.3E-04 | 8.8E-04 | 1.8E-04 | 2.1E-04 | 2.1E-04 |
Weight (g) | 580 | 450 | 660 | 4820 | 640 | 500 | 500 |
Polar logarithm p | 11 | 10 | 10 | 5 | 22 | 11 | 11 |
■ External dimensions 7 |
Motor model | YTN85-20-A | YT92-10-A | YT92-16-A | YT100-100-A | YTN100-10-A | YT110-08-A | YT110-08-B |
A(mm) | 21 | 11 | 17 | 101 | 11 | 9 | 9 |
B(mm) | 21 | 12 | 18 | 101 | 11 | 9 | 9 |
C1(mm) | 3 | 4 | 4 | 6 | 4 | 5 | 5 |
C2(mm) | 4 | 5 | 5 | 8 | 5 | 5.5 | 5.5 |
D(mm) | 85 | 92 | 92 | 100 | 100 | 110 | 110 |
E(mm) | 52 | 50 | 50 | 40 | 65 | 66 | 66 |
F(mm) | 70 | 64 | 64 | 62 | 80 | 85 | 85 |
G(mm) | 83 | 89 | 89 | 91 | 98 | 105 | 105 |
■ Product parameters 8 | |||||||
Motor model | YT110-16-A | YT110-16-B | YT110-20-A | YT110-30-A | YT118-23-A | YT140-06-A | YT140-12-A |
Voltage (V) | 27 | 48 | 48 | 27 | 28 | 24 | 24 |
No-load speed (rpm) | 650 | 280 | 660 | 200 | 220 | 220 | 180 |
Continuous locked rotor current (Arms) | 5.5 | 1.4 | 4 | 3.5 | 2.9 | 1.3 | 1.8 |
Continuous locked-rotor torque (Nm) | 2.4 | 2.4 | 3 | 4.8 | 4.25 | 1.4 | 2.4 |
Peak locked-rotor current (Arms) | 22 | 2.8 | 16 | 7 | 5.8 | 1.7 | 3.6 |
Peak locked-rotor torque (Nm) | 9.6 | 9.6 | 12 | 9.6 | 8.5 | 1.8 | 4.8 |
Torque coefficient (Nm/Arms) | 0.436 | 1.714 | 0.75 | 1.371 | 1.466 | 1.077 | 1.333 |
Line resistance (Ω) | 0.7 | 13 | 1.6 | 2.7 | 3.2 | 9 | 5.5 |
Wire inductance (mH) | 1 | 16 | 2.2 | 5 | 3.2 | 10.5 | 6 |
Moment of inertia (kg*m ²) | 4.3E-04 | 4.3E-04 | 5.0E-04 | 7.6E-04 | 5.2E-04 | 4.7E-04 | 8.7E-04 |
Weight (g) | 840 | 840 | 980 | 1450 | 800 | 510 | 830 |
Polar logarithm p | 11 | 11 | 11 | 11 | 23 | 16 | 16 |
■ External dimensions 8 |
Motor model | YT110-16-A | YT110-16-B | YT110-20-A | YT¹10-30-A | YT118-23-A | YT140-06-A | YT140-12-A |
A(mm) | 17 | 17 | 21 | 31 | 24 | 7 | 13 |
B(mm) | 18 | 18 | 21 | 32 | 25 | 7 | 13 |
C1(mm) | 5 | 5 | 5 | 5 | 4 | 4.5 | 4.5 |
C2(mm) | 5.5 | 5.5 | 5.5 | 5.5 | 4 | 4.5 | 4.5 |
D(mm) | 110 | 110 | 110 | 110 | 118 | 140 | 140 |
E(mm) | 66 | 66 | 66 | 66 | 91 | 97 | 97 |
F(mm) | 85 | 85 | 85 | 85 | 100 | 116 | 116 |
G(mm) | 105 | 105 | 105 | 105 | 117 | 134 | 134 |
■ Product parameters 9 | ||||||
Motor model | YT140-18-A | YT140-40-A | YT175-18-A | YT175-40-A | YT200-16-A | YT200-25-A |
Voltage (V) | 24 | 24 | 27 | 27 | 24 | 24 |
No-load speed (rpm) | 175 | 180 | 200 | 110 | 120 | 110 |
Continuous locked rotor current (Arms) | 2.8 | 6.7 | 5 | 6 | 5.6 | 7.5 |
Continuous locked-rotor torque (Nm) | 4.2 | 10 | 7.5 | 15 | 10 | 16 |
Peak locked-rotor current (Arms) | 5.6 | 13.4 | 10 | 12 | 11.2 | 15 |
Peak locked-rotor torque (Nm) | 8.4 | 20 | 15 | 30 | 20 | 32 |
Torque coefficient (Nm/Arms) | 1.5 | 1.493 | 1.5 | 2.5 | 1.786 | 2.133 |
Line resistance (Ω) | 3 | 1 | 1.4 | 1.5 | 1.7 | 1.3 |
Wire inductance (mH) | 5 | 2.4 | 2.4 | 5.6 | 3 | 2.6 |
Moment of inertia (kg*m ²) | 0.3E-03 | 2.7E-03 | 3.4E-03 | 7.2E-03 | 4.3E-03 | 6.5E-03 |
Weight (g) | 1200 | 2250 | 2260 | 4630 | 1920 | 2750 |
Polar logarithm p | 16 | 16 | 11 | 11 | 22 | 22 |
■ External dimensions 9 |
Motor model | YT140-18-A | YT140-40-A | YT175-18-A | YT175-40-A | YT200-16-A | YT200-25-A |
A(mm) | 19 | 41 | 19 | 41 | 17 | 26 |
B(mm) | 20 | 41 | 19 | 41 | 18 | 27 |
C1(mm) | 4.5 | 4.5 | 6 | 6 | 5 | 5 |
C2(mm) | 4.5 | 4.5 | 6 | 6 | 6 | 6 |
D(mm) | 140 | 140 | 175 | 175 | 200 | 200 |
E(mm) | 97 | 97 | 110 | 110 | 150 | 150 |
F(mm) | 116 | 116 | 140 | 140 | 170 | 170 |
G(mm) | 134 | 134 | 167 | 167 | 197 | 197 |
■ Product parameters 10 | ||||||
Motor model | YT230-19-A | YT230-19-B | YT230-40-A | YT256-20-A | YT256-48-A | YT270-25-A |
Voltage (V) | 48 | 24 | 48 | 48 | 48 | 48 |
No-load speed (rpm) | 220 | 110 | 120 | 130 | 80 | 100 |
Continuous locked rotor current (Arms) | 5 | 5 | 7 | 5 | 8 | 3.6 |
Continuous locked-rotor torque (Nm) | 11 | 10 | 30 | 20 | 50 | 18 |
Peak locked-rotor current (Arms) | 10 | 10 | 21 | 10 | 16 | 9 |
Peak locked-rotor torque (Nm) | 22 | 20 | 90 | 40 | 100 | 44 |
Torque coefficient (Nm/Arms) | 2.2 | 2 | 4.286 | 4 | 6.25 | 5 |
Line resistance (Ω) | 1.4 | 1.5 | 1.9 | 2.7 | 2.2 | 4.2 |
Wire inductance (mH) | 3.9 | 2.8 | 8 | 8.7 | 10.5 | 7.6 |
Moment of inertia (kg*m ²) | 9.6E-03 | 9.6E-03 | 2.0E-00 | 1.4E-02 | 3.3E-02 | 1.7E-02 |
Weight (g) | 3420 | 3420 | 6360 | 3800 | 8320 | 3400 |
Polar logarithm p | 17 | 17 | 17 | 17 | 17 | 22 |
■ External dimensions 10 |
Motor model | YT230-19-A | YT230-19-B | YT230-40-A | YT256-20-A | YT256-48-A | YT270-25-A |
A(mm) | 20 | 20 | 41 | 21 | 50 | 26 |
B(mm) | 20 | 20 | 41 | 21 | 50 | 28 |
C1(mm) | 8 | 8 | 8 | 6 | 6 | 6 |
C2(mm) | 10 | 10 | 10 | 8 | 8 | 8 |
D(mm) | 230 | 230 | 230 | 256 | 256 | 270 |
E(mm) | 165 | 165 | 165 | 194 | 194 | 228 |
F(mm) | 193 | 193 | 193 | 219 | 219 | 244 |
G(mm) | 224 | 224 | 224 | 248 | 248 | 264 |
■ Product parameters 11 | ||||||
Motor model | YT286-20-A | YT286-27-A | YT286-44-A | YT286-50-A | YT286-100-A | YT295-25-A |
Voltage (V) | 48 | 48 | 48 | 48 | 80 | 48 |
No-load speed (rpm) | 160 | 110 | 80 | 60 | 80 | 66 |
Continuous locked rotor current (Arms) | 7 | 6.5 | 8 | 6 | 9 | 5.5 |
Continuous locked-rotor torque (Nm) | 20 | 30 | 45 | 50 | 90 | 43 |
Peak locked-rotor current (Arms) | 14 | 19.5 | 16 | 12 | 18 | 11 |
Peak locked-rotor torque (Nm) | 40 | 90 | 90 | 100 | 180 | 86 |
Torque coefficient (Nm/Arms) | 2.857 | 4.615 | 5.625 | 8.333 | 10 | 7.818 |
Line resistance (Ω) | 1.3 | 2 | 1.9 | 3.2 | 2.2 | 3.8 |
Wire inductance (mH) | 2.6 | 4.4 | 5.3 | 9 | 7.2 | 19 |
Moment of inertia (kg*m ²) | 2.3E-02 | 3.1E-02 | 5.1E-02 | 5.6E-02 | 1.1E-01 | 2.0E-02 |
Weight (g) | 3700 | 4800 | 7400 | 8300 | 15900 | 7100 |
Polar logarithm p | 22 | 22 | 22 | 22 | 22 | 24 |
■ External dimensions 11 |
Motor model | YT286-20-A | YT286-27-A | YT286-44-A | YT286-50-A | YT286-100-A | YT295-25-A |
A(mm) | 21 | 28 | 45 | 51 | 101 | 26 |
B(mm) | 21 | 28 | 46 | 51 | 101 | 28 |
C1(mm) | 6 | 6 | 6 | 6 | 6 | 7.5 |
C2(mm) | 8 | 8 | 8 | 8 | 8 | 8.5 |
D(mm) | 286 | 286 | 286 | 286 | 286 | 295 |
E(mm) | 233 | 233 | 233 | 233 | 233 | 211 |
F(mm) | 258 | 258 | 258 | 258 | 258 | 233 |
G(mm) | 279 | 279 | 279 | 279 | 279 | 283 |
■ Product parameters 12 | ||||||
Motor model | YT320-20-A | YT320-40-A | YTE320-40-A | YTE320-70-A | YT400-100-A | YT486-36-A |
Voltage (V) | 27 | 27 | 48 | 120 | 80 | 48 |
No-load speed (rpm) | 105 | 55 | 70 | 130 | 68 | 34 |
Continuous locked rotor current (Arms) | 14 | 14 | 16 | 20 | 25 | 14 |
Continuous locked-rotor torque (Nm) | 38 | 72 | 100 | 170 | 270 | 200 |
Peak locked-rotor current (Arms) | 35 | 25 | 32 | 40 | 60 | 25 |
Peak locked-rotor torque (Nm) | 95 | 130 | 200 | 340 | 620 | 350 |
Torque coefficient (Nm/Arms) | 2.714 | 5.143 | 6.25 | 8.5 | 10.8 | 14.286 |
Line resistance (Ω) | 0.7 | 1 | 0.9 | 0.75 | 0.56 | 1.6 |
Wire inductance (mH) | 1.8 | 3.5 | 12 | 14 | 4.9 | 13 |
Moment of inertia (kg*m ²) | 3.3E-02 | 6.4E-02 | 3.8E-02 | 6.6E-02 | 3.5E-01 | 2.3E-01 |
Weight (g) | 4700 | 8500 | 16200 | 26000 | 34000 | 20600 |
Polar logarithm p | 23 | 23 | 23 | 23 | 22 | 22 |
■ External dimensions 12
|
Motor model | YT320-20-A | YT320-40-A | YTE320-40-A | YTE320-70-A | YT400-100-A | YT486-36-A |
A(mm) | 21 | 41 | 41 | 71 | 101 | 37 |
B(mm) | 21 | 41 | 42 | 74 | 102 | 38 |
C1(mm) | 6 | 6 | 10 | 10 | 8.5 | 10 |
C2(mm) | 8 | 8 | 12 | 12 | 9.5 | 10 |
D(mm) | 322 | 322 | 320 | 320 | 400 | 486 |
E(mm) | 263 | 263 | 200 | 200 | 320 | 390 |
F(mm) | 288 | 288 | 230 | 230 | 350 | 420 |
G(mm) | 314 | 314 | 312 | 312 | 390 | 473 |
Application wiring diagram
█ Motor wiring definition |
|
The corresponding colors of the motors UVW are red, blue and yellow. Viewed from the lead-out end, the forward sequence is clockwise. |
Custom Process

Demand communication

Scheme design

Sample production

Mass production

After-sales service

Technical support
Service
Dedicated service, along the way
Warranty worry-free, extended repair, often return to promote optimization, peace of mind choice, all in control.

Online customer service Efficient logistics Deliver on time Quality Assurance Technical maintenance Manufacturer support
After-sale guarantee
After-sales service: We provide comprehensive after-sales technical support, if you encounter any problems in the process of use, the professional after-sales engineer team will respond quickly, through telephone, mail or remote assistance, to provide you with detailed solutions. We also provide regular return visits to our products to understand how they are used and to collect your feedback in order to continuously optimize our products and services. In addition, in strict accordance with the quality assurance policy, we provide free repair or replacement services for products with quality problems during the warranty period, so that you have no worries.