










产品描述
FPGA驱动设计,CAN2.0A总线,支持254个关节或I/O设备串联,两条串行总线一进一出

FPGA驱动设计,CAN2.0A总线,
支持254个关节或I/O设备串联,
两条串行总线一进一出
爆炸图
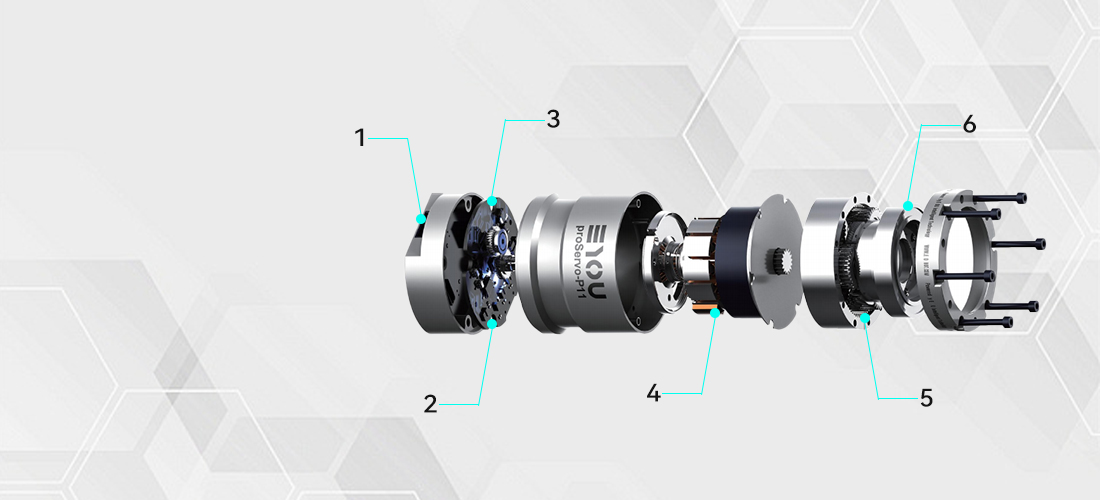
1. CAN2.0 总线
2. 全硬件FOC驱动
3. 机械式双编码器
4. 高密度无框力矩电机
5. 精密行星减速器
6. 4点接触轴承
人体关节模组

手腕关节 手肘关节
表情关节 脖子关节
手臂关节 肩膀关节
肩膀关节 手肘关节
膝盖关节
手肘关节 手臂关节
脖子关节 肩膀关节
软件和支持

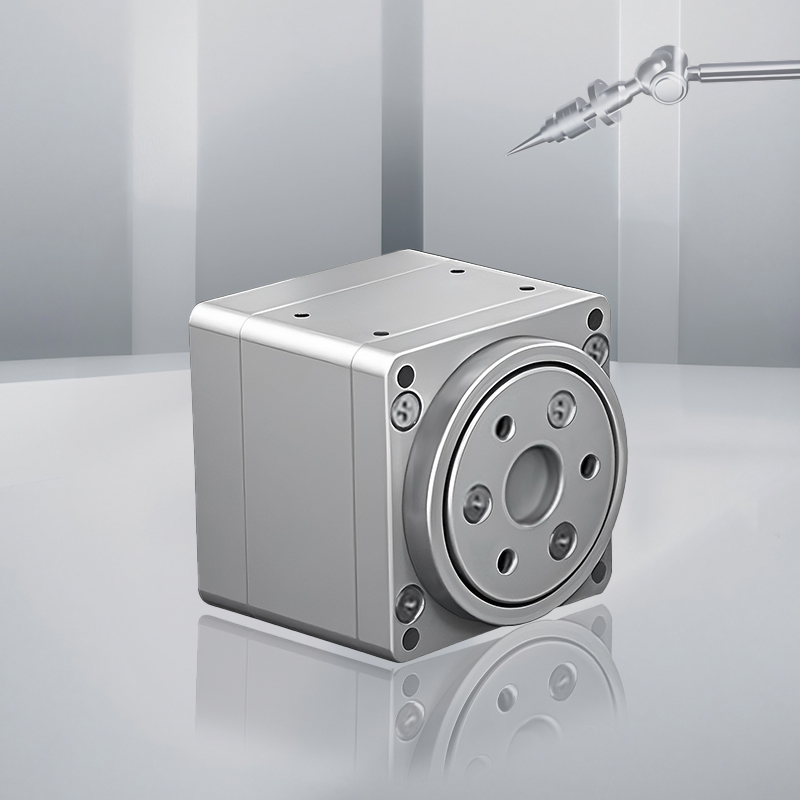
PP系列是新一代微型一体化柔性伺服关节,
内部集成高精度减速器,高能量密度力矩电机,高性能驱动,
产品集成度高、精度高、性能稳定,特别适用于仿生机器人、机械臂等产品。
提供UBUNTU和WINDOWS版上位机,方便用户快速验证。
同时提供C/C++API,可集成LINUX-(ROS)WINDOWS系统,
实现产品快速量产。
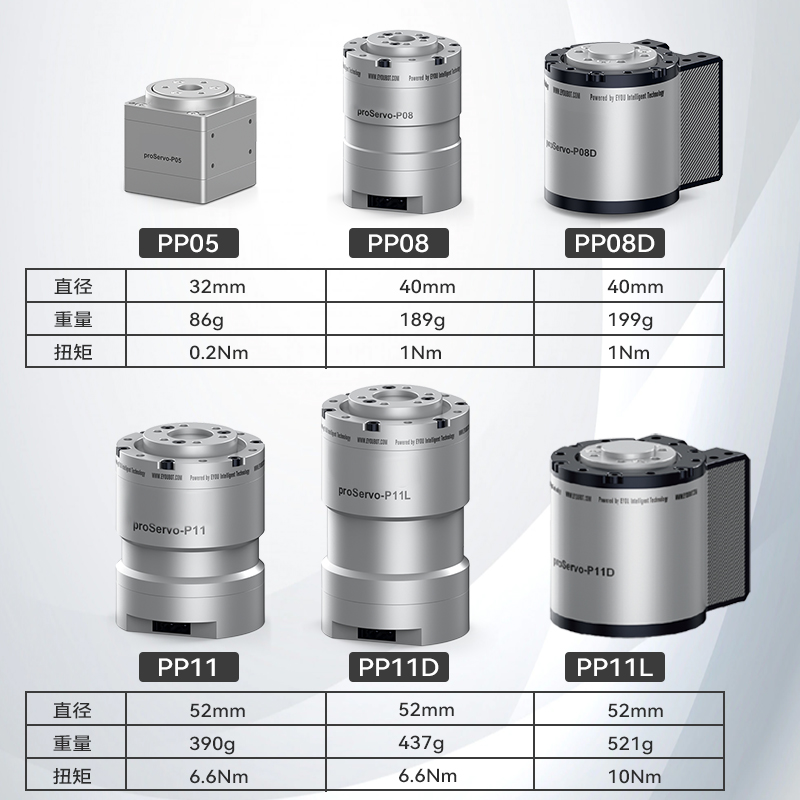
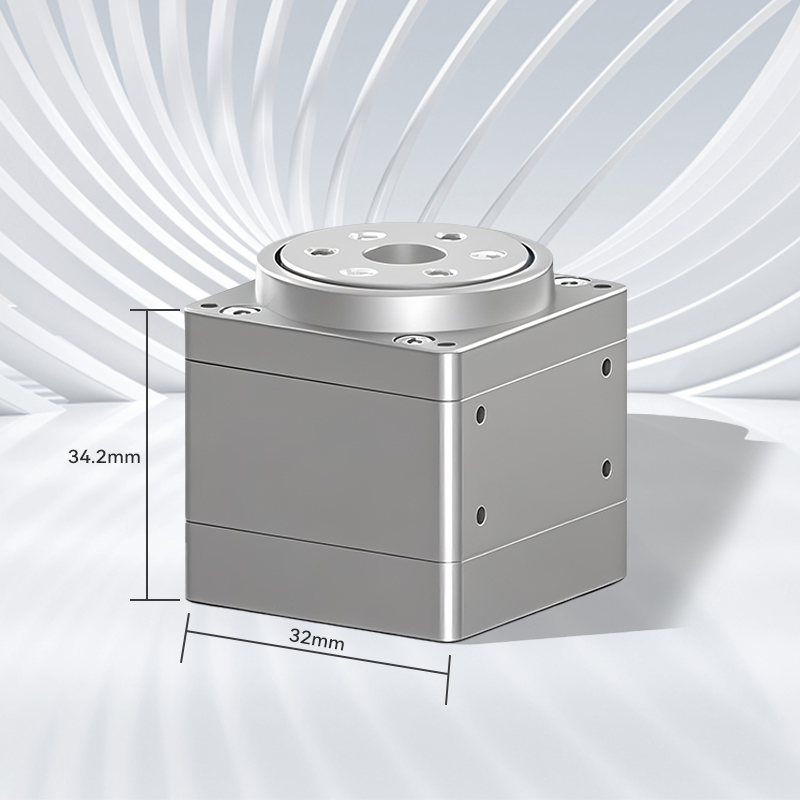
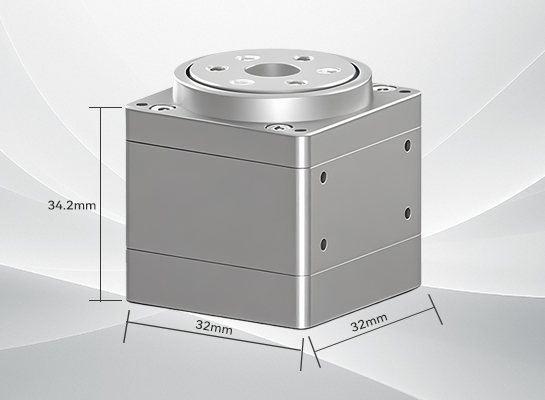
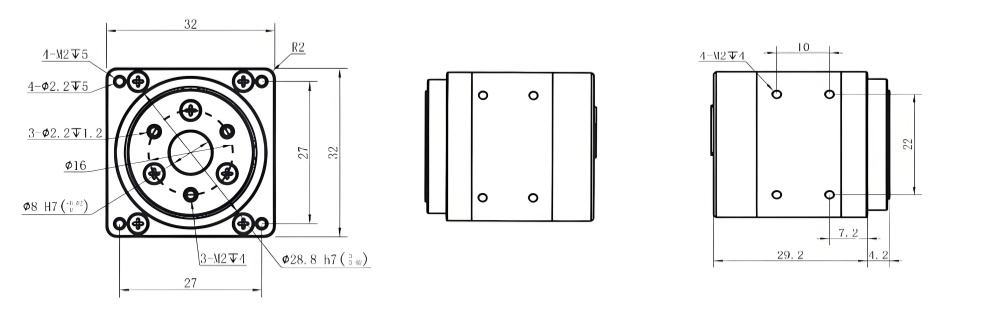
产品参数
型号 | PP05 | PP08 | PP08D | PP11 | PP11D | PP11L |
直径 | 32mm | 40mm | 40mm | 52mm | 52mm | 52mm |
长度 | 34.7mm | 56.4mm | 47.7mm | 67.6mm | 61.2mm | 84.3mm |
重量 | 86g | 189g | 199g | 390g | 437g | 521g |
减速比 | 6 | 36 | 36 | 36 | 36 | 36 |
额定功率 | 12W | 12W | 12W | 60W | 60W | 60W |
额定转速 | 50rpm | 50rpm | 50rpm | 50rpm | 50rpm | 50rpm |
额定扭矩 | 0.2Nm | 1.0Nm | 1.0Nm | 6.6Nm | 6.6Nm | 10Nm |
峰值扭矩 | 0.48Nm | 2.2Nm | 2.2Nm | 10Nm | 10Nm | 18Nm |
电机类型 | 无刷力矩电机 | |||||
工作噪音 | <60dB @ 1m | |||||
工作温度 | -20 - 80℃ | |||||
反向背隙 | 12 arcmin | |||||
编码器形式 | 双绝对值编码器 | |||||
工作电压 | 24V | |||||
防护等级 | IP54 | |||||
通信协议 | CAN | |||||
PP05
应用
适用于轻量化机器人关节、精密仪器转向、小型自动化设备,提升扭矩输出与运动精度,适配86g自重设计。

服务
1. 是否支持减速比定制?
该系列减速比提供6:1 和36:1。有如特殊需求,可定制或者推荐店铺其他产品。
2. 单编码器和双编码器版本有什么区别?
单编码器版本监测电机端转动,适用于一般精度要求场合;双编码器版本同时监测电机端和输出端,能有效补偿齿隙和弹性误差,适用于高精度控制和安全要求高的应用(如协作机器人、医疗设备)。该系列提供18bit的双编码器。
3. 关节模组可以支持哪些通讯接口?
标准版支持模拟量控制(电流/电压指令)或脉冲指令控制;
该系列支持CAN总线协议,可提供定制或者其他型号建议。
4. 是否支持驱控一体?可以直接连接控制器吗?
我们提供可选的驱控一体版关节模组,内置电机驱动器和位置伺服控制器,
用户可直接通过总线或脉冲接口控制,无需外接独立驱动器,简化布线和系统集成。
5. 有标准的3D模型文件可以下载吗?
有的。我们为所有型号提供STEP格式的三维模型文件,便于客户快速进行机械设计集成。
如需获取,请联系我们销售人员获取下载链接或资料包。
6. 关节模组是否可以空心设计?能走线吗?
该型号有空心轴和实心设计,中心孔径可用于走线、走气管、水管等,便于实现复杂末端执行器的功能布局。
具体中心孔径尺寸请参考型号选型表或咨询客服。
7. 标准交期和定制交期多久?
标准型号交期:通常为7-14个工作日。
定制需求(如IP56防水、减速比定制、通讯协议定制等)交期根据具体要求而定,一般5-10周。
8. 质保期多长?售后服务如何?
所有关节模组产品提供12个月质保期(正常使用情况下)。
我们提供远程技术支持,故障诊断指导,以及快速备件供应服务。质保期外也可提供有偿维修和维护服务。






