








 品牌官方供应商
13 年
品牌官方供应商
13 年



BlueROV2 水下机器人
BlueROV2水下无人机潜航器经济实惠高性能6推进器水下机器人
- 净重:9~11千克
- 净浮力:0.2千克
- 载重量:1.0千克
- 最大下潜深度:100米
CNY: 57198
ablity:月产值200
- 产品描述
- Product Params
产品描述
BlueROV2 水下机器人
产品描述
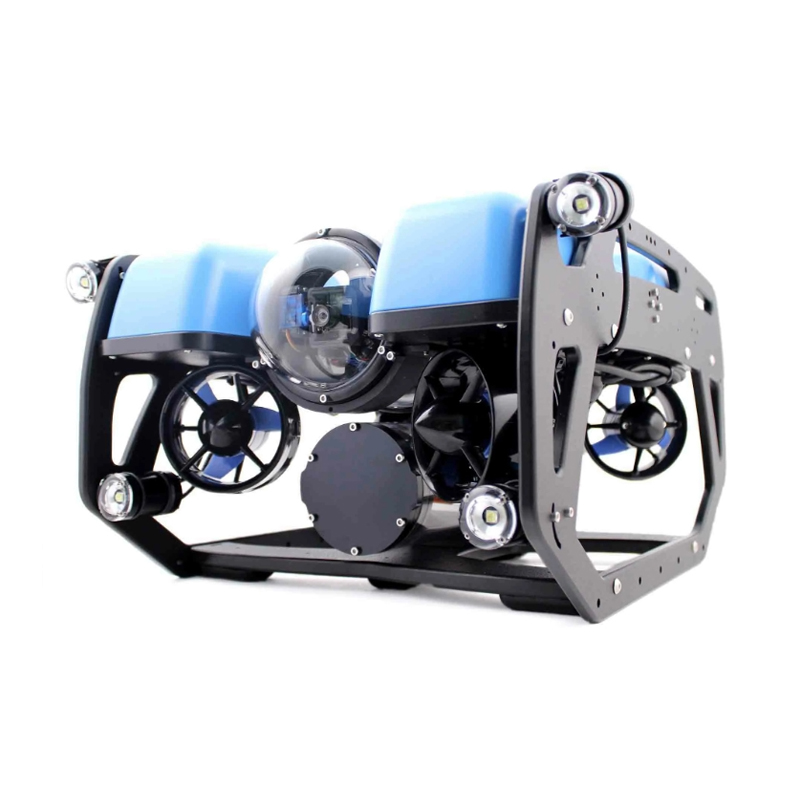
BlueROV2是世界上最经济实惠的高性能ROV。具有6推进器矢量配置。BlueROV2的电子设备和软件全部开源,具有足够的可扩展性,是检查,研究和冒险的理想ROV。
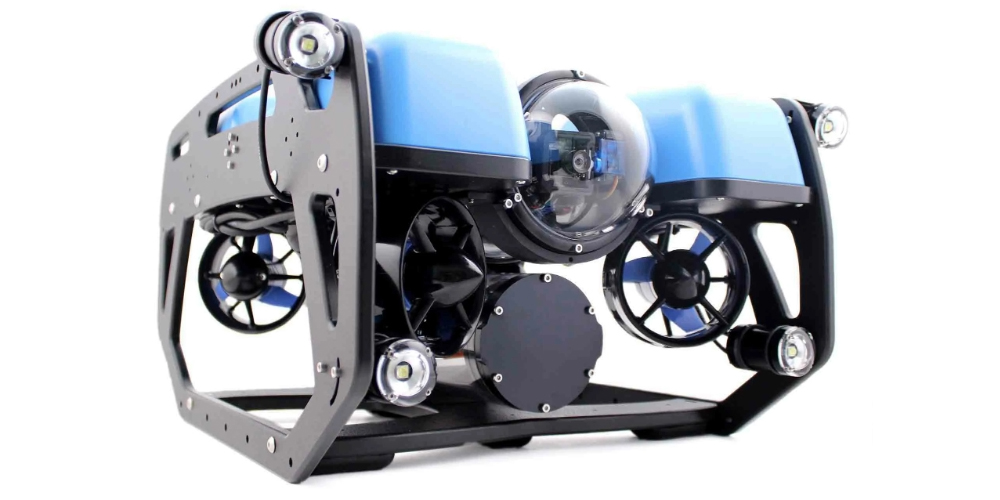
实时高清摄像机和照明
BlueROV2的前端安装了高清(1080p,30fps)广角微光摄像机。摄像头角度可以通过云台控制。使用单自由度云台时,即使ROV处于水平状态,操作员也可以通过云台控制摄像机的倾斜来向上或向下查找,BlueROV2还支持双通道云台拓展可以获取更广阔的视野。 ROV可以配置两个或四个可调光照明灯,最多可提供6,000流明的亮度,以照亮深水海洋。
矢量推进器配置和重型配置
ROV推进器使用矢量布置,具有高推力比,从而实现在任何方向上精确移动。ROV标准版带有6个推进器,重载版有8个推进器,实现了六自由度控制以及更大的负载能力。
深度等级
BlueROV2的设计水深为100米(330英尺)的深度。实际打压测试300米,各模块指标均正常。
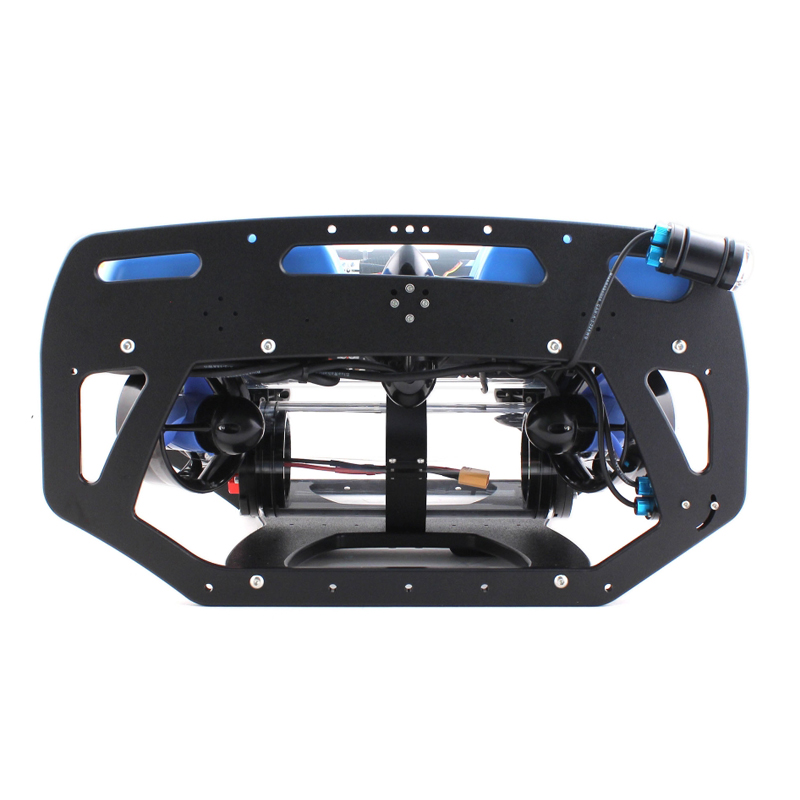
模块化框架设计和可扩展性
BlueROV2是扩展性极高的观测级ROV,其开放式框架承载电子设备和电池盒,推进器,浮力泡沫和压载物。这种简单的设计坚固耐用且可扩展性强,可轻松搭载其他附件,包括摄像头、前视声呐、水下GPS等。用户可以自己设计框架来代替BlueROV的框架,从而实现任何样式的水下机器人!
开源控制软件和用户界面软件
BlueROV2使用ArduSub控制固件。ArduSub作为ArduPilot项目的一部分,它为ROV带来了众多功能以及广泛的用户。岸上,操作员通过便携式计算机和游戏手柄控制器控制ROV。携式计算机上搭载开源的GroundControl应用,GroundControl为用户提供实时的视频流,传感器信息。
产品参数
基本参数
长457毫米 | 宽338毫米 |
高254毫米 | 净重9~11千克 |
净浮力0.2千克 | 载重量1.0千克 |
性能参数
| 最大下潜深度100米 | 最大测试深度130米 |
| 使用水域温度0~40℃ | 最大前进速度1.5米/秒 |
| 前向推力 9KGF | 垂向推力 7KGF |
| 侧向推力 9KGF |
灯
亮度 1500Lux 可调光控制 | 灯速角 135° 可调整角度 |
零浮力电缆
| 直径 7.6毫米 | 长度 25~300米 |
| 抗拉强度 45KGF | 断裂强度 160KGF |
| 强度支撑 凯夫拉纤维和浮力材料 | 淡水中浮力 中性 |
| 海水中浮力 略有上浮 |
| 云台范围 上下各90° | 摄像机视角 110° |
| 摄像机感光度 0.01lux | 摄像机分辨率 1080P |
电池
| 续航时间 3小时(可加购电池,30秒完成电池更换,增加续航时间) |
应用领域

推荐商品



