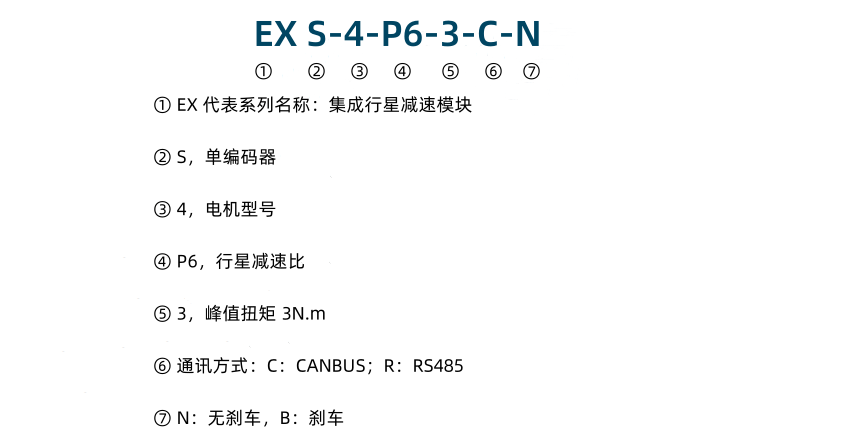
产品描述
EX单编S系列多种可选型号:S4-3,S6-7,S6-40,S8-25;额定扭矩范围:1.5N.m~10N.m。高转速,高动态响应和大扭矩密度。适用于机械臂/人形机器人/外骨骼机器人/四足机器人/RGV等。
采用先进的高纯度轴承钢,使承受寿命高达80%, 耐200度高温。提供上位机调参/测试/固件升级, 实时数据读取控制, 简单易用支持微处理器直接发送命令。

功能特点
支持安装第二编码器
控制精度更高
第二编码器记录绝对位置
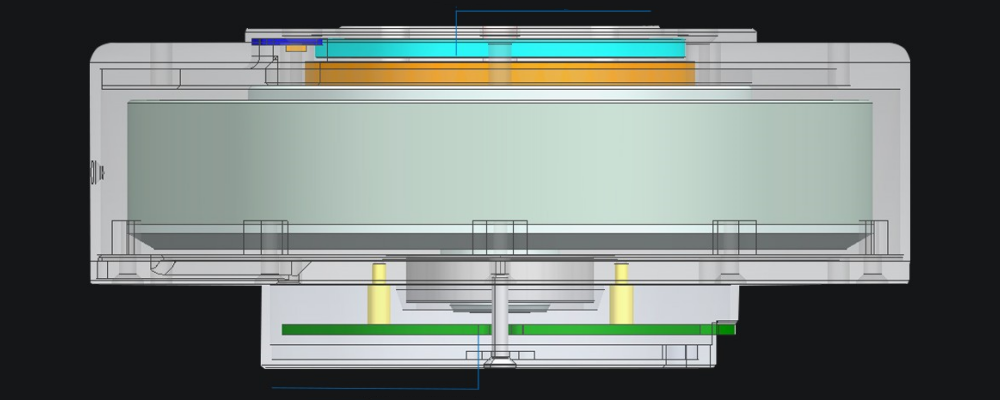
第一编码器记录多圈位置
无惧断电后角度再次发生变化
适合机械臂应用场景
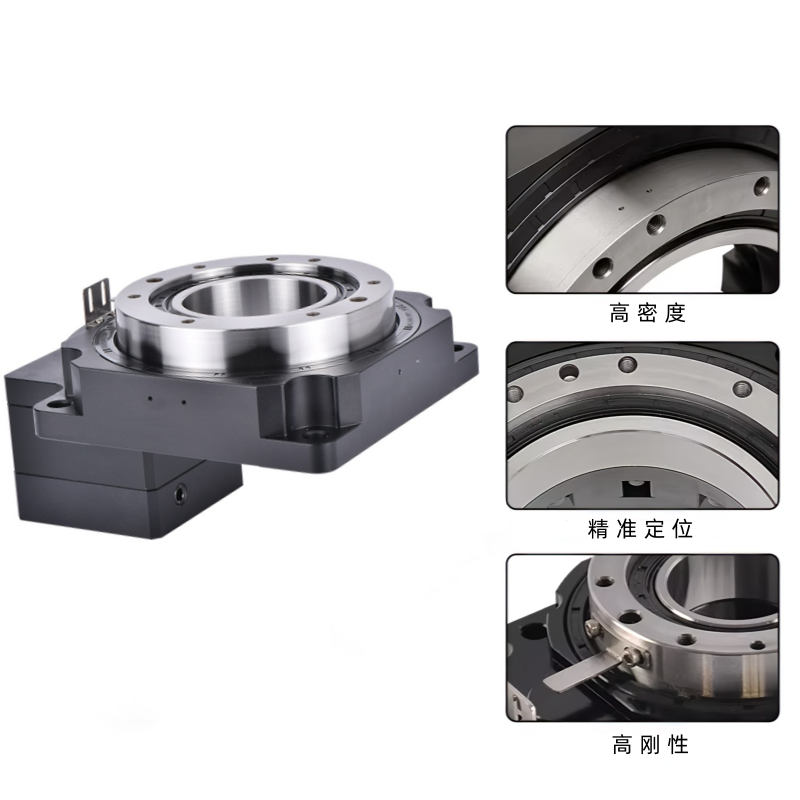
高密度无刷电机
安全静音精准控制
采用最新MC-100驱动,体积小巧动力强劲
应用
EX单编系列行星减速模组采用紧凑型行星齿轮结构,具有高扭矩密度、低背隙(≤1弧分)和优异抗冲击性,适用于空间受限的精密传动场景。广泛应用于工业机器人关节、协作机械臂,360°摄像头,吊舱云台,影视拍摄,实现高精度定位与平稳动力传输。其模块化设计支持快速集成,适配伺服/步进电机,显著提升设备动态响应与能效,尤其适合轻量化、高负载的自动化需求。




产品参数
1. 标准品电机不支持抱闸,如需可定制抱闸。
2. 标准品电机不支防水,如需可定制品IP54。
3. 标准品电机支持CAN BUS和 RS485。
参数 | 单位 Unit | S 4-3 | S 6-7 | S 6-40 | S 8-25 |
减速比 | 一 | 6 | 6 | 36 | 9 |
输入电压 | V | 24 | 48 | 48 | 48 |
额定转速 | RPM | 200 | 400 | 90 | 110 |
额定转矩 | N.m | 1.5 | 3.5 | 18 | 10 |
额定功率 | w | 30 | 150 | 170 | 125 |
额定电流 | A | 2 | 4 | 5.2 | 3.2 |
峰值扭矩 | N.m | 3 | 7 | 40 | 25 |
峰值电流 | A | 4 | 9 | 10.5 | 8 |
效率 | % | 60 | 70 | 70 | 80 |
极对数 | 一 | 14 | 14 | 14 | 21 |
反驱力矩 | N.m | 0.06 | 0.08 | 0.91 | 0.61 |
背隙 | Arcmin | 10 | 10 | 15 | 10 |
轴向负载 | N | 300 | 775 | 775 | 985 |
径向负载 | N | 550 | 1250 | 1250 | 1250 |
转动惯量 | Kg.cm² | 1.2 | 4.8 | 28.8 | 30.6 |
编码器类型 | bit | 18 | 18 | 18 | 18 |
通信方式 | 一 | CAN:1M/RS485:115200/500K/1M/2.5M | |||
重量 | kg | 0.3 | 0.35 | 0.59 | 0.71 |
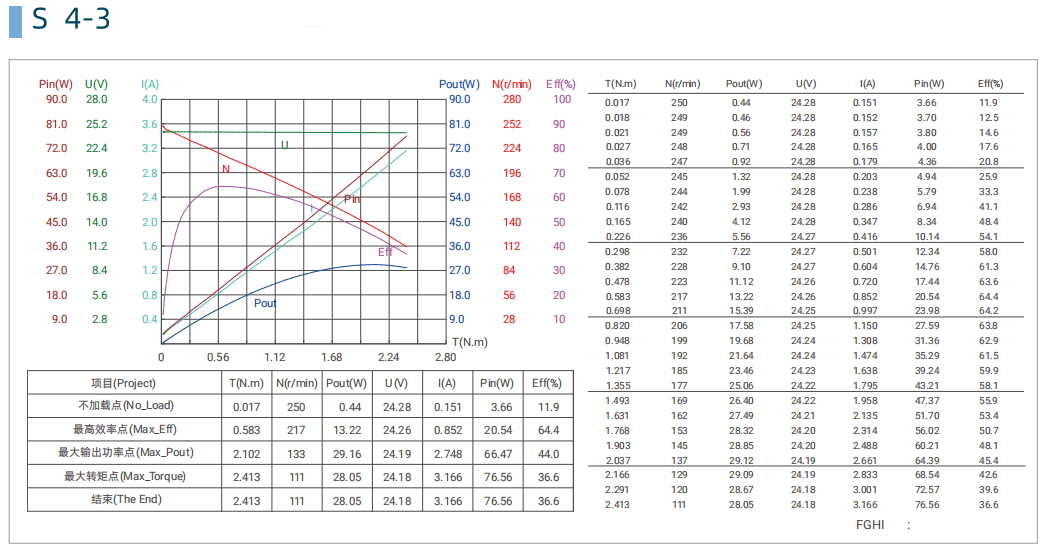
额定扭矩测试方法:在环境温度摄氏24度(无其他散热方式)下,在额定转速下进行测试,电机扭矩在温升60度条件下达到温度平衡、可长时间工作点为该电机额定扭矩值。
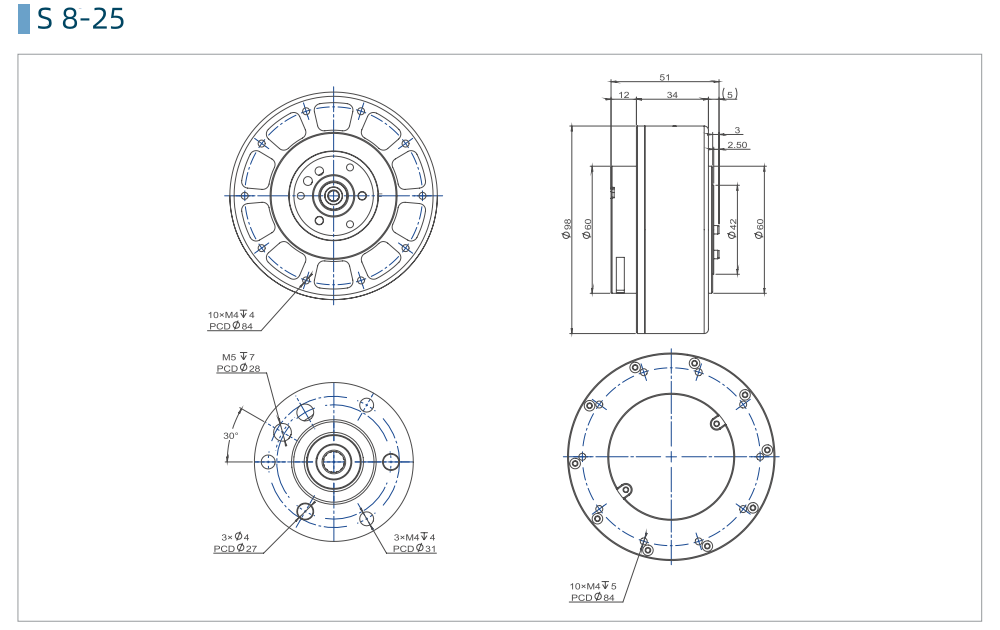
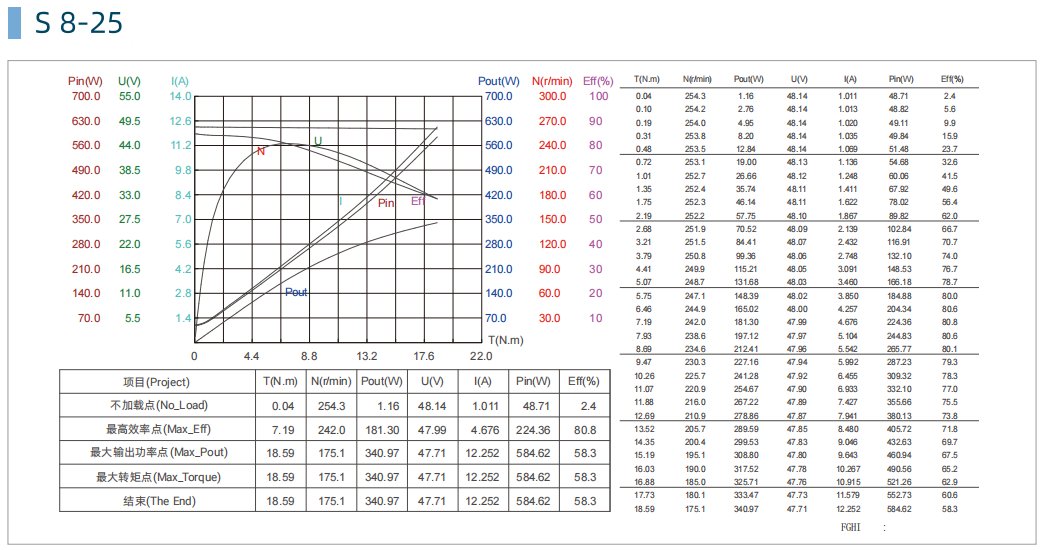
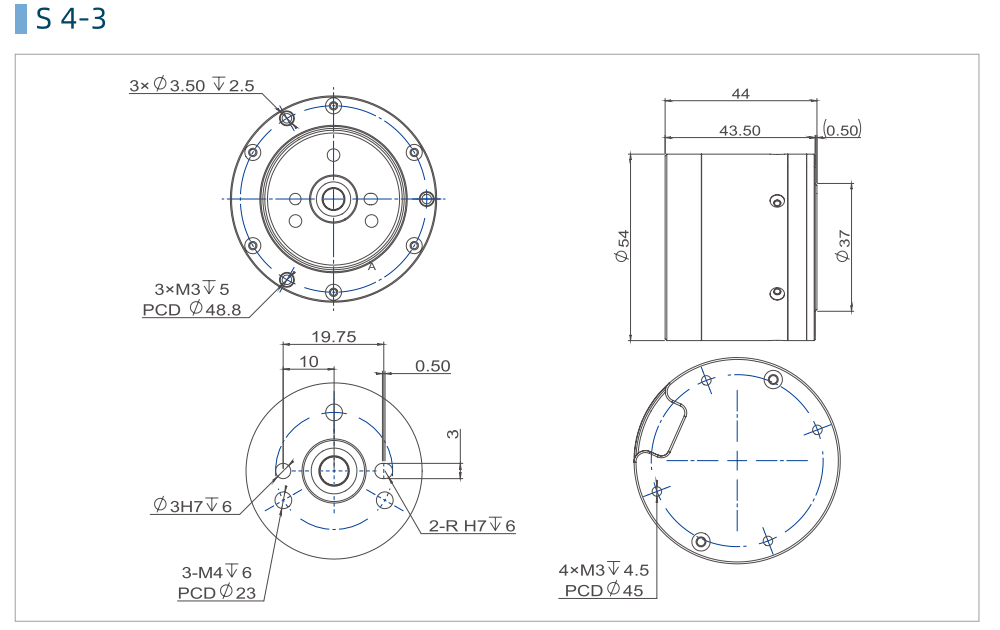
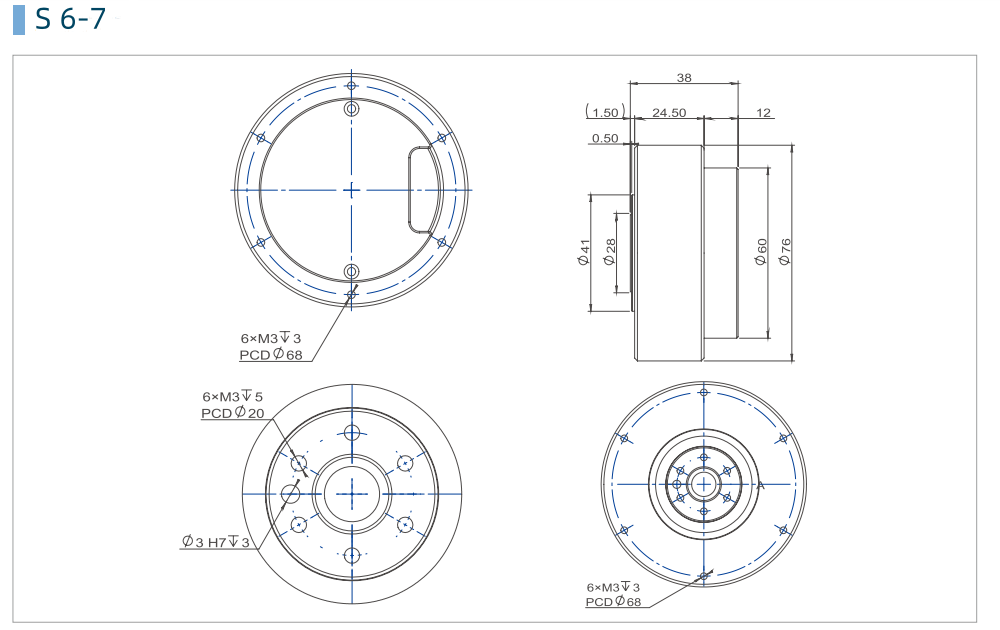
安装图纸和电机特性曲线图
EX S-4-P6-3-X-N
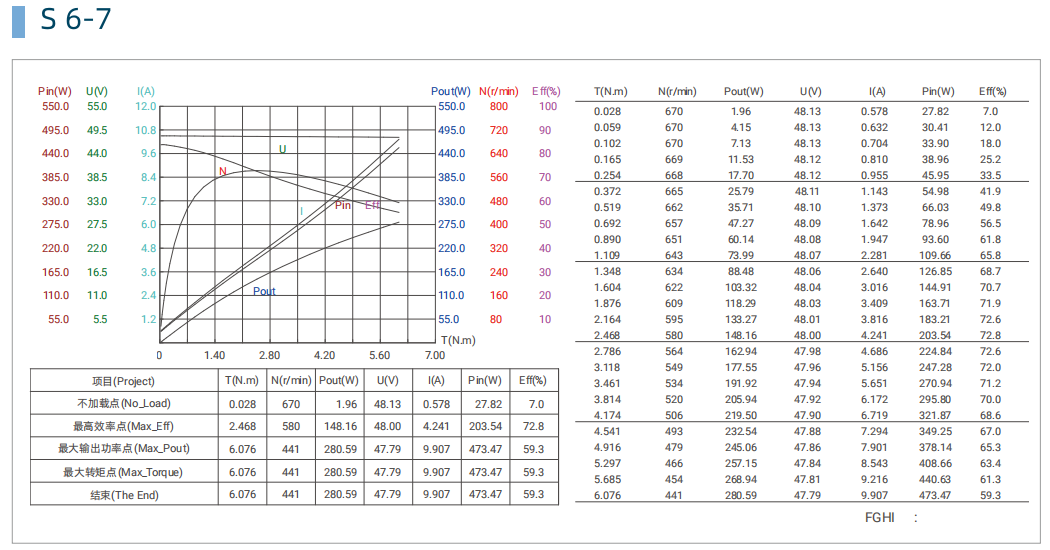
EX S-6-P6-7-X-N
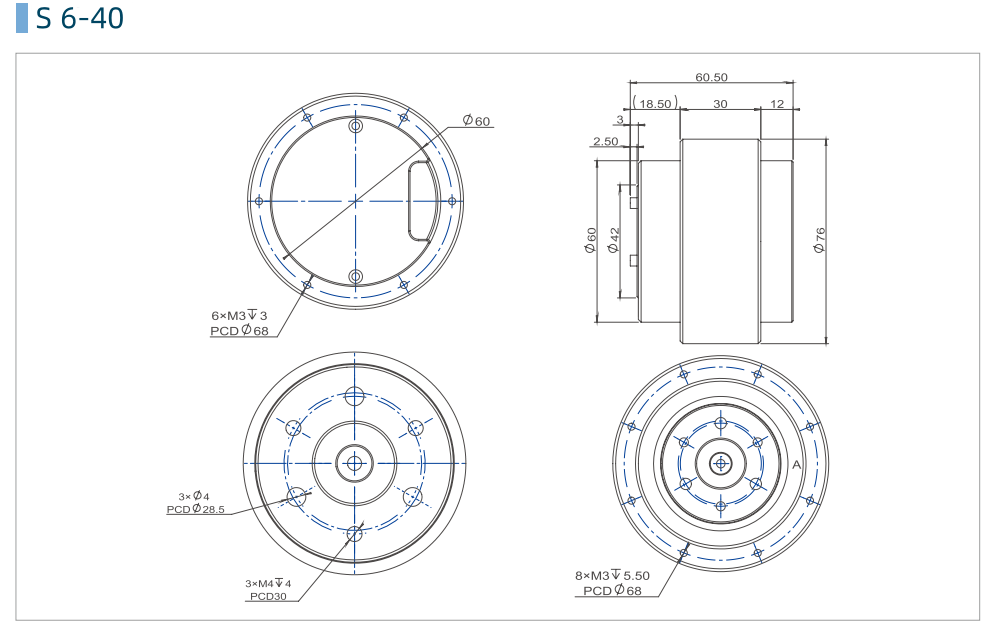
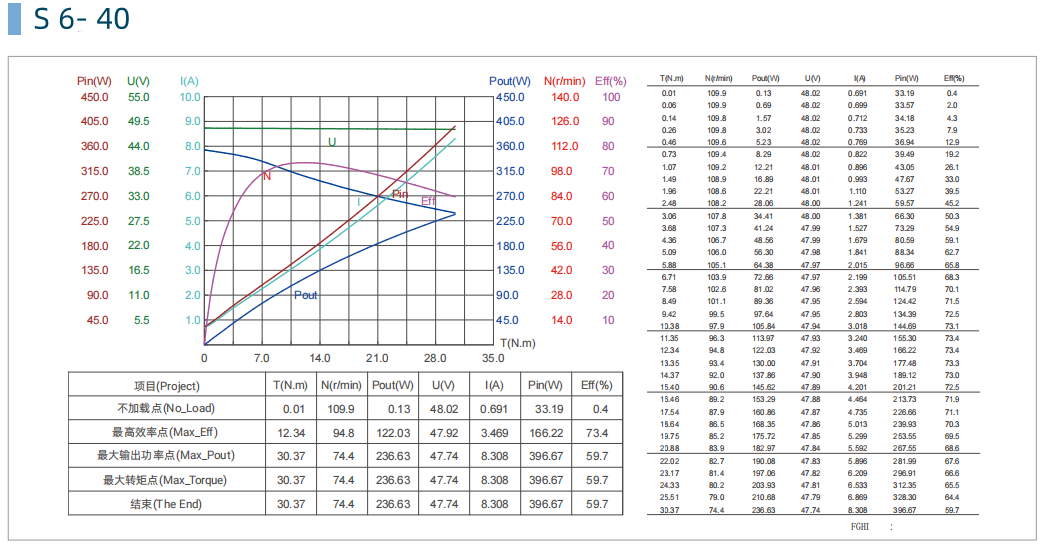
EX S-6-P36-40-X-N
EX S-8-P9-25-X-N