








 T1
4 Years
T1
4 Years



果蔬采摘机器人
农业采摘机器人机械臂果蔬采摘搬运机器人定制
- 电机功率:2*600W
- 负载:200kg
- 导航精度:±20 mm
- 最大行使速度:1m/s
- 最小转弯半径:1m
- 工作续航时间:3h
CNY: 询价
ablity:Monthly Output200
- Paglalarawan ng Produkto
- Product Params
Paglalarawan ng Produkto
果蔬采摘机器人
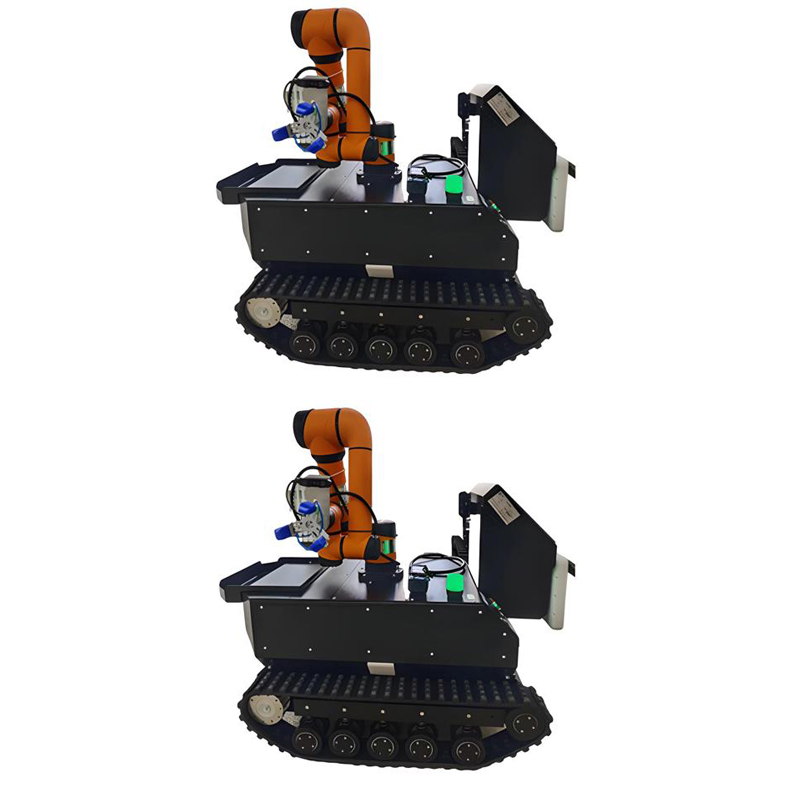
果蔬采摘机器人是融合人工智能和多传感器技术,采用基于深度学习的视觉算法,引导机械手臂完成识别、定位、抓取、切割、放置任务的高度协同自动化系统,可解决自然条件下的果蔬选择性收获难题,是智慧农业的标志性产品。
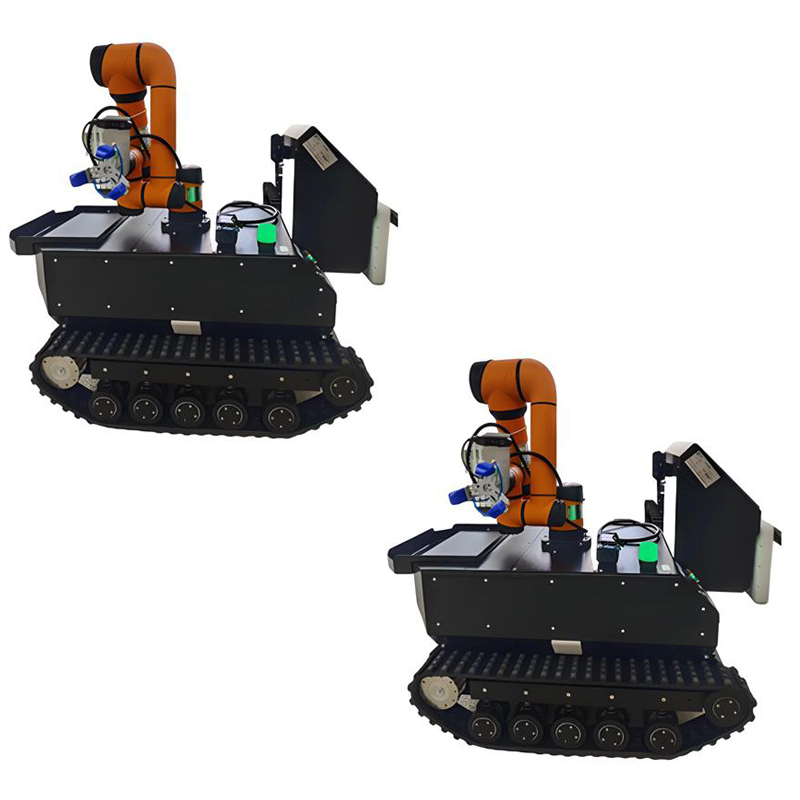
果蔬采摘机器人由底盘系统、视觉伺服系统和采摘执行系统组成。底盘系统结合路面情况,采用轮式、轨道式履带式复合行走机构,可适应温室硬化路面、轨道、室外地面的种植场景。其中轨道式底盘选取双舵轮结合轨道轮行走机构满足平整路面、自动上下轨、自动换轨等多种设施农业应用场景。采用激光 SLAM 算法,结合多种传感器,使其更能适用于高端设施温室环境;视觉伺服系统采用AI+深度立体视觉识别技术,实现对番茄大小、颜色、形状、成熟度和采摘位置的信息获取及处理,同时通过对机械臂运动轨迹的实时规划和避障,完成视觉伺服采摘的轨迹引导;采摘执行系统采用6自由度协作机械手臂结合升降柱和底盘,通过合理的采摘姿态和决策规划,完成果蔬的自动采摘、自动摆放等任务。
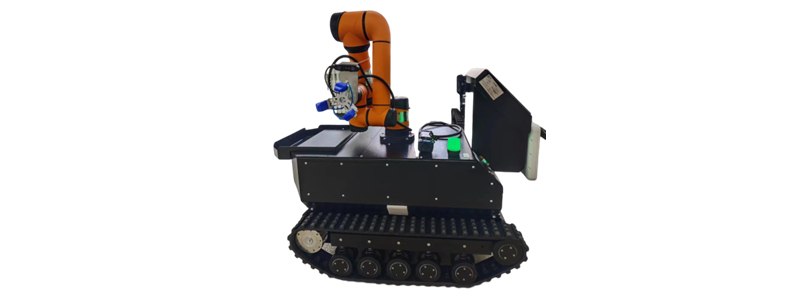
履带式果蔬采摘机器人参数
—— -
采摘机器人开发平台 TSCZ-5 | 结构形式 | 履带式 |
| 电机功率 | 2*600W | |
| 负载 | 200kg | |
| 导航精度 | ±20 mm | |
| 最大行使速度 | 1m/s | |
| 最小转弯半径 | 1m | |
| 控制方式 | 遥控/自动 | |
| 遥控距离 | 100m | |
| 避障范围 | 0.1-1m | |
| 工作续航时间 | 3h | |
| 充电时间 | 6h | |
| 行走速度 | 0-1m/s | |
| 最大爬坡角度 | 15° | |
| 防撞功能 | 超声波 | |
| 防护等级 | IP67 | |
| 工作温度 | -40℃~+85℃ |
农业机器人视觉与执行系统 TSCZ-5-ZX | 机械臂自由度 | 6自由度 |
| 定位精度 | 测量距离小于1m时,X轴和Y轴的误差≤8mm,Z轴(纵向)的误差≤10mm | |
| 采摘范围 | 1m工作距离范围内,不小于700×500mm | |
| 负载能力 | 3kg | |
| 导航摄像头分辨率 | 320*240,30帧/秒 | |
| 光照度范围 | 4300lux - 8400lux | |
| 彩色空间 | RGB、HIS、YcBcR基于Windows平台的视觉导航软件 | |
| 深度相机视场角 | 87° × 58° | |
| 彩色相机分辨率 | 1920 × 1080 | |
| 彩色相机视场角 | 69°× 42° |
采摘机器人软件 (番茄) TSCZ-5-ZX-RJ | 识别方式 | 深度学习 |
| 导航系统 | 依托多传感器融合算法构建导航地图 | |
| 果蔬定位方式 | 3D视觉定位算法 |
产品特点
—— -
果实精准采收
· 通过智能深度学习算法、2D、3D视觉算法精准判别可采摘果蔬的大小,颜色、形状、成熟度和采摘位置定位
柔性抓取控制
· 柔性采摘手通过自适应控制完成果蔬采摘位置抓取,不伤果
多地形作业与导航
· 针对农业地形和材质的多样性,提供履带式、轮式或轨道式多种行走系统和驱动方式满足不同场景要求
应用场景
—— -
场地类型 设施农业(适合轨道轮式)、非设施农业场景(适合履带式) | 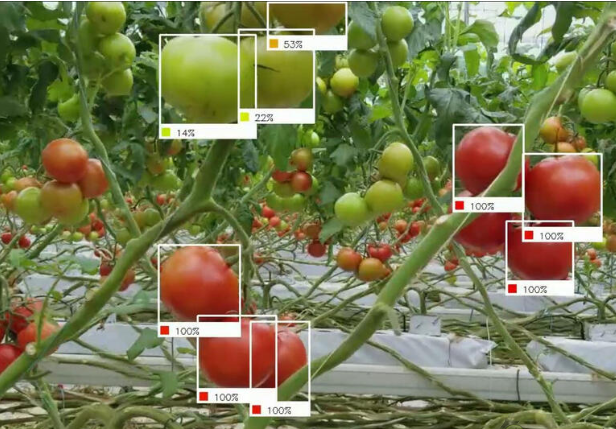 |
果蔬种类 单果番茄、串番茄、葡萄、黄瓜、草莓、橘子、猕猴桃等 |  |
*此款为定制款,参数仅供参考,详情请联系商家咨询