














Product Description
This solid articulated motor combines a dc torque motor, driver, encoder and high precision harmonic reducer. M Series joint actuators make automated production easier and more efficient. It can be widely used in CNC machine, automated production lines, robot arms, humanoid robots, large rotating platforms. This product has stable performance and fewer after-sales problems, making it the first choice for robot customers.



Product parameters
| Parameter | M4215E14B50L | M4215E14B80L | M4215E14B100L | |
| Overall parameter | Motor rated voltage | 36VDC±10% | 36VDC±10% | 36VDC±10% |
| Motor rated current | 2A | 2A | 2A | |
| Output torque after deceleration | 10NM | 10NM | 10NM | |
| Weight | 0.8KG | 0.8KG | 0.8KG | |
| Speed range after deceleration | 0~40RPM | 0~25RPM | 0~20RPM | |
| Reducer parameter | Reduction ratio | 50 | 80 | 100 |
| Rated torque | 7NM | 10NM | 10NM | |
| Peak start-stop torque | 23NM | 30NM | 36NM | |
| Backlash | <10 arc seconds | < 10arc seconds | < 10arc seconds | |
| Design life | 8500hour | 8500hour | 8500hour | |
| Motor parameter | Torque | 0.5NM | 0.5NM | 0.5NM |
| Rated speed | 1500RPM | 1500RPM | 1500RPM | |
| Maximum rotational speed | 2000RPM | 2000RPM | 2000RPM | |
| Power | 50W | 50W | 50W | |
| Resistance | 2.65 | 2.65 | 2.65 | |
| Inductance | 1.1mh | 1.1mh | 1.1mh | |
| Rotary inertia | 0.9139x10-5 KG/M 2 | 0.9139x10-5 KG/M 2 | 0.9139x10-5 KG/M 2 | |
| Feedback signal | Multi-turn absolute encoder (15 bit single-turn and 16 bit multi-turn) | |||
| Cooling mode | Natural cooling | |||
| Position Control Mode | Maximum input pulse frequency | 500KHz | ||
| Pulse instruction mode | Pulse + direction, A phase +B phase(needs the controller supports AB pulses) | |||
| Electronic gear ratio | Set up 1~65535 to 1~65535 | |||
| Location sampling frequency | 2KHZ | |||
| Protection function | Lock-motor alarm, over-current alarm | |||
| Communication interface | Canopen (CAN Communication) /Modbus(485 communication) | |||
| Environment | Ambient temperature | 0~40° | ||
| Max. permissible temperature of motor | 85° | |||
| Humidity | 5~95% | |||
Product Display

· Isolated CANopen communication
· Built-in isolated power supply
· Low power consumption multi-turn absolute value built-in battery
· Automatic charging
When the motor is powered, there is a charging circuit inside to charge the battery
· After the motor is not powered, the motor shaft is driven to rotate to wake up the encoder and continue to memorize the position the battery current consumption is only 0.07mA
· Battery power down alarm
- CANOPEN host computer is provided to monitor motor status and modify parameters.
- Position mode, support pulse + direction signal, encoder follow
- Speed mode, support PWM duty ratio signal speed regulation
- With blocked rotation, overcurrent protection, overvoltage protection.
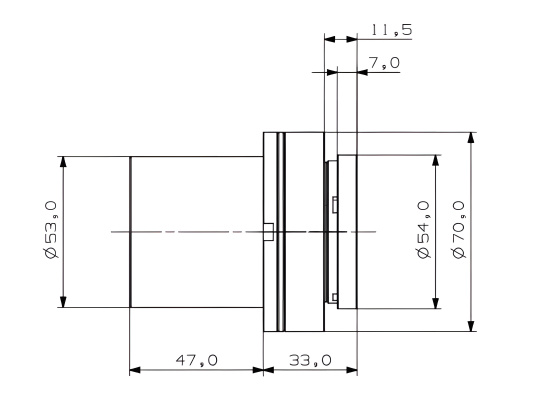
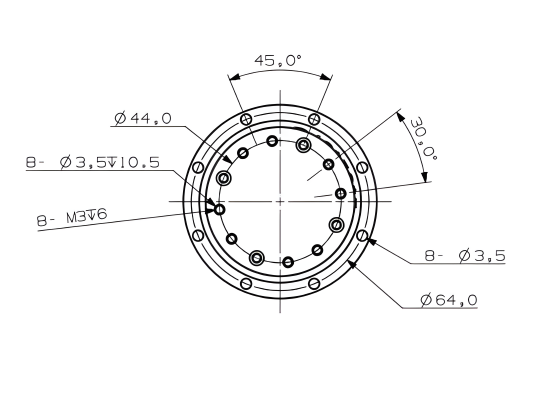
Size & Interface
Application Cases
This series of joint module actuators can be applied to industrial robots, collaborative robot arms, bipedal and quadruped bionic robots, medical robots (surgery and rehabilitation robots, etc.),AGV vehicles, fruit and vegetable picking robot arms, camera head and so on.
With modular design, compact joint actuator, its weight, size, installation mode, appearance lamp compared with the traditional products have done a considerable optimization, mainly used in collaborative robot and and light robot, can meet the miniaturization, lightweight, modular needs to a large extent. This series robot joint motors can also be widely used in CNC machine, automated production, robot arms, humanoid robots, and large rotating platform.









