

产品描述
M16是新研制的一款16线三维激光雷达,主要用于对中远距离快速移动物体的测量和快速移动物体对周边环境的测量。具有测量速快、空间分辨率高、点云数据捕获密集、体积小等特点,是无人驾驶汽车和ADAS的必备核心传感器,同时还可应用于三维地图测量等领域。


产品参数
| 项目(Project) | 指标(Index) |
|---|---|
| 激光波长 | 905nm |
| light source | |
| 扫描速度 | 20Hz |
| Scanning speed | |
| 测量视场 | 360°X30° |
| Measuring field of view | |
| 角分辨率 | 0.24°X2° |
| Angular resolution | |
| 扫描线数 | 16线 |
| Number of scan lines | |
| 测量距离 | 0.1~200m |
| Measuring distance | |
| 距离分辨率 | 1cm |
| Distance resolution | |
| 测量精度 | ±3cm |
| measurement accuracy | |
| 输出接口 | Ethernet |
| Output Interface | |
| 供电 | DC9~32V |
| Power supply | |
| 操作温度范围 | -20℃~+55℃ |
| Operating temperature | |
| 存储温度范围 | -40℃~+85℃ |
| storage temperature | |
| 防护等级 | IP67 |
| Protection level |
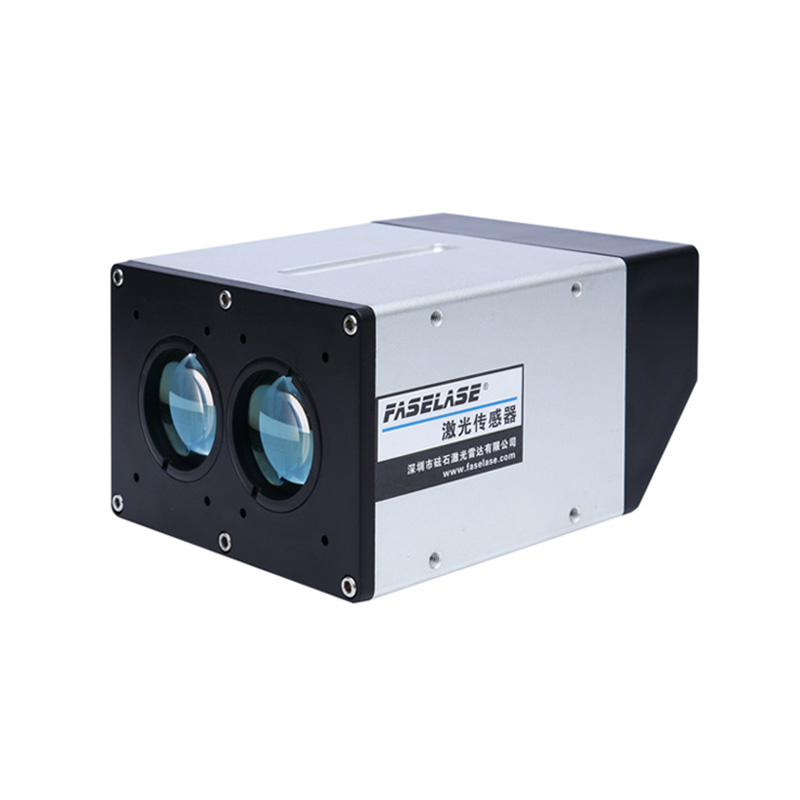
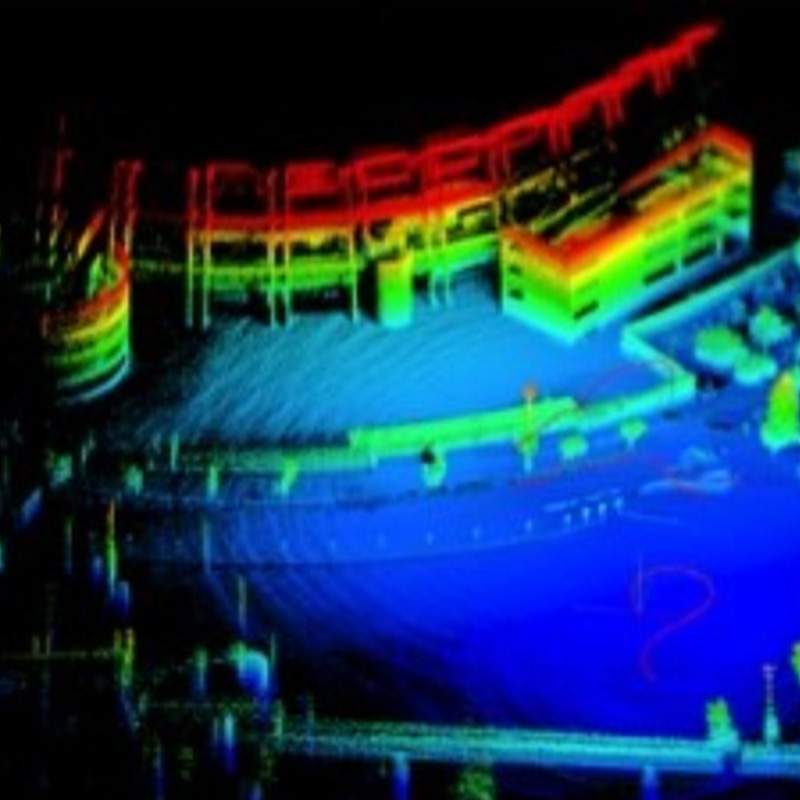
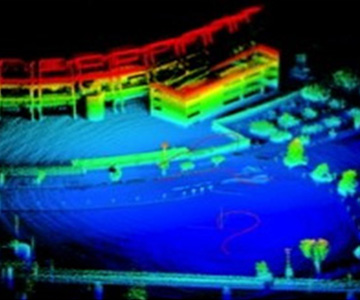
产品展示

● 探测距离远:可达200m
● 点云数据密集:每秒32万个点,360°扫描,16线测量周边环境,构建准确的三维空间地图
● 水平扫描视角:360°,垂直角度:30°
● 防护等级:IP65(防尘防水)
● 采用人眼安全保护激光,符合标准
● 具备3D激光点云数据分析系统,方便用户二次开发

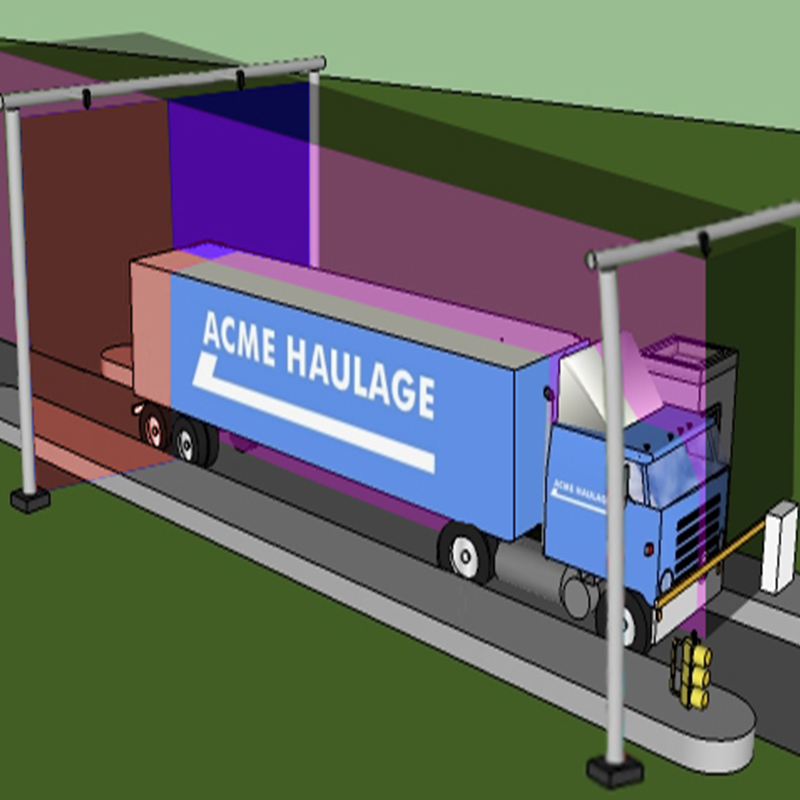
大角度扫描:通常具有较大的扫描角度,能够实现水平方向上的 360° 扫描以及一定范围内的垂直方向扫描,从而覆盖较大的空间范围,对周围环境进行全面的探测。
远距离探测:可以探测到较远的距离,一般的三维激光雷达探测距离在几十米到几百米甚至更远,能够满足不同应用场景下对远距离目标探测的需求6
品控
- 光学部件
对于激光发射模块中的激光器,需要严格检测其波长精度、输出功率稳定性等参数。例如,波长的偏差可能会影响激光雷达对目标物体反射光的准确接收和解析,一般要求波长偏差控制在极小的范围内,如 ±5nm 以内。
光学透镜的质量也至关重要。透镜的曲率精度、表面平整度以及对不同波长激光的透过率等指标都要经过精密检测。任何微小的瑕疵,如透镜表面的划痕或者曲率不均匀,都可能导致激光的散射或聚焦不准确,从而影响激光雷达的探测精度。透过率一般要求在特定波段达到 90% 以上。
- 电子元件
电路板上的芯片是激光雷达的 “大脑”,对其进行品控时,要确保芯片的性能符合设计要求。例如,检测其数据处理速度是否能够满足激光雷达实时获取和处理大量点云数据的需求。同时,还要检查芯片在不同温度环境下的稳定性,因为激光雷达在工作过程中可能会产生热量,芯片性能必须在一定的温度范围内(如 - 40℃ - 85℃)保持稳定。
电容、电阻等分立元件的参数精度也不容忽视。这些元件的标称值与实际值的偏差范围要控制在一定限度内,如电阻的阻值偏差不超过 ±1%,以保证电路的正常工作和信号传输的准确性。

应用案例
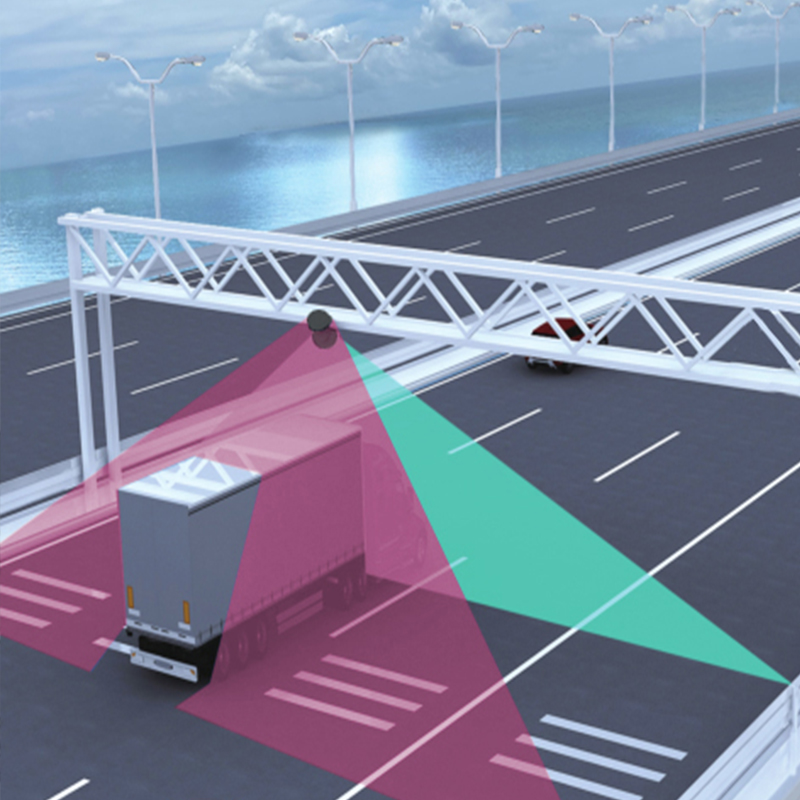
无人驾驶环境感知核心专为量产车型配备;多线激光雷达,对车辆周围环境的精确感知,即便在扬沙和雾霾等恶劣天气条件及极端光照变化下,可以正常工作;加速L4/L5级别无人驾驶发展进程的解决方案。


服务
产品培训服务:公司可以为客户提供关于激光雷达产品使用方法、操作流程、数据解读等方面的培训。这有助于客户更好地运用激光雷达设备,减少因操作不当而产生的问题。例如,为汽车制造企业的工程师培训车载激光雷达的调试和数据收集方法,使他们能够理解雷达在自动驾驶场景中的工作机制。
产品定制服务:根据不同客户的特殊需求,对激光雷达的性能参数(如探测距离、角度分辨率、扫描频率等)、外形尺寸、安装方式等进行定制。例如,对于空间受限的无人机应用场景,定制小型化、轻量化的激光雷达。