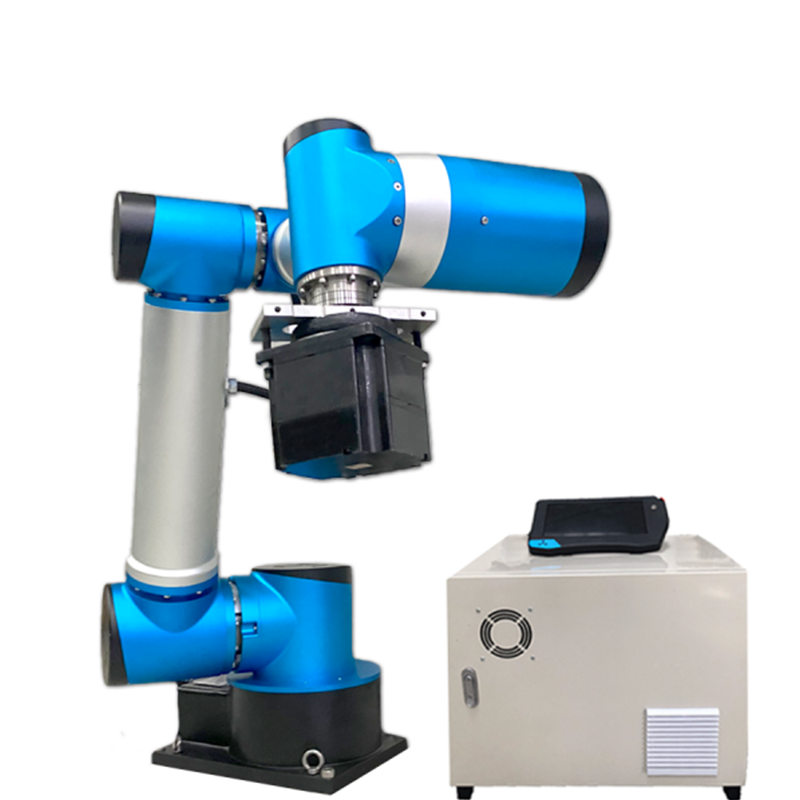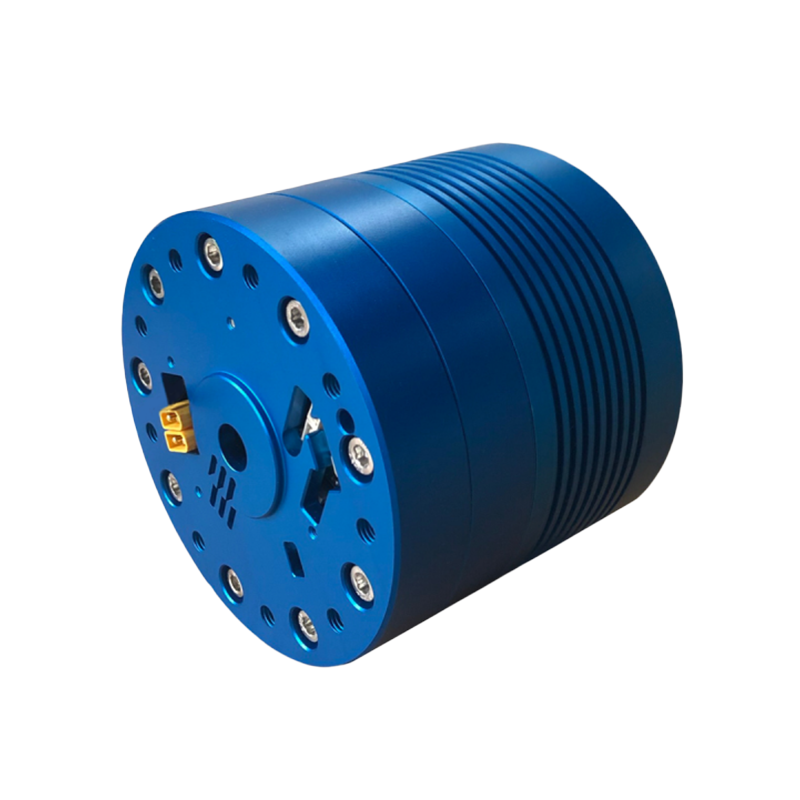
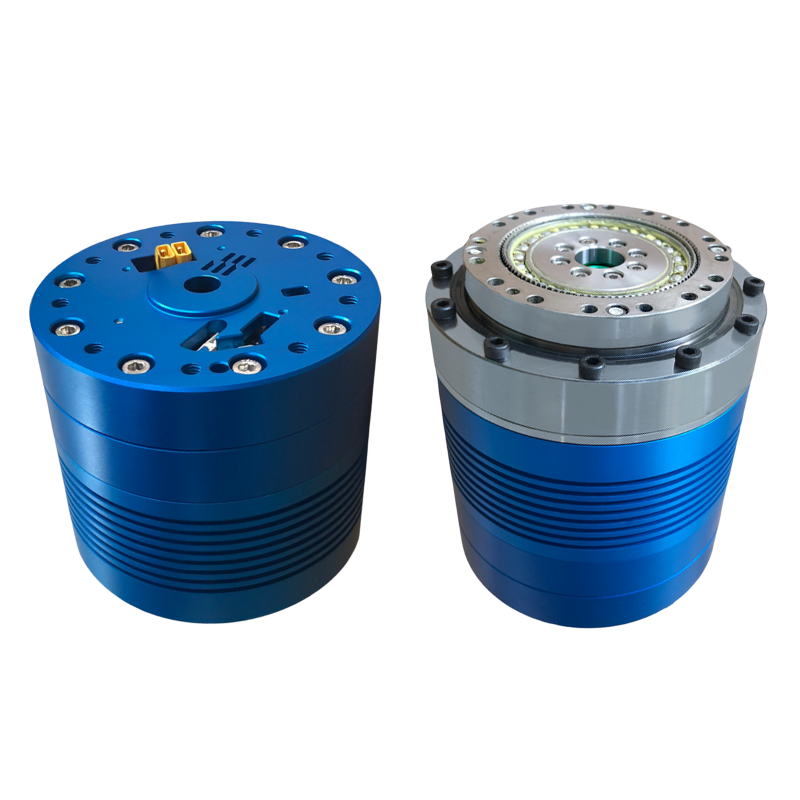
Mô tả sản phẩm
Khớp nối robot cộng tác VJ có tính linh hoạt cao trong hệ thống truyền động, cho phép điều chỉnh và tương thích với nhiều loại cobot và các ứng dụng khác nhau. Nó cung cấp khả năng tương thích đa dạng và dễ dàng tích hợp vào các hệ thống tự động hóa hiện có.
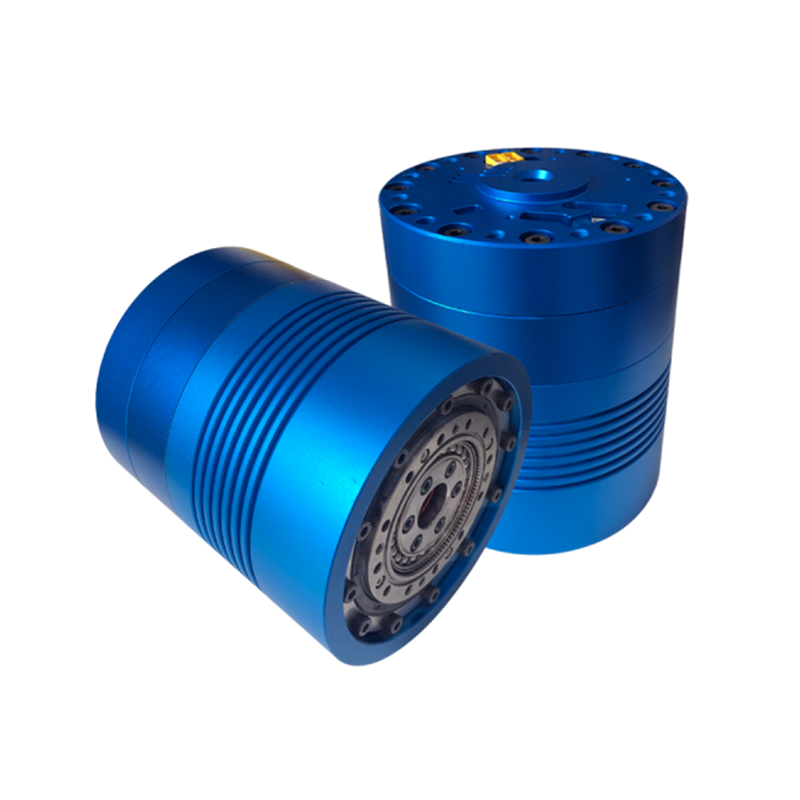
Thông số sản phẩm
| Model | VJ-01 | VJ-02 | VJ-03 | VJ-04 | |||||||||
| Tỷ lệ | 14-50 | 14-80 | 14-100 | 17-50 | 17-80 | 17-100 | 20-50 | 20-80 | 20-100 | 25-50 | 25-80 | 25-100 | 25-120 |
| Tốc độ cực đại đầu ra (RPM) | 60 | 37.5 | 30 | 60 | 37.5 | 30 | 60 | 37.5 | 30 | 60 | 37.5 | 30 | 25 |
| Mô-men xoắn định mức (Nm) | 22.8 | 36.5 | 45.6 | 37.6 | 60.16 | 90.24 | 58 | 92.8 | 116 | 70.4 | 112.6 | 140.8 | 169 |
| Mô-men xoắn cực đại (Nm) | 65.2 | 104.3 | 130.4 | 107.2 | 171.5 | 257.3 | 164 | 262.4 | 328 | 198 | 316.8 | 396 | 475.2 |
| Công suất động cơ (W) | 100 | 200 | 400 | 750 | |||||||||
| Điện áp (V) | 48 ( +/- 10%) | ||||||||||||
| Dòng điện định mức (A) | 3.5 | 6.5 | 10.5 | 17 | |||||||||
| Dòng điện cực đại (A) | 15 | 19 | 29 | 48 | |||||||||
| Độ phân giải bộ mã hóa đầu ra | 20 Bits | ||||||||||||
| Độ chính xác định vị lặp lại (độ) | +/- 0.0025 | ||||||||||||
| Bus truyền thông | EtherCAT/ CANopen | ||||||||||||
| Đường kính ngoài x chiều dài x lỗ xuyên qua (mm) | 75 x 101 x 10 | 95 x 106 x 12 | 105 x 108 x 14 | 110 x 128 x 16 | |||||||||
| Trọng lượng (kg) | 1 | 1.4 | 2.5 | 3.3 | |||||||||
| Phanh | Phanh giảm ma sát | ||||||||||||
| Xếp hạng IP | IP54 | ||||||||||||
Xem sản phẩm

- Điều khiển hướng trường 3 pha (FOC)
- Bộ mã hóa tuyệt đối (20 bit tại động cơ)
- Lấy mẫu dòng điện có độ phân giải cao
- Thuật toán làm suy yếu thông lượng
- Feed-Forward
- Tạo SVPWM (Kiểu mẫu PWM trung tâm & Tần số PWM có thể điều chỉnh)
- Chế độ điều khiển mô-men xoắn, chế độ điều khiển tốc độ & chế độ điều khiển vị trí
- Chiến lược phanh (Chập mạch pha động cơ)
- Điều chỉnh chính xác thời gian thực của Bộ điều chỉnh PID
- Quản lý lỗi: Quá dòng, Quá áp, Quá nhiệt, Lỗi độ tin cậy phản hồi tốc độ
- EtherCAT Slave tốc độ cao (100 Mbps Full-Duplex)
- Lệnh gỡ lỗi thiết bị đầu cuối qua UART
- Phát hiện va chạm khớp
- Tự chẩn đoán hư hỏng khớp
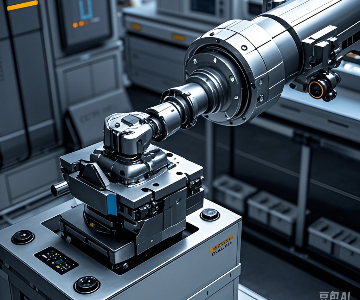
Trường hợp ứng dụng
Các khớp nối robot cộng tác siêu lớn có ứng dụng quan trọng trong nhiều lĩnh vực. Trong sản xuất ô tô, nó hỗ trợ lắp ráp thân xe, điều khiển chính xác cánh tay robot để mang các bộ phận nặng, đảm bảo độ chính xác lắp ráp và cải thiện hiệu quả sản xuất. Trong ngành hậu cần, nó có thể linh hoạt điều khiển cánh tay robot để phân loại hàng hóa nhanh chóng, thích ứng với các hoạt động cường độ cao và dài hạn, đồng thời giảm chi phí lao động. Trong đóng tàu, nó có thể điều khiển các công cụ lớn để hàn và mài, và xử lý các tấm thép nặng có khả năng chịu tải cao để đảm bảo chất lượng quy trình. Đồng thời, trong lĩnh vực hàng không vũ trụ, nó hỗ trợ chính xác trong việc lắp ráp các bộ phận chính xác, trao quyền cho sản xuất cao cấp và thúc đẩy phát triển công nghiệp lên tầm cao mới.